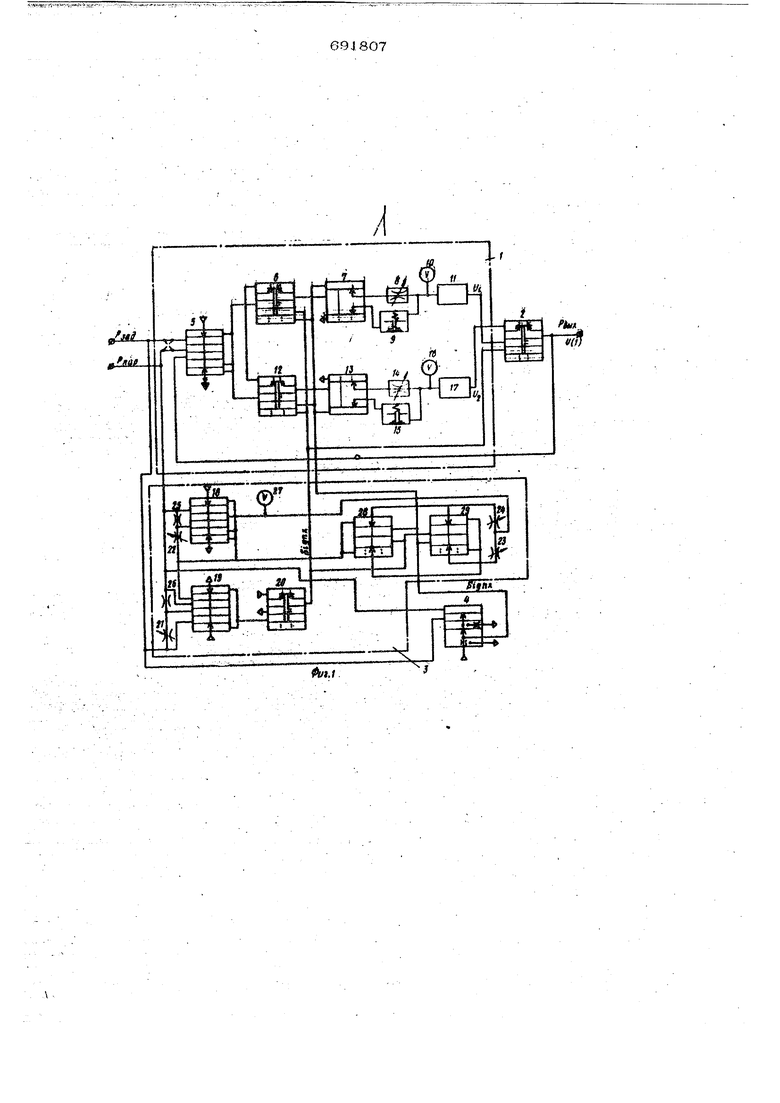
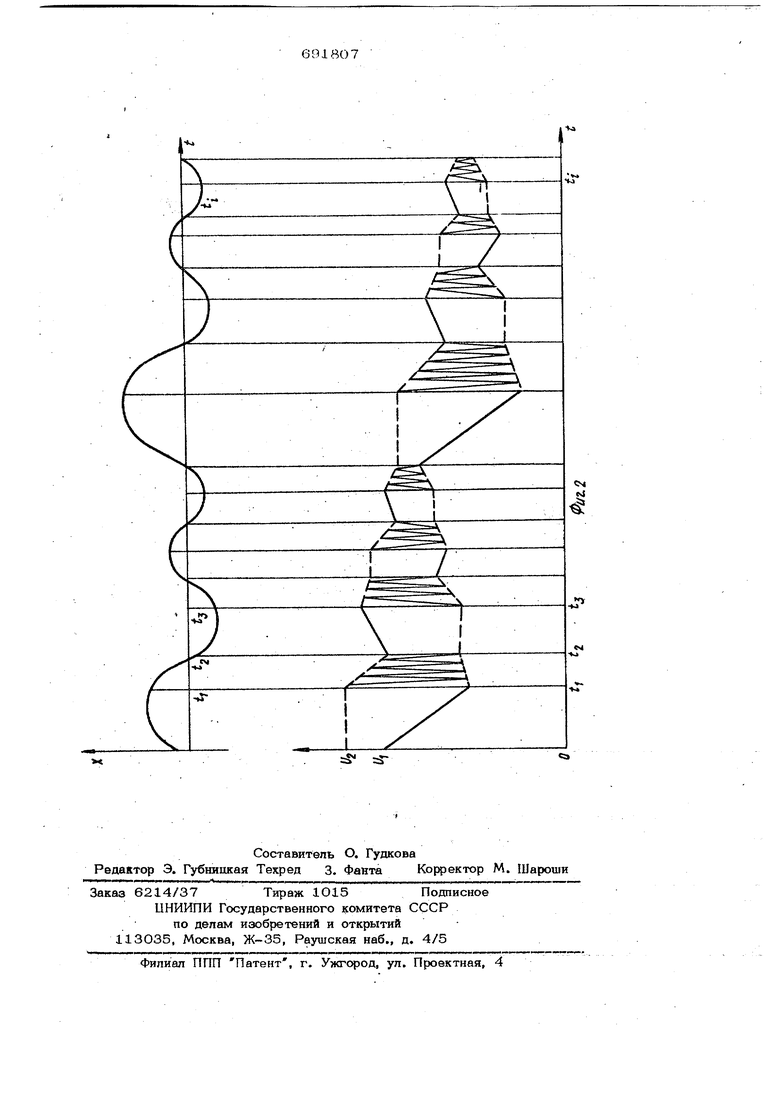
Это достигается благодаря Тому, что в нем каждый интегратор формирователя управляющего воздействия содержит элемент памяти и. обратный клапан, подключенный параллельно переменному дросселю, ггричём первые управляющие входы элементов памяти соединены между собой а выходы подключены к управляющим вхо дам ключей обоих интеграторов, причем въгходы сигнум-реле и реле блока определения знака производной подключены к другим управляющим входам элементов памяти. Дополнительным отличием являет ся то, что с целью повышения быстродействия устройства, в блоке бпрёдеПения знак производной установлены переключатель с параллельным регулируемым дросселем вход перекпюча теля подключен к выходу Другого элемента сравнения, а средняя точка регулируемого дросселя подключейа к управляющему входу данного элемен та сравнения. Схема регулятора представлена на фиг. 1, а на фиг. 2 - график его работы Регулятор содержит формирователь управляющего воздействия 1, ключ выходной 2, блок определения знака производной 3 и сигнум-реле 4. Рходы формирователя управляющего воздействия 1 соединены с входными каналами регулируемой величины параметра - f,ap и задания - РЗОД Формирователь управляющего воздействия 1 состоит из двух HHtet patopuB, имеющих элемент .сравнения 5, и каждый из которых включает элемент памяти 6, ключ 7, переменный дроссель 8, обратный клапан 9, ёмкость, 10 и усилитель 11. Второй интегратор BbinonneBf аналогично и состоит- из эл еМёнта памяти 12, ключа 13, переменного дросселя 14, обратного клапана 15, емкости 16 и усилителя мощности 17. Блок определения знака производной 3 содержит два элемента сра1внения 18 и 19, реле 20, четыре переменных дросселя 21, 22, 23, 24, два постранных дрос селя 25 и 26, причем дроссели 21, 22, 25, 26 образуют дроссельные делители, емкость 2 7 и переключатель, состр5шщй из двух трехмембраннь1х реле 28, 29, В качестве сигнум-реле 4 используется дис ретный элемент сравнения. Дроссели 23, 24 образуют регулируемый дроссель, параллельно В1(люченнь1й переключателю. Устройство работает следующим обрй-адм I Сигналы, пропорциональные заданному Р,.дИ текущему значениям Р,,др регулируемой величины, поступают на гжоды элемента сравнения 5, работающего в зависимости от положения элементов памяти 6 и 12, а также ключей 7 и 13, управляемых блоком определения знака производной 3 и сигнум-реле 4, попеременно . в режиме интегрирования и запоминания. В обратную связь элемента 5 в зависимости от положения выходного ключа 2, управляемого блоком 3, подключается выход первого или второго интегра-гора. Если знак функции блока 3 Sigfti X О а.