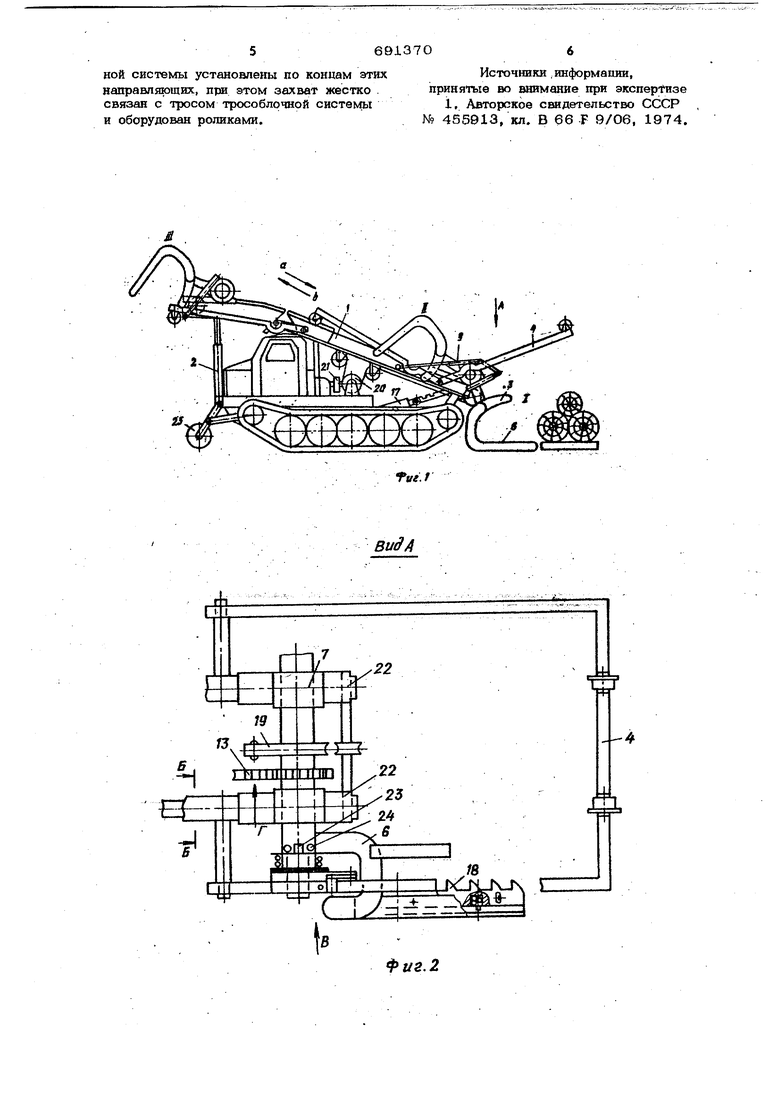
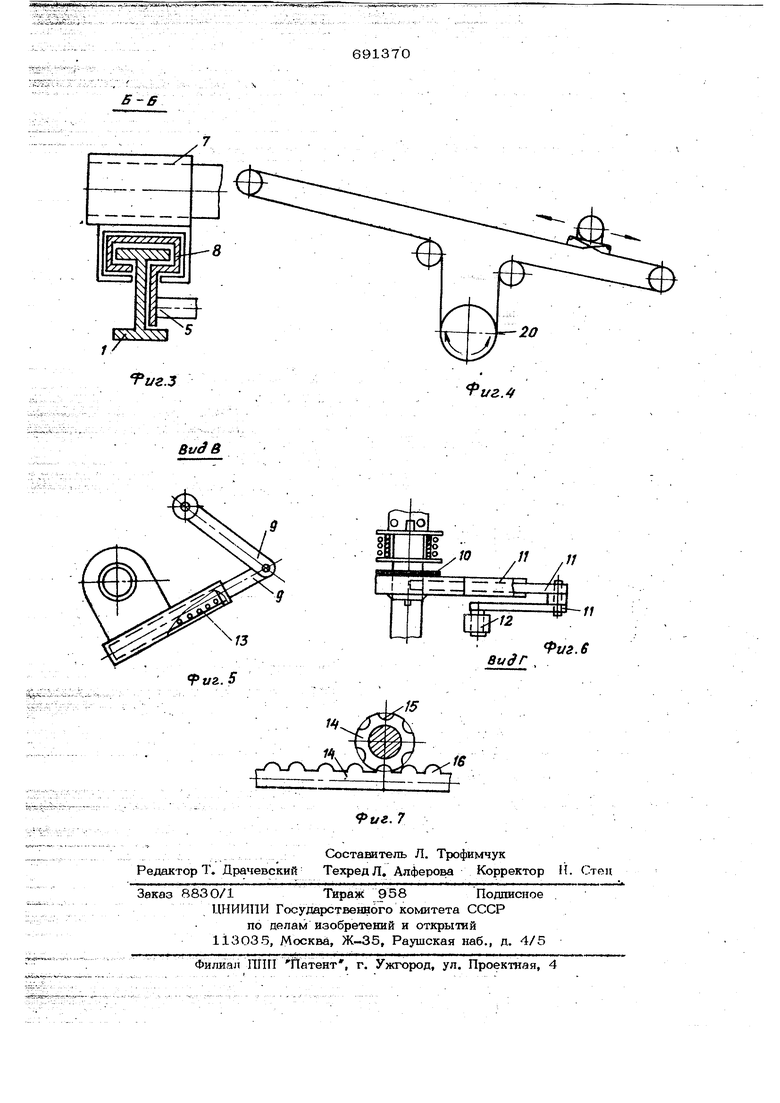
Данное изобретение относится к уст- ройствам, осуществляющим трелевку и погрузку деревьев на транспортньхе средства, которые могут быть использованы в лесной и деревообрабатывающей промыш ленности. Известно устройство для трелевки и погрузки деревьев, содержащее самоходное шасси, несущее раму, на которой установлена кабина управления, захват, вьшолненный с двумя поворотными посредством привода челюстями, и механизм перемещения захвата, включающий в себя лебедку и трособлочнуюсистему П ТНедостаток известного устройства заключается в его низкой эффективности. Целью данного изобретения является повышение эффективности работы устройства. Достигается это тем, что на раме установлены направляющие для перемещения в них захвата, а блоки трособлочной .системы установлонт,( по концам этих нап оавляющих, при этом чахват жестко свяЗан с тросом трособлочной системы я оборудован роликами. На фиг. 1 изображено устройство для трелевки и погрузкн деревьев; на |яг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2j на фиг. 4 -, схема запасовки каната; на фиг. 5 - вид В на фиг. 2; на фиг. 6 - то же, вид сверху; на фиг, 7 - вид Г на фиг. 2. Устройство состоит из двух наклонных рельсов 1, закрепленньпс на шасси, передние части рельсов шарнирно соединены с основными и опираются на штоки гидроцилиндров 2. Гидроцилиндры обеспечивают подъем и опуекание частей рельсов , в широких пределах. В нейтральном положении части (при прекращении подачи масла в гилроцилиндр) устанавливаются так, что одна является продолжением другой, что достигается за счет пружин, пометенных в гидроцилиндре 2. По рельсам перемещается захват 3 с верхней челюстььэ 4 ((юрма рамки). Концы челюсти 4 шарнирно соединены с ползунами 5, охватывающими рельр 1. Нижняя челюсть 6 поворачивается во втулках 7, соединенных с ползунами 8, охватывающими ползуны 5 верхней челюс ти. Связь челюстей осуществляется за счет механизма 9.Механизм 9 состоит из постоянно замкнутой муфты сцепления 10, рычажного звена 11с роликом 12 на конце, часть 13 рычансного звена телескопическая со спиральной пружиной Поворот захвата осуществляется рееч ным механизмом 14, Шестерня 15 закреплена на валу челюсти 6. Рейка 16 нходит в зацепление с шестерней 15 и управляется гидроцили дром 17. В челюсти 6 имеются две зуб чатые рейки 18 для зацепления верхней и нижней челюстей захвата. Звено 19 служит для присоединения концов каната Захват перемещается с помощью лебедки 20, связь захвата с лебедкой канатная. Крутящий момент на лебедку 20 пе-. редается через муфту сцепления 21. Управление муфтой 21 электрическое. В корпусе муфты установлен электромагнит ный тормоз. В машине предусматриваетс я несколько электрических выключателей начала и конца ряда операций. Имеются упоры 22, 23 и 24. Для устойчивости устройства в момент разгрузки предусмотрен аутригер 25. Работает устройство следующим образом. Челюсти 4 и 6 в расцепленном состоянии с помощью лебедки 20 двигаются для загрузки в направлении стрелки а . Ползуны 5 и 8 упираются в упоры 22, при этом нажимают на конечнью выключатели - отключается муфта 21 и сразу же затормаживается лебедка 2О, одновременно включается гидрораспределитель и подается масло в механизм 14, Шток втягивается н peitка 16 .механизма 14 входит в зацеплени с шестерней 15. Поворачивается челюсть 6 и через механизм 9 разворачивается челюсть 4, Которая ложится на конец вала челюсти 6 и удерживается в этом положении за счет муфты 10 и рычажного звена 11. Резкий разворот челюсти 6 отключает подачу Масла в одну из полостей цилиндра 17 Челюсть. 6 развернулась, слегка касаясь грунта, и в этот момент осущесч вляетс я загрузка хлыстами (положение 1 Подача масла в другую полость цилиндра 17 (выполняет оператор) разворачивает челюсть 6 (вверх по окружности). Здесь наблюдается автономный поворот челюсти 6. Свободный поворот челюсти 6 обеспечивают упоры 23 и 24, 23 - на муфте 10, а 24 - на валу челюсти 6. За счет свободного хода зубчатые рейки 18 войдут в зацепление с боковыми частями челюсти 4. После этого замкнутый захват поворачивается как одно целое и займет положение ji . Рейка 16 вькодит из зацепления с шестерней 15. Включаем лебедку 20 на обратный ход, включением муфты 21 и отключением тормоза захват 3перемещается вверх по рельсам (в направлении стрелки в.). При дальнейшем движении захвата 3, ролики челюсти 6 скатываются с рельсов, ползун 5 доходит до конечного упора, а ползун 8 будет перемещаться. Боковые части челюсти 4выйдут из зацепления с зубчатьхми рейками 18 челюсти 6, которая