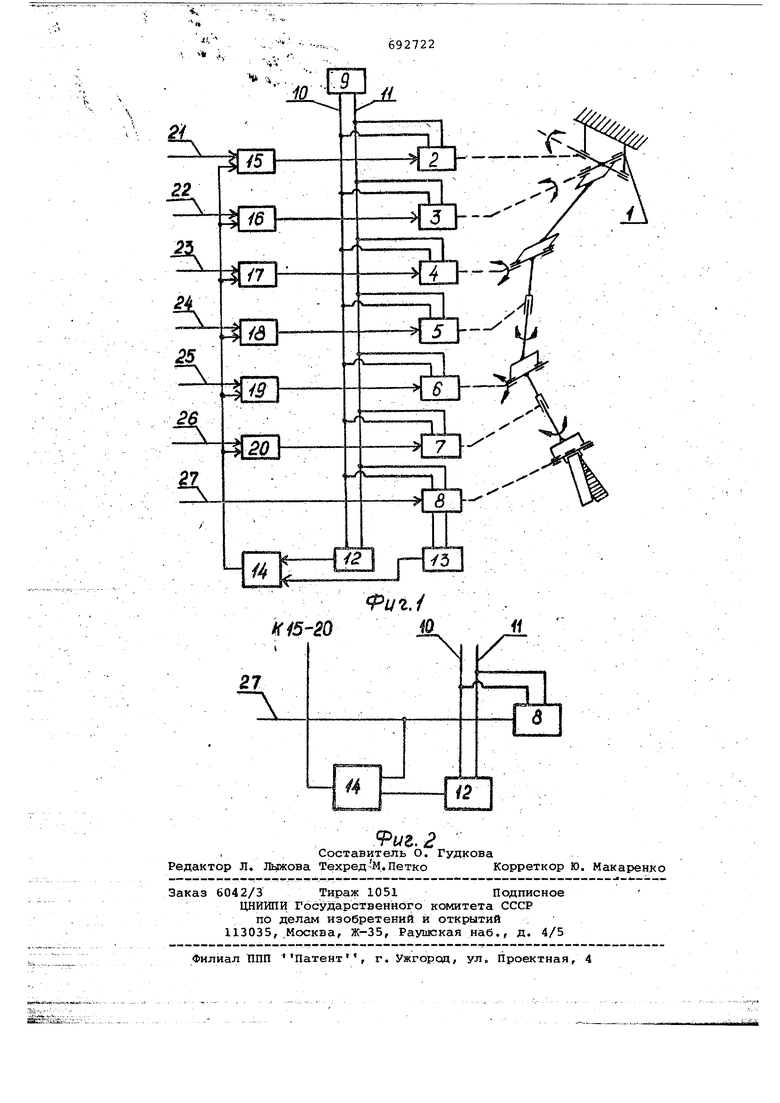
1. ..Изобретение относится к испопни1гельным системам управления м рнипуляторов, в особенности гйдравличес ких подводных манипуляторов. Йзвестны исполнительные системы управления манипулятором, содержащи исполнительный механизм с электрогидравлическими приводами звеньев, гидропитание которых осуществляется ,от одного источника питания 1. : Наиболее близким техническим решением к изобретению является;устtJoftCTBO для управления манипуляторо содержащее гидроприводы степеней подвижности и гидропривод захвата, источник питания, подк-пюченный маги ралями напора и слива к гидроприводам степеней подвижности, и входные управляющие каналы 2. Недостаток устройства управления большая мощность источника гидропитания, обеспечивающая работу всех приводов под полной нагрузкой с мак симальной скоростью- с учетом потерь энергии в трубопроводах и каналах. При снижении мощности источника гид ропитания появляется риск выронить груз при выполнении рабочих операци с полными скоростями. - , ... . Другим недбстатком такого устройства является большой вес и габариты ис полни ёльнсзго механизма, так как гйдрЪдвигатель губок схёата,рассчитываемый на пониженное давление питания из-за падающей статической характеристики источника гидобпитаниЯ и потерь давлейия в Ntaiй :тpaляx напора и слива, имеет бо.льшйе; гаёар;иты и sec, и вследствие этого остальные приводы также иМейт большие габариты и вес. - Цель изобретения -;;снйЖение энергопотребления и упрощение устройства. Это достигается тем, чтр в,нем установлены датчик разности дав-пений в магистралях иапора и слива, регуляторы коэффициентов передачи управлякндих каналов и корректирующий блок, первый вход которого подключен к выходу датчика разности давлений в магистра-лях напора и слива, а вы- ход - к входам регуляторов коэффициентов передачи управляющих кангьпов, другие входы,которых соединены с входными управляющими каналами, а выходы - с входами гидроприводов степеней подвижности. Кроме того, второй вход корректирующего блока соединен с входным управляющим каналом гидропривода захвата, или на приводе захвата установлен датчик разности давлений, выход которого подключен к второму входу корректирующего блока. На фиг. 1 изображена структурная хема устройства для управления манипулятором; на фиг. 2 - структурная схема варианта подключения корректирующего блока при пропорциональном управлении усилием .захватд. Устройство для управления предСтавляет собой нижний уровень иерар .хической системы управления манипулятором, включающий исполнительный механизм 1 с шестью степенями свободы. Устройство содержит гидроприводы 2-7- степеней подвижности и гидро привод 8 захвата исполнительного механизма . 