знак функции сигнум-реле Sig (0это случай, когда параметр находится в первом квадранте изменения параметра, элемент сравнения 5 подключается через элемент памяти 6 и ключ 7 к инерционному звену дроссель-емкость (элементы 8, 10) и в первом интеграторе производится операция интегрирования ошибгки. II - - V . Т, J ха-ь Эта величина через выходной ключ подается на Чвыхрд устройства ив положительную обратную связь этого же интегратора. Одновременно от элемента сравнения 5 посредством элемента 12 отключено инерционное звено, элементы 14 и 16, второго интегратора. Если SiVnx O,a Slg (параметр находится во втором квадранте) элемент сравнения 5 отключен от инерционных звеньев, а формируется канал связи между инерционными звеньями, в результате чего происходит перетек из емкости 16 через обрат1п 1й клапан 15 и дроссель 8 в емкость 1О. В пределе давления в емкостях выравниваются, стремясь к срё)знёй величине этих давлений. В блоке определения знака производной реализуется операция Т-..Гр .0 di 501 дЬ Т Дт,если (iE-x o ,еслив1|гн Сх-хКО, универсальное реле 20 определяет знак этой величины. Переключатель, сформированный на трехмембранных реле 28, 29, осуществляет подключение в дроссельную обратную связь элемента сравнения 18 дросселя 23, если812 п(ХХ)Ои 24 если (X-х) Опричем проводимость дросселя 23 больше проводимости дросселя 24. 56 Эгим самым обеспечивается быстродействие и чёткость работы блока. Дискретный элемент сравнения 4 формирует инверсный знак ошибки рассогласования. Формирование выходного сигнала производится по следующему закону: U(,eCAMsi§fi C-t если sig-tt Управляющее устройство формирует управляющее воздействие из двух уровней разность значений которых уменьшается при движении параметра к линии задания sigH(xxJ и увеличивается при отклонении параметра от линии задания signfxxXО при этом изменяется выход того интегратора, который соединен с выходным каналом устройства, а выход другого запомнен, этим самым достигается возможност скомпенсировать частые воздействия больших возмущений за счет наличия двух переменных уровней, образующих управляю щее воздействие. По сравнению с известными предлагаемое устройство позволяет повысить качество регулирования технологических процессов и увеличить быстродействие и четкость работы бпока опредепения знака производной при больших постоянных времени объекта регупирования. Использование предложенного устрой- .,,t- WJ ства эффективно в системах автоматичеокого управления колебательным технологическим процессами, в которых при уменьшении амплитуды колебания частота увепичи1аается. Формула