(54) ПНЕВМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое регулирующее устройст-BO | 1978 |
|
SU802920A1 |
| Пневматическое управляющее устройство | 1977 |
|
SU691807A1 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU640254A1 |
| Пневматический самонастраивающийся регулятор | 1976 |
|
SU590693A1 |
| Пневматическое устройство управления | 1976 |
|
SU632987A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Система автоматического управления двухсвязным объектом | 1983 |
|
SU1158973A1 |
| Пневматическое компенсирующее устройство | 1977 |
|
SU705416A1 |
| Пневматический регулятор | 1979 |
|
SU849140A1 |
1
Изобретение относится к пневматическому приборостроению и может быть использовано при синтезе самонастраивающихся систем для автоматического управления технологическими процессами.
Известны самонастраивающиеся системы, сод ержаицие в качестве регулятора управлякмцие устройства, имеющие в своем составе интегратор и анализатор качества 1.
Однако известные устройства обладаиот недостаточной точностью регулирования колебательных процессов.
Наиболее близким к предлагаемому является пневматическое управляющее устройство, содержащее сигнум-реле, подключенное к каналам параметра и задания, ключ, выход которого является выходным каналом устройства, формирователь регулируккцего воздействия, состоящий КЗ подключенного к входным каналам параметра и задания элемента сравнения и двух- интеграторов включающих последовательно соединенные элемент памяти, переменный дроссель, емкость и усилитель, выходы усилителей интеграторов соединены с входными камерами ключа, а выход сигнум-реле и блока определения знана производной соединены с управляющими входами элементов памяти обоих интеграторов, первые входы элементов, памяти соединены между собой, а вторые - с выходами элемента иравнения формирователя регулирующего воздействия, блок определения знака производной состоит из подключенных к (ВХОДНЫМ каналам параметра и задания
10 элементов сравнения с дроссельными делителями, переключателя с параллельным регулируемым дросселем, вход переключателя подключен к выходу первого элемента сравнения, а средняя
15 точка регулируемого дросселя соединена с управляющим входом данного элемента сравнения, вход второго элемента сравнения блока определения знака производной соединен с входным
20 каналом задания, выход блока определения знака производной соединен с одной из управляйщих камер ключа {2.
Однако визвестном устройстве при отработке сложных входных воздействий
25 во время управления колебательными объектами с запаздыванием возможно ухудшение качества регулирования по причине недостаточной чувствитель, ности блока определения знака производной к малым изменениям регулируе30
мого параметра в управляемом устройстве, что ухудшает его динамические характеристики.
Цель изобретения - улучшение динамических характеристик устройства.
Указанная цель достигается тем, что в блок определения знака производной введен элемент памяти,,, а B;.I устройство - генератор, выход которого соединен с управляющим входом элемента памяти блока определения знака производной, второй управляющий вход данного элемента памяти подключен к каналу задания, вход элемента памяти соединен с каналами параметра, а выход соединен с одним из выходов элемента сравнения блока определения знака производной.
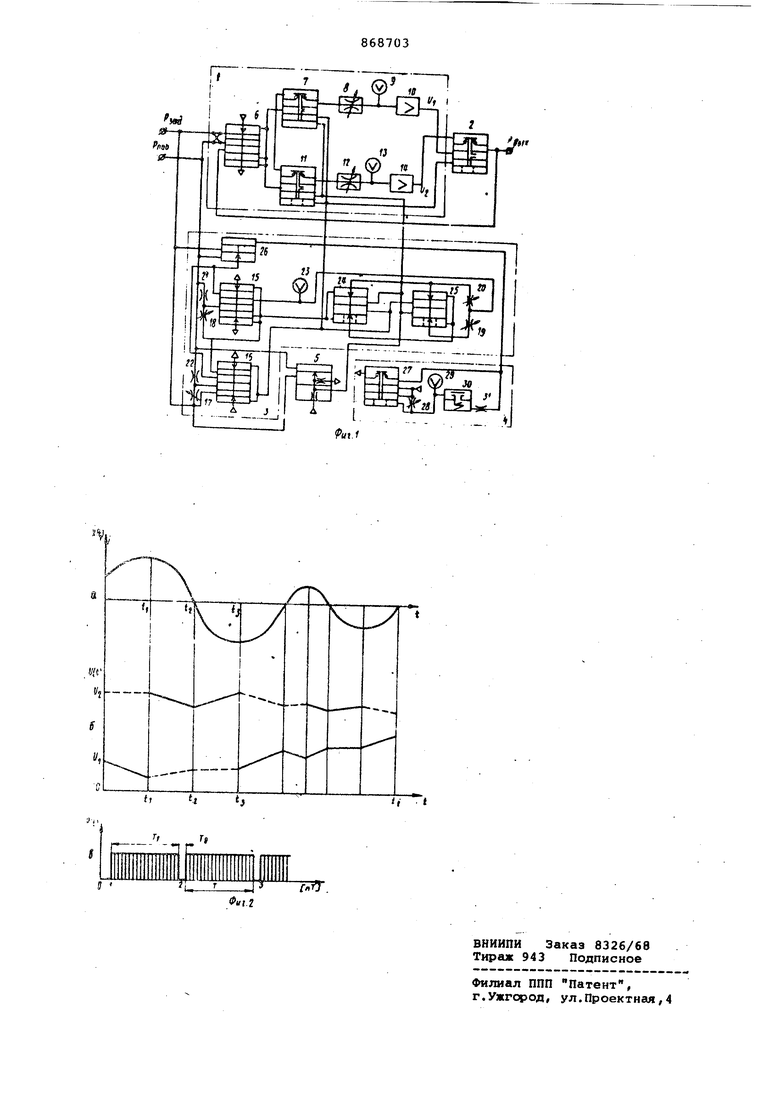
На фиг. 1 представлена схема предлагаемого устройства; на фиг. 2 график его работы.
Регулятор содержит формирователь 1 управляющего воздействия, ключ 2, блок 3 определения знака производной, генератор 4 и сигнум-реле 5. Входы формирователя 1 управляющего воздействия соединены с входными каналами (регулируемой величины) параметра РрдрИ задания Р,о,.
Формирователь 1 управляющего воздействия состоит из элемента 6 сравнения и из двух интеграторов, первый из которых включает элемент 7 памяти, переменный дроссель 8, емкость 9 и усилитель 10- Второй интегратор выполнен аналогично первому и состоит из элемента 11 памяти, переменного дросселя 12, емкости 13 и усилителя 14.
Блок 3 определения знака производной содержит два элемента 15 и 16 сравнения, четыре переменных дросселя 17 - 20, два постоянных дросселя 21 и 22, причем дроссели 17, 18, 21 и 22 образуют дроссельные делители, ёмкость 23, переключатель, состоящий из двух.трехмембранных реле 24 и 25 и элемента 26 памяти. Дроссели 19 и 20 образуют регулируемый дроссель, включенный параллельно переключателю .
Генератор 4 состоит из универсального элемента 27, переменного дросселя 28, емкости 29, обратного клапана 30 и постоянного дросселя 31. В качестве сигнум-реле 5 используется дискретный элемент сравнения.
Устройство работает следукидим образом.
Сигналы, пропорциональные заданному и текущему значениям регулируемой величины, поступают-на входы элемента б, сравнения, работающего в зависимости от положения элементов 7 и 11 памяти, управляемых блоком 3 определения знака производной и сигнум-реле 5, попеременного в режиме интегрирования и запоминания. В обратную связь элемента
б в зависимости от положения выходного ключа 2, управляемого блоком 3, подключается выход первого или второго интегратора.
Если знак функции блока 3 J sign X О, а знак функции сигмумреле sign , это случай, когда параметр находится в первом квадранте изменения параметра, элемент б сравнения подключается через элемент 7 Q памяти к инерционному звену дроссельёмкость (элементы 8 и 9) ив первом интеграторе производится операция интегрирования ошибки
1
5 U y-Jxdt t
Эта величина через выходной ключ , подается на выход устройства и в положительную обратную связь этого же
0 интггоатооа.