1 . К каждому гидроприводу подведено гидропитаниё от источника питания 9,по магистралям напора 10 и слива 11. К магистралям напора 10 и слива 11 присоединен датчик 12 раз нести давлений, К полостям гидродвигателя гидропривода 8 захвата присое динен датчик 13 разности давлений .Вы ходы датчиков 12 и 13 подключены к входам корректирующего блока 14, выход которого соединен с входами ре-. гуляторов 15-20 коэффициентов передачи выходы .которых соединены с вхо дами гидроприводов 2-7, а вторые вхо дй С взводными .управляющими каналами 2,1-26. Управляющий канал 27 соединен непосредственно с входом гидропривода В з.ахвата. . . Гидроприводы 2-7, например, выполнени из- последовательно соёдиненных электрического усилителя, электрогидравлического усилителя с обратной связью по расходу для осущест вления пропорционального управления по скорости и гидродвигателя типа сдвоенных гидроцилиндров с передачей рейка-шестерня. Гидропривод 8 захвата, например, выполнб;н из соединенных последовательно электрического усилителя, электрогидравлического усилителя с отрицательным перекрытием для обеспечения прбпорционального управления усилием захвата и гидродвигателя типа сдвоенных гидроцилиндров с пере дачей типа рейка-шестерня .Г--.Датчики 12 и 13 разности давлений например, выполнены в виде подпружиненного золотника, связанного с реостатным преобразователем перемещения. Регуляторы 15-20 коэффициентов передачи могут представлять собой множительные устройства, применяемые в аналогичных вычислительных маш нах. Источник гидравлического питания 9, например, выполнен в виде гидрав лического насоса с электроприводом и регулятором давления на выходе. При обеспечении в гидроприводе 8 пропорционального управления усилием захвата исполнительная система управления может быть упрощена , как показансЗ на фиг. 2 (датчик 13 исключен, а второй вход корректирующего блока 14 соединен с входом управляющего канала 27). Устройство для управления манипулятором работает следующим образом. На входные управляющие, каналы . 21-27 поступают управляющие сигналы с верхнего уровня системы управления манипулятором. Верхним уровнем системы управления м,ржет быть система задания и преобразования координат непосредственно задающего органа копирующего манипулятора или системы задания рукойтки управ,ления астатического типа с последующим преобразованием координат задающего органа в координаты Звеньев исполнительного механизма, или система задания и переработки инф,ормации с последующим преобразованием координат задающего органа в координаты звеньев исполнительного механизма, или система задания и переработки информации с последующим преобразованием в координаты эвеньеов исполнительного механизма в полуавтоматическом или автоматическом манипуляторе. Входнь1е управляющие сигналы проходят на входы гидроприводов 2-7 че- рез регуляторы коэффициентов передачи 15-20 с одинаковыми коэффициентами передачи, например К 1, который , соответствует величинам сигналов на вторых входах регуляторов 15-20, равных UfeHx.o Соответственно входным сигналам следящие гидроприводы 2-7 развивают скорости и, следовательно, потребляют соответствующие расходы рабочей жидкости. Возникновение расхода рабочей жидкости в магистралях напора 10 и слива 11 приводит к уменьшению разности давления в них, вследствие падающей статической характеристики источника 9 гидропитания и гидравлических потерь давления. Выходной сигнал и с датчика 12, измеряющего разность давлений в магистралгх напора 10 и слива 11, поступает вход корректирующего блока 14, где сравнивается с выходньли сигналом Uj, датчика 13, измеряющего разность давлений,в полостях двигателя гидропривода 8, соответствующую усилию схвата, развиваемого для удержания груза.. В корректирующем блоке реализуется следующая функция при и,(к-ив,,х 11 . , BMx-Tkt. при 0 0 -U2 1|KUB,,, при U -UgSO Ui--U2при1 и Ua-UsL ..npHU2 U2° тде выходной сигнал блока 14 j - верхний предел выходного сигнала К - постоян ный коэффициент. Величина 1/К идмх для достижения большего эффекта по заявке должна устанавливаться при настройке сиетемы минимально возможной. Если при уменьшении разности давлений в магистралях напораЮ и слива 11 разность U2 становится меньше 1/К ивыи,,то выходной сигнал , блока 14 становится меньше Uaoii.ot Сигнал UBI,I поступая на входы регуляторов l5-20 коэффициентов передачи уменьшает коэффициенты передачи (Ку,1), что :приводит к уменьшению величин сигналов на входах гидроприв дов 2-7 и, соответственно, к снижению их скоростей движения и потребля емых расходов рабочей жидкости. Для нормальной работы гидроприводов 2-8 целесообразно ограничить максимальное значение разности давления в магистралях 10 и 11. Это соответствует в блоке 14 ограничению сигнала величиной Ug. . Если сигнал управления со входа 27, поступающий на вход гидропривода 8 захвата исполнительного Механизма 1, пропорционален усилию захвата, что обеспечивается применением золотника с отрицательным перекрытием, то ;в качестве U2, вместо сигнала с датчика 13 на второй вход корректирующего блока 14 поступает сигнал с вхо ного канала 27 в соответствии со схе мой (см. фиг. 2).. Если управление гидроприводом 8 захвата позиционное и невозможна установка в системе управления датчика 13 разности давлений, сигнал U срав нивается В корректирующем блоке 14 с постоянным сигналом U соответствующим разности давлений в двигате ле при удержании полного груза. в предлагаемой исполнительной сис теме управления источник гидравлического питания может быть рассчитан на обеспечение работы двух и даже одного привода плечевого сустава с максимальной скоростью и с полным грузом в схвате. При этом операции переноса груза могут выполняться с максималь .