изобретения 1. Пневматическое управляющее yctiройство, содержащее сигнум-реле, подключенное к каналам параметра и задания, ключ, выход которого является выходным каналом устройства, формирователь управляющего воздействия, состоящий из подключенного к входным каналам параметра 7 и задания элемента сравнения и двух интеграторов, включающих последовательно соединенные ключ, переменный дроссель, емкость и усилитель, выходы усилителей интеграторов соединены с управляющими камерами ключа устройства, а выход сигнум-реле соединен с управляющими входами ключей обоих интеграторов, и блок определения знака производной, состоящий из подключенных к входным каналам параметра к задания элементов сравнения с дроссельными делителями, реле, которое подключено к выходу одного из элементов сравнения, выход реле блока определения знака производной соединен с одной из управляющих камер ключа устройства, отличающее с я тем, что с целью улучшения динамических характеристик устройства, в нем каждый интегратор формирователя управляющего воздействия содержит элемент памяти % обратный кпапан, подключенный параллельно переменному дросселю, причем первые управляющие входы элементов памяти соединены между собой, а выходы подключены к управляющим входам ключей обоих интеграторов, причем выходы сигнум-репе и репе блока определения знака производной подключены к другим управляющим входам элементов памяти. 2. Устройство по п. 1, о т п и ч а е е с я тем, что, с целью повышения быстродействия устройства, в нем, в бпоjjg определения знака производной установ.. „ переключатель с параппепьным регу„„руемым дросселем, вход перекпючатепя подключен к выходу другого элемента сравнения, а средняя точка регулируемого дросселя подключена к управляющему вхо.ду данного элемента сравнения. Источники информации, принятые во внимание при экспертизе 1.Козлов В. И. Самонастраивающаяся система с репейными элементами, М., Энергия, 1974., с. 434. 2.Заявка № 2309926/24 кл. G О5 В 13/00, от О4.01.76, по которой принято положитепьное решение о выдаче авторского свидетельства {прото 5 Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое регулирующее устройство | 1979 |
|
SU868703A1 |
| Пневматическое регулирующее устройст-BO | 1978 |
|
SU802920A1 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU640254A1 |
| Пневматический самонастраивающийся регулятор | 1976 |
|
SU590693A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1965 |
|
SU174866A1 |
| Пневматическое устройство управления | 1976 |
|
SU632987A1 |
| Пневматический регулятор | 1979 |
|
SU849140A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |