(54) СИСТЕМА ПРИБОРНОЙ АЭРОНАВИГАЦИИ
eiiHriV выхода 1Фмй lilTop и Цёпл ейнхроййз а цЙГ 1вЖЙ1 с я MxeSaMr npHfeiviEMKiaVcpCTeMH nocaflKH по приборам ILM и подключены к входа.м блока обработки, а .входы цепи синхронйзадай и широкополосной приемиой цепи являются 1ШвЖШГйй; а тйШё Шй йЗёТТая рйёмиая Цепьсодержитразделительный фильтр, каждый из вьтхОдбв кото pOiPo Через последовательно соединеййь1е смеситель, предварительный усилйтель ло а.рй|фмический усилитель и детектор под Ключёнысоотвётственяо к вз :дд1й су1г1угатЬ ра и компаратора приемника системь досадки.;ДО приборам ILM, вторые входьт смесител.ей объединены исоединейыс ,сЬб гвёгствующим выходом |цепи сиЕхронЙзацин приемлика системы посадки по приборам ILM;a такж-е тем, что широкополосная приемная цепь содвржлт последовательно соединен.ны.е полосовой фильт1р, смеситель, широкололосный предварительный усилитель и разделительный фильтр, каждый из двух выходов которого через лоследрва/гельнр с6ёдйнен,ные логар,ифмйчёскии усилтгёль и детектор подключены.ооотВётствен-но к входам сумматора и компаратора прием.ни.ка системы посадки по приборам ILM.
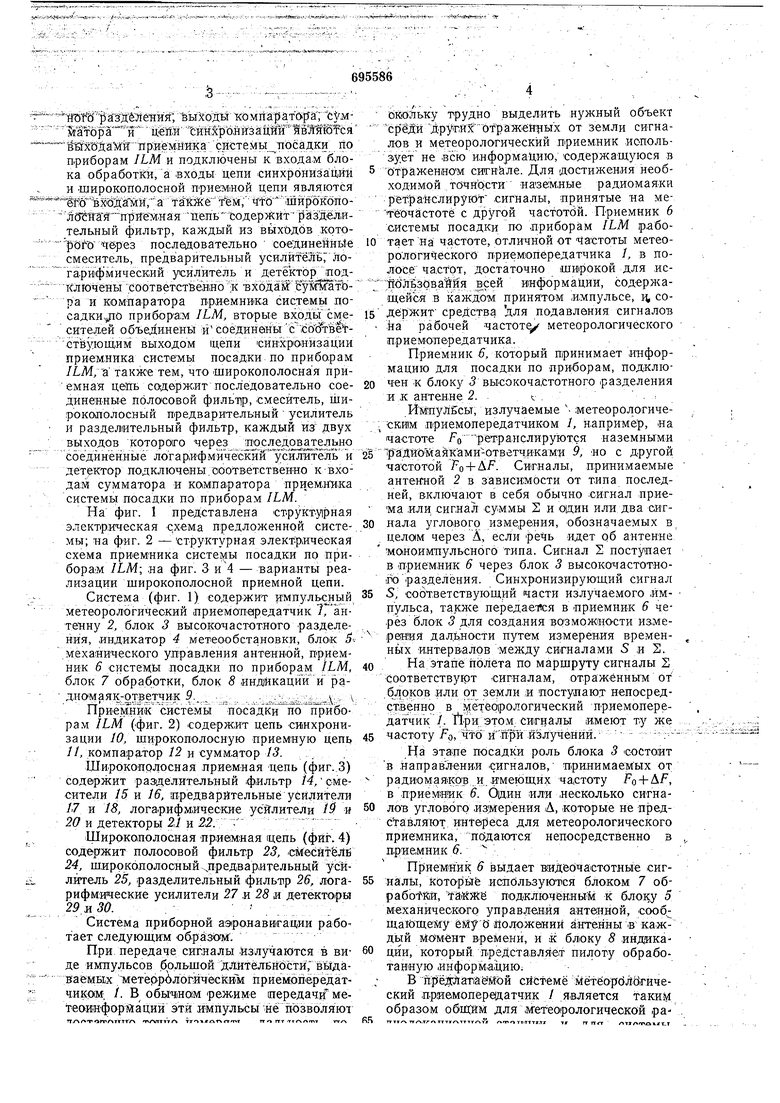
На фиг. 1 представлена структ.урная элект1р;ическая цхема предложенной системы; па ф-иг. 2 -- структурная электрическая схема приемника системы посадки по приборам /LM; .на фиг. 3 и 4 - варианты реализации широкополосной приемной цепи.
Система (фиг. 1) содержит импульсный, метеорологический приемопередатчик 7Гантечну 2, блок 3 высокочастотного разделения, индикатора метеообстановки, блок 3: .мехаяическото управления антенной, приемник 6 системь посадки по приборам /LM, блок 7 обработки, блок 8 индикации и ра диомаякгответчиж 9. .ii : Приемник системы пОСаХки по приборам ILM (.фиг. 2) содержит цепь синхронизации 10, широкополосную приемную цепь //, компара тор 72 и сумм.атор /.
Широкополосная приемная -цепь (фиг. 3) содержит разделительный фильтр /4,смесители 15 и 16, предварительные усилителБ 1,7 и IS, логарифмические усйлители / У 20 и детекторы 2,1 и 22. -
Щирокололосная приемная цепь (фиг. 4)
содержит полосовой фильтр 23, еМесйтёЛй
24, широкблолосный предварительный усйлйтель 25, разделительный фильтр 26, логарифмдаеские усилители 27 и 25 я детекторы
29яЗО.
Система приборной аэронавигации работает следующим образоад.
При передаче сигналы .Излучаются в виде импульсов большой дЛитёленостй, вьща: наемых метеррблогйческиГм приемойёредатчико(м. /. В обычном реж.име lпepeдaчlf метеоинфорйаций эти импульсы нё позволяю
-С1КО.йьку трудно выделить нужный объект срёдйд.ругИХ йтраж.ен-}1ЫХ от земли сигналов и метеорологический приемник иополь аует не .всю информацию, содержащуюся в 5 Ьтраженном сигнале. Для достижения необходимой .точности наземные радиомаяки ретранслируют .сигналы, принятые на ме Тёочастотё с другой частотбй. Приемник 6 системы посадки по .приборам /LM ip,a6o10 тает На частоте, отличной .от частоты метеорологического приемопередатчика /, в полосе частрт, достаточно широкой для ис;;; :Йо;1 з.рваЙия всей информации, содержа щейся в принято.м импульсе, со15 держит средства для подавления сигналов
йа рабочей частоте/ метеорологического 11рием.опередатчика.
Приемник 5, который принимает информацию для посадки по -приборам, подключен .к блоку 5 высокочастотного разделения и .к антенне 2. . :
Ййпуйьсьт, излучаемые метеорологиче. СКИ1М приемопередатчиком 1, например, на
частоте орет Р ислируются наземными
5 РаДиомаяками-ответч.и.ками Я .но с другой частотой Fo + Af. Сигналы, принимаемые антенной 2 в зависимости от типа последней, включают в себя обычно .сигнал прие ма илц сигнал суммы 2 и один или два с,иг0 нал.а угло.вого измерения, обозначаемых в цел-ам через А, если речь идет об антенне моноимпульсного типа. Сигнал Е поступает в п.рием.ник G через блок 5 высокочастотноторазделения. Синхронизирующий сигнал
5 S; .соответствующей части излучаемого ймпульса, также передаетгся в приемник 6 че.рёз блок для создания возможиости из.ме рения дальности путем измерения временных интервалов между сигналами 5 и S.
0 На этапе йолета по маршруту сигналы Е .соответствуфт сигналам, отраж.енньга от .блоков или от земли .и поступают непосредственно в метеорологический приемопередатчик/. ЛриэтоМ; сигналы имеют ту же
5 ча.стоту FQ, что й.прй излучений. На этапе посадки роль блока 5 состоит в .направлении .сигналов, принимаемых от
- радиомаяшв. и., .имеющих частоту fo-ЬА/, в .приемн ик б. Один или .несколько сигналов углового из лерения Л, которые не представлятот KHtepeca для метеорологического приемника, подаются непосредственно в приемник G.
Приемник 6 выдает видеочастотные сиг5 налы, KOTopiJe испбльзуктся блоком 7 обработки, также подключённьШ к блоку 5 м.еханичес.к.ого управления а.нтенной, .сооб.; щашщему ему б йоложеяии йнтенны .в каждь1й момент времени, и к блоку 5 индика0 цйи, который преДста.вЛя.ет пилоту обработанную информа|ЦИЮ;
В йрё йапашой системе lilётёорбЛЙгический .п.р.иемопере1п.атчик / я.вляется таким образом обЩйм для .метеорологической ра1Г1ТТ ТТ. Tt Г TTT i-4TrYrrvT./ЧППО TTiTTTX.TJTТГТТ .- Т т /LM. Антенна 2 и блок 5 также являются общими для этих систем. Однако антенна может быть модифицировала или заменена другой антенной для того, чтобы создать или два сигнала угловОГО изм рёнйя; На эта-пе посадки излучаемые сигналы поступают ,на полуактивные радиом аяки-оТветчиии Р, установленные на взлетро-посадочной полосе. Принятые сигналы затем об|рабатываются приемником 6 и блоком 7 обработки. При этом в известной системе вид излучаемых сигналов; задан, Хгарактеристйки метеорологической РЛС определены заранее. Длительность кмпульсов является большой (5-6 мк/с), что при использовании обычного приемника, настроенного на импульсы такой длительности, приводит к средней ошибке но дальности порядка 80 м и не позволит измерять дальность меньше 800л. Антенна сканирует в пространств.ес м-алой скоростью (бО град/с) в большом угловом диапазоне (±90), что приводит к ниЗКой частоте обновлени1Я информация (один ход антенны примерно за четьгресе-. «унды). Наконец, частота поБтюрения импульсов является низкой (300 гц), что частично {компенсируется медленноттЬК) Сканирования за время прохождения луча антениы по мишени, последняя прданйма-ё г примерно десять импульсов. Эти характеристики недостаточны для выполнения .надлежаш,им образом посаДки по приборам, при которой необходимо иметь вь1сокую точность по дальности ДО очень малой дальности при высокой частоте обновления информации. , - Хотя длительность и частота повторенияимпульсов, а также скорость скайй|)Ьвания антенны остаются так1ими же, ВМетеорологической РЛС, тем .не менее согласно изабретению можно будет получатьннфор.Мацию, достаточную для создания вО можности посадки по прибор|а м. Точность по Дальности достигаетсЯ з:а счет осуществления измерений не по полньгм импульсам, а по их передним фронтам . В СВЯЗИ с этим приемник5 содержит приемные |цеп.и с полосой пропускания в 10- 20 раз более широкой, чем полоса пропуС каяИя метеорологического приемника. Для создания возможности четкого вйдёйёнйя фронтов импульсов. Дальность измеряется путем определения .времейнопо интервала между передним фронтом излучаемо им.пульса и передним ф|ронтом принимаемого -импульса. .При этом ошибка по дальности -может составлять .менее 10 ж. . . . - . -- Измерение малых дальностей становитсЯ возможным прежде всего благодаря тому, что рабочая частотав режиме«риема чж-стемы /LM отличается от чаСтотьГ излучёния. Таким образом, создается возмо яс но.сть работы приемника до окошайИя изучения И1мпульсов и измерения очень маых дальностей. . . . Наконец, точность по углу достигается за счет применения метода сравнения амплитуд либо на уровне антенны, если поледняя является а, моноимпульсного типа, либо на уровне радиомаяка. Эта точность повыш-аетсяздесь за счет Согласования полосы пропубкайия одной или нескольких цепей каналов изм-дрения угла с длительнбстью принимаемых импульсоз7 Это тем более возможно, что радиомаяк представляют собой точечн.ые мишени, осво1бождаемые, от окруЖ|ающих отраженных сигналив За счетсдвйга частоты Af. Как указывалось, метеорологический приемопередатчик / связан с антенной 2 через блок 3, который при приеме направляет сигналы раяиомая ков-счётчи1ков 9 в приемник 6. В последний с блока 3- поступают принимаемый сигнал, идущий из. циркулятора 31, и синхронизирующий .сигнал, выдаваемый блоком 32 связи в .eHT излучения. Синхронизирующий сигнал обрабат ывается в цепи синхронизации 10. Эта цепь содержит преобразователь, идентичн1 1й „преобразователям радиомаяков, гетеродин, необходимый для преобразования частоты принятых сигналов, контур автоматической подстройки частоты для подстройки частоты -гетеродина и детектор, вы-дающий видеочастотный синхронизирующий сигналв блок 7 обработки, который использует его для осуществлений измерений дальности. Сигналы приема, снимаемые с циркулятора 31, подаются в широкополосную прие1Иную цепь //. Эта цепь яв ляется ш.ирокоЛолосной, поскольку она прИБИмает сигналы различ-ных частот, ретранслируемые .радиойая,йами-ответчика;М 9. Она, содержит фильтрующие средства для выделения сИ1ПНалбв бт каждого радиомаяка. Это выделен21е может рсушествляться на сверхвысокй5:г ЧЙстотах или н-а промежуточной частоте. Затем сигналыраздельно детектиругОГс1Т Й ШЕ /|У выдает два сигнала 5i и 52 (или четыре сигнала, если раДиовдаяки ретр:ансй.ирунэт сигналы ни четырех различных ). Эти сигналыподаются на компаратор /2, который вырабатывает сигнал А, 3|ависящий от разности амплитуд сигналов Si и 52. Компаратор /if йредставляет собой, например, дифференциальный усилите ть. В некоторых случаях мйжётиспоДьз0.ватБСЯ су мматор 13, которЫйприним. сигнала 5i и 52 и выдает ейгнаЛ,слуШ1Ц,йй для определения момей а-прйёма:СйМа Швр-адШмаяков; И рен е д Льностей осуществляется по переднййиЛй5аДний фронтам излучаемых или я:р й} й йаемых Й МйульсОв: При этом суммаt6p /5 долясей ййёть дост аточно широкую полосу пропускания для сохранения этих лередних илг задаШ фронтов. 3,атем сигнау1ы 2 и Д .подаются ,на блак 7 обработки. Поскольку наземные радиомаяки находятся «а различных расстоянияхот самолета, соответств)ЮЩие им 1си гналы принимаются не. однов.ремен.но.
