Изобретение относится к Ъбласти производства изделий сборного бетона и железобетона. Известно устройство для крепления формы на виброплощадке, содержащее корпус с пазом для установки в него формы или ее части, смонтированные с возможностью перемещения в направляйщих зажимные клинья и привод, выполненный в виде двухплечих рычаго одним из концов связанных с заж1ад:Н Ф1 клиньями, а другим - с силовьамицили драми 1 . Недостатком указанного устройства является то, что для закрепления фор мы необходимо иметь два силовых цили дра (по одному на каждый клин) что усложняет конструкцию и снижает его надежность. Кроме того, в известном устройстве усилие, передаваемое от силового цилиндра на зажимной клин, при зажатии и разжатии формы практически одинаково. В процессе вибрир вания из-за упругой деформации.- корпуса устройства происходит дополнительное заклинивание зажимного клина в результате чего усилия силового ци линдра часто недостаточно, чтобы освободить форму. Помимо этого, из-за необходимости пропустить вниз двухплечий рялчаг привода, корпус зажимного устройства в месте установки формы не всегда удается сделать достаточно жестким. Наиболее близким к предложенному изобретению является устройство для крепления формы к подвижной раме виброплощадки, содержащее размещенные в ее посадочных гнездах зажимные клинья, кинематически связанные посредством рычажной системы со штоком силового цилиндра 2. Недостатком указанного устройства является ненадежность фиксации формы и большая нагрузка на силовой цилиндр. Цель настоящего изобретения - повышение надежности фиксации формы и снижение нагрузки на силовой ци-. линдр. Указанная цель достигается тем, что в устройстве для крепления формы к подвижной раме виброплощадки, содержащем размещенные в ее посадочных гнездах з.ажимные клинья, кинематически связанйые посредством рычажной системы со штоком силового цилиндра,- каждый зажимной клин выполнен с упор)ами рабочего и обратного ходов, выполненных соответственно
в виде упругого элемента и пальца, контактирующих поочередно со свободным концом рычага.
Кроме того, упоры рабочего и обратного ходов одного клина уста|новлены относительно упоров другого клина на различном расстоянии, а упргий элемент упора рабочего хода выполнен резинометаллическим.
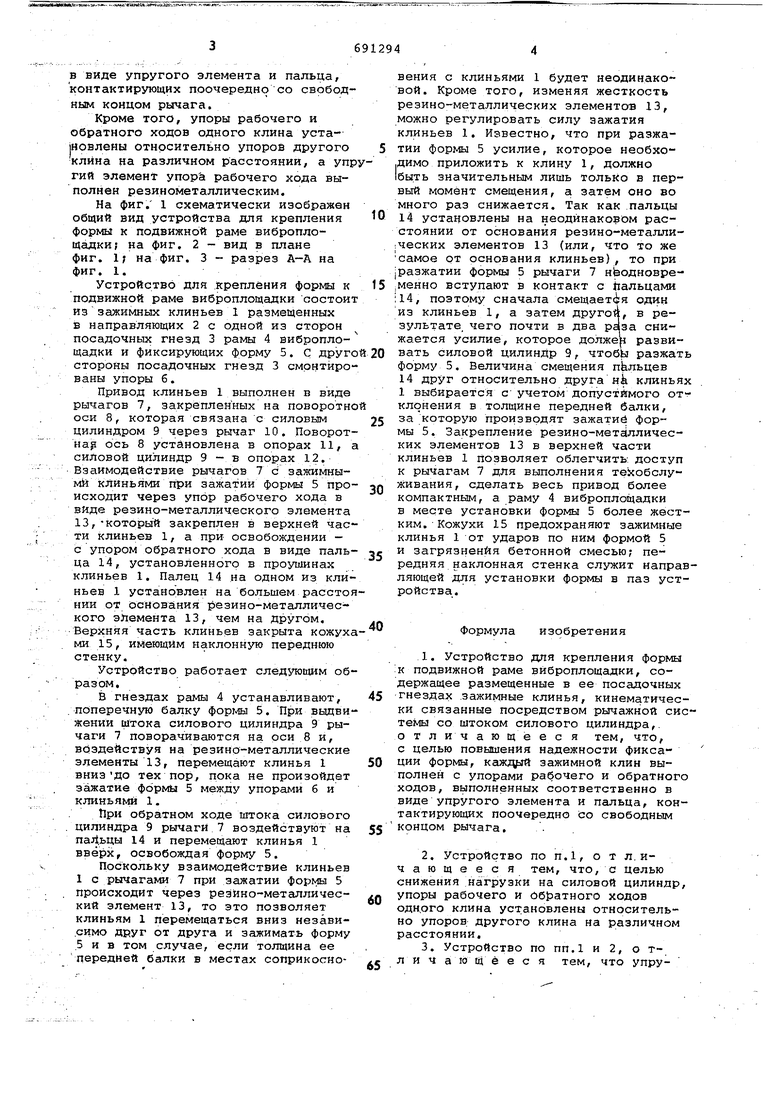
На фиг. 1 схематически изображен общий вид устройства для крепления формы к подвижной раме виброплощадки; на фиг. 2 - вид в плане фиг. 1 на фиг. 3 - разрез А-А на фиг. 1.
Устройство для крепления формы к подвижной раме виброплощадки состоит иззажимных клиньев 1 размещенных в направляющих 2 с одной из сторон посадочных гнезд 3 рамы 4 виброплощадки и фиксирующих форму 5. С друго стороны посадочных гнезд 3 смонтированы упоры 6.
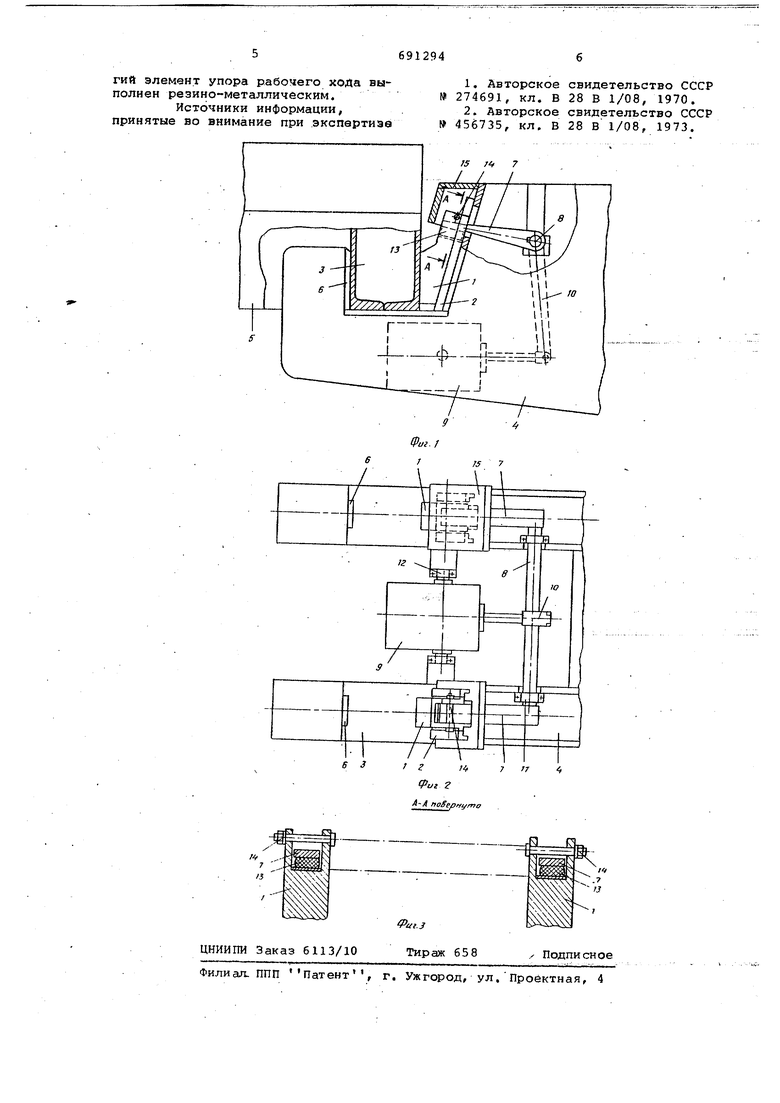
Привод клиньев 1 выполнен в виде рычагов 7, закрепленных на поворотно оси 8, которая связана с силовым цилиндром 9 через рычаг 10. ПоворотHaji ось 8 установлена в опорах 11, а силовой цилиндр 9 - в опорах 12. Взаимодействие рычагов 7 с зажимными клиньями при зажатии формы 5 происходит через упор рабочего хода в виде резино-металлического элемента 13,-который закреплен в верхней части клиньев 1, а при освобождении с упором обратного хода в виде пальца 14, установленного в проушинах клиньев 1. Палец 14 на одном из клиньев 1 установлен на большем расстоянии от основания резино-металлического элемента 13, чем на другом. Верхняя часть клиньев закрыта кожухами 15, имеющим наклонную переднюю стенку.
Устройство работает следующим образом. .
В гнездах рамы 4 устанавливают, .поперечную балку фор1Ф1 5. При выдвижении штока силового цилиндра 9 рычаги 7 поворачиваются на оси 8 и, воздействуя на резино-металлические элементы 13, перемещают клинья 1 внизДО тех пор, пока не произойдет зажатие формы 5 между упорами б и клиньякш 1.
При обратном ходе штока силового . цилиндра 9 рычаги.7 воздействуют на паДьцы 14 и перемещают клинья 1 , освобождая форму 5.
Поскольку взаимодействие клиньев 1 с рычагами 7 при зажатии формы 5 происходит через реэино-металлический элемент 13, то это позволяет клиньям 1 перемещаться вниз незави.симо друг от друга и зажимать форму Бив том случае, если толщина ее передней балки в местах соприкосновения с клиньями 1 будет неодинаковой. Кроме того, изменяя жесткость резино-металлических элементов 13, можно регулировать силу зажатия клиньев 1. Известно, что при разжатии формы 5 усилие, которое необходимо приложить к клину 1, должно быть значительным лишь только в первый момент смещения, а затем оно во много раз снижается. Так как пальцы 14 установлены на неодинаковом расстоянии от основания резино-металли;Ческих элементов 13 (или, что то же самое от основания клиньев), то при (Разжатии формы 5 рычаги 7 нЬодновре,менно вступают в контакт с Ьальцами il4, поэтому сначала смещает4:я один из клиньев 1, а затем другой, в результате, чего почти в два раза снижается усилие, которое должен развивать силовой цилиндр 9, чтобЬ разжат форму 5. Величина смещения пЬльцев 14 друг относительно друга Hk клинья 1 выбирается с учетом допустимого от клонения в толщине передней балки, за которую производят зажатие формы 5. Закрепление резино-металлических элементов 13 в верхней части клиньев 1 позволяет облегчить: доступ к рычагам 7 для выполнения техобслуживания, сделать весь привод более компактным, а раму 4 виброплощадки в месте установки формы 5 более жестким. Кожухи 15 предохраняют зажимные клинья 1 от ударов по ним формой 5 и загрязнения бетонной смесью; передняя наклонная стенка служит напраляющей для установки формы в паз устройства.
Формула изобретения
1.Устройство для крепления формы к подвижной раме вйброплощадки, соержащее размещенные в ее посадочных гнездах зажи№1ые клинья, кинематически связанные посредством рычажной системы со штоком силового цилиндра,, отличающёес я тем, что,
с целью повышения надежности фиксаии формы, каждцлй зажимной клин выполнен с упорами рабочего и обратного одов, выполненных соответственно в виде упругого элемента и пальца, контактирующих поочередно йо свободным концом рычага.
2.Устройство по п.1, о т л. ичающееся тем, что, с целью снижения нагрузки на силовой цилиндр, упоры рабочего и йб|эатного ходов одн.ого клина установлены относительно упоров, другого клина на различном расстоянии.
3.Устройство по ПП.1 и 2, о тл и Ч а ю Щ ё е с я тем, что упру
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для крепления формы к подвижной раме виброплошадки | 1977 |
|
SU637254A1 |
| Устройство для крепления формы к подвижной раме виброплощадки | 1978 |
|
SU779070A1 |
| ОРГАН НАДЕЖНОГО ПЕРЕМЕЩЕНИЯ СОЕДИНИТЕЛЕЙ ЭЛЕКТРОЛИЗНЫХ ЯЧЕЕК, ПРЕДНАЗНАЧЕННЫХ ДЛЯ ПРОИЗВОДСТВА АЛЮМИНИЯ | 2011 |
|
RU2587103C2 |
| ЗАЖИМНОЕ УСТРОЙСТВО | 2017 |
|
RU2729678C1 |
| Устройство для крепления формы к виброплощадке | 1977 |
|
SU622676A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| МАШИНА ДЛЯ КОНТАКТНОЙ СТЫКОВОЙ СВАРКИ РЕЛЬСОВ | 1998 |
|
RU2186664C2 |
| ЗАЖИМНОЕ УСТРОЙСТВО | 2016 |
|
RU2688970C2 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| ЗАЖИМНОЕ УСТРОЙСТВО | 2008 |
|
RU2432251C2 |