ными скоростями. Сложные же рабочие операции, требукицие участия большего количества приводов исполнительного механизма, обычно производятся при низких скоростях движения приводов, так что мощность источника питания будет достаточна. Размеры каналов, подводящих гидропитание к приводам исполнительного механизма, выполняются без запаса, в соответствии с расхорами, потребными для нормальной рабо|ты приводов. Площадь поршня двигателя гидропривода 8 захвата также рассчитывается без запаса. Формула изобретения 1.Устройство для управления манипулятором, содержащее, гидроприводы степеней подвижности и гидропривод захвата, источник питания, подключенный магистралями напора и слива к гидроприводам степеней подвижности и гидроприводу захвата, и входные управляющие каналы, отличающе ес я тем, что, с целью снижения энергопотребления и упрощения устройства, в нем установлены датчик разности давлений в магистралях напора и слива, регуляторы коэффициентов передачи управлякяцих каналов и корректирующий блок, первый вход которого подключен к выходу датчика разности давлений в магистралях Hiandipa и слива, а выход - к входам регуляторов коэффициентов передачи управляющих каналов, другие входы которых соединены с входными управляющими каналами/ а выходы - с входами гидроприводов степеней подвижности. . 2.Устройство по П.1, о т л и ч аю щ е е с я тем, что второй вход корректирующего блока соединен с входным управляющим каналом гидропривода захвата. 3.Устройство по П.1,о т л и ч аю щ е е с я тем, что на приводе захвата установлен датчик разности давлений, выход которого подключен к второму входу корректирующего блока. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 271252, кл. В 25 Т 3/04, 2.Теория и устройство манипуляторов,М., Наука, 1973, с. 80 (прототип) .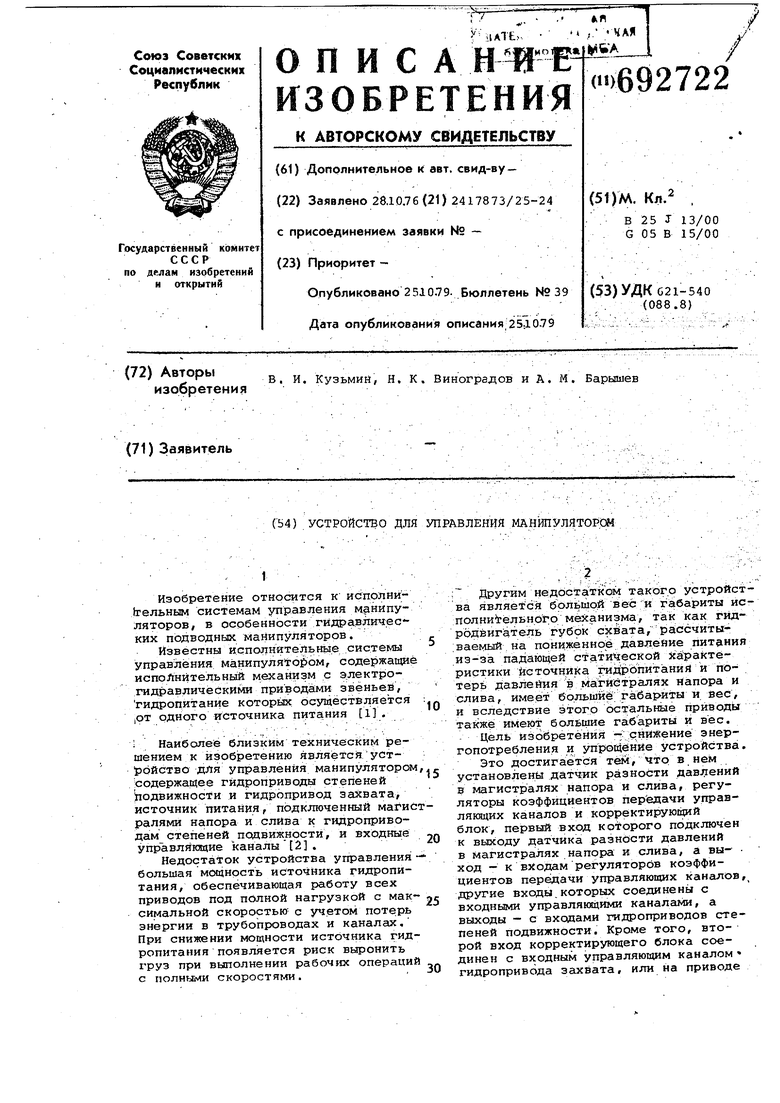
| название | год | авторы | номер документа |
|---|---|---|---|
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |
| ДИНАМИЧЕСКИЙ СТЕНД АВИАЦИОННОГО ТРЕНАЖЕРА | 2011 |
|
RU2486600C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СКОРОСТЯМИ И УГЛАМИ НАВЕДЕНИЯ АРТУСТАНОВКИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203470C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
| СИСТЕМА ГИДРОПИТАНИЯ ИСПЫТАТЕЛЬНОГО СТЕНДА РУЛЕВЫХ ПРИВОДОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2798640C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2230944C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2271306C1 |