двигаясь дальше, будет разгружать захват (положение IJJ ). В момент перехода захвата с грузом на подвижные концы рельсов можно при необходимости изменять высоту разгрузки. Разгруженный захват за счет пружин, смонтированных в гидроцилиндры 2, перемещается так, что части рельсов устанавливаются на одной прямой. Во втулках 7 смонтированы пружинные демпферы, которые заставят челюсть 6 несколько развернуться в обратном направлении (после разгрузки), тогда за счет мехашзма 9 челюсть 4 поднимается до уровня рельсов. Включением лебедки 20 На обратный ход расцепленные челюсти захвата будут двигаться за следующей пачкой деревьев. Формула изобре тения Устройствб для трелевки и погрузки деревьев, содержащее самоходное щасси, есущее раму, на которой установленй кабина управления, захват, вьшолненный с двумя поворотными посредством;- привода челюстями, и механизм пермещения захвата, включающий в себя лебедку и трособлочную систему, отличаюееся тем, что, с целью повышения эффективности работы устройства, на раме установлены направляющие для перемеения в них захвата, а блоки трособлпч56913706
ной системы установлены по концам этихИсточники . информации,
направляющих, при этом захват жестко .
связан с тросом ТрОСоблрЧНОЙ CHCTSIvJbi
и оборудован роликами.
принятые во внимание при aKcneptHse
1, Авторское свидетельство СССР № 455913, кл. В 66 F 9/06, 1974.

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для перевозки длинномерных грузов | 1980 |
|
SU944960A1 |
| ТРЕЛЕВОЧНО-ПОГРУЗОЧНАЯ МАШИНА | 2010 |
|
RU2440288C1 |
| Способ бесчокерной трелевки деревьев и устройство для его осуществления | 1977 |
|
SU695931A1 |
| Транспортное средство для бесчокерной трелевки деревьев | 1981 |
|
SU981041A1 |
| Транспортное средство для сбора и трелевки древесины | 1987 |
|
SU1452729A1 |
| Транспортное средство для формирования и перевозки пачки длинномерных грузов | 1981 |
|
SU988608A1 |
| МАШИНА ДЛЯ БЕСЧОКЕРНОй ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1973 |
|
SU405504A1 |
| НАВЕСНОЕ УСТРОЙСТВО ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ДРЕВЕСИНЫ | 1971 |
|
SU426958A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ПАЧКИ ДЕРЕВЬЕВ | 2004 |
|
RU2258027C1 |
| Устройство для захвата и трелевки деревьев | 1990 |
|
SU1757933A1 |
ВидА
ix-q
Фиг. 2