Одновременно от элемента 6 сравнения посредством элемента 11 отключено (Инерционное звено(элементы 12 и 13 второго интегратора).Если .sign ,а
5 sign X О (параметр находится во
втором квадранте) элемент б сравнения отключен от инерционных звеньев, а формируется канал связи между инерционными звеньями, в результате чего
Q происходит перетек из емкости 13 через дроссели 12 и 8 и емкость 9. В пределе давления в емкостях выравниваются, стремясь к средней величине этих давлений.
C В блоке определения знака производной реализуется операция
(Рпар-Р,ав.
(Тд.еслм 5ig-MC,x)o j
гпе 1 igTt (5t) о i
Pnqp Р (nl) t nt + tT .
Знак этой величины определяется элементом 16 Е непреЕ 1Вно нарастает от
О до 1 в каждом такте до наступления следующего такта (фиг. 2в). Запоминание переменной величины осуществляется посредством элемента 26 памяти, которйлй управляется генератором 4. Чувствительность узла предварения
повышается за счет скачкообразного изменен 1я переменной величины на его входе в момент стирания памяти (нулевое значение выхода генератора).. Генератор 4 формирует сигнал,
график которого приведен на фиг. 2, а из которого видно, что Т Т.
Дискретный элемент 5 сравнения формирует инверсный знак ошибки рассогласования.
ФоЕииирование выходного сигнала производится по закону
иш JiCti- v),ecAM sign Ято, 0 (t и), если siQfM X о
Регулирующее устройство формирует регулирующее воздействие из двух уровней,, разность значений КОТО1НЛХ уменьшается при движении параметра к линии задания sign (х х)0 и увеличивается при отклонении параметра от линии задания sign(x х)0, при этом изменяется выход того интегратора, который соединен с выходным каналом устройства, а выход другого запомнен.
Предлагаемое устройство по сравнению с известньо4 позволяет повысить (Качество регулирования технологических процессов за счет увеличения чувствительности блока определения знака производной при большом зап&здывании объекта регулирования. Устройство эффективно при использовании ег в системах автоматического регулирования, объекты которых колебательны и имеют большое запаздывание.
Формула изобретения
Пневматическое регулирукяцее уст- 30 ройство, содержа111ее сигнум-реле,подключенное к каналам задания к параметра, ключ, выход которого является выходным каналом устройства, формирователь регулирующего воздействия, 35 состоящий из подключенного к входным канапам параметра и задания элемента сравнения и двух интеграторов, включающих последовательно соединенные элемент пгшяти, переменный дрос- д0 сель, емкость и усилитель, выходы усилителей интеграторов соединены с входными камерами ключа, а выход сигнум-реле и блока определения знака производной соединены с управляющими входами элементов памяти обоих интеграторов, первые входы элементов памяти соединены М1жду собой, вторые - с выходами элемента сравнений формирователя регулирующего воздействия, блок определения знака производной состоит из, подключенных к входному каналу параметра двух элементов сравнения с дроссельными делителями, переключателя с паргшлельньм регулируемым дросселем, вход переключателя подключен к выходу первого элемента сравнения, асредняя точка регули- . руемого дросселя соединена с управляющим входом первого элемента сравнения, вход второго элемента сравнения блока определения знака производной соединен с входнЕл кансшом згщания, а выход блока определения знака производной соединен с одной из управляющих камеры-ключа, о т л и чающеес я тем, что, с целью . улучшения динамических характеристик устройства, в блок определения знака производной введен элемент памяти, а в устройство - генератор,,выход которого соединен с управляющим входбм элемента памяти блока определения знака производной, второй управляющий вход данного элемента памяти соединен с каналом задания, вход элемента памяти подключен к каналу; параметра, а его выход соединен с одним из входов элемента сравнения блока определения знака производной.
Источники информации, приня -ые во внимание при экспертизе
-1. Козлов В.И. Самонастраивающиеся .системы с релейными элементами. Энергия, 1974, с.-Л34.
t f|h
Ч I