Таким образом, 1блок 7 обработки опознает и выделяет информацию о дальности и Об угл-е для каждого радиомаяка,
На фиг. 3 приведен вариант выполнения приемной ц-епй 11, в которой разделение сигнал Ов от радиомаяков . осуществляется иа сверхв йсошх частотах. Эта цепь содержит р|азделительный фильтр J4, в который поступают сигналы, принимаел ые антенной 2 и натгравляемые блокоМ 3, и который выдает два рязличных сигнала, один-на .частоте fo+A/ь а другой на частоте fo+AFa, где FQ - частдт.а излучения 1метеорологической РЛС; Л/i .и -сдвиги частот, создаваемые каждым радиомаяком-ответчикО;М 9. J
ВыходньГе .сигналы разделительного фильтра /4 подаются иа два смесителя 15 .и 16, в котсирые поступает также сигнал гетеродина, находящегося в цепи синхронизации/, и которые выдают соответствующие сягн1алы промежуточной;частоты. Затем эти от1тН| л 1 усиливаются двумя предварительными уеи-Дй.телями 17 и 18. При.нятые сигналы остаются разделен1ньг.м« до выхода цепи. Они проходят последователыно через логарифмические усил.ители ./Р и 20 и детекторы 21 и 22, а затем подаются На компаратор 12 и на сумматор 13 (фит. 2). ......
На фиг. 4 показгна приемная цепь, в которой разделение сигналов осуществляется на промежуточной частот.е.
В этой цепи полосовой фильтр 23 подавляет частоту передачи метеО|ИнфОрма1Ции .(т. е. сигналы этой частоты) и п-ройуйкает только сигналы радиомаяков с -частотами Fo+AFi и /o + Afs. Эра цепь подавляет таким образом сигналы, отражаемые от земл-и, а в смеситель 24 поступает также сиг-. нал гетеродина, находящегося в цепи синхронизации 10. Кроме того, приемная цепь содержит широкополосный предварительный усилитель 25 и разделительный фильур 26, KOTOipbra осуществляет разделение сигналов каждого радиомаяка по промежуточной частоте. Последовательность приема такая, же, как и в случае, представленном на фиг. 3. В случае, показанном на фиг. 4, сигналы остаются разделенными и проходят последовательно через оди1наковые ло-гарифмические усилители 27 и 5S и детекто-; ры 29 и 30. Затей они сравниваются в к napiaTOpe 12 и суммируютсяв™сумматорё ИЗ, после чего подаются в блок 7 обработки.
В примерах, представленных на фЩ. .3 я 4, цепи должны иметь достаточно широкие полосы пропускания для передали йередних .или задних фронтов, необх(};а;Й й с для измерения далвдости. Однако при у1гЛ.овых измерениях в последующей обработке
695586
8
участвует только амплитуда сигналов и достаточно иметь менее широкую полосу пропускания. Именно лоэ.тому в этих вариантах можно предусмотреть, например, .перед
.разделительным фильтром отвод для подачи принятых сигналов в широкополосные цепи, предназ1наченны€ для измерения даль- . ности. При этом остальные схемы прием.ной цепи 11 обязательно должны иметь широ0 кие полосы пропускания. ., 1.
Формула изобретения ,
1. Систе.ма приборной аэронавигации, содержащая на борту летательного аппара-.
-та импульсный метеорологический приемопередатчик, соединенный через блок высокочастотного разделения с антенной, блок мехатаического управления антенной, .соединенный. с индикатором метеообстановки, Ьход .которого соединен с выходом -импульсного метеорологического прямопередатчика, блок обработки, выход которого подключен к блоку индикации, а один из входов - к
5 яблоку механического управления а.нтенной, :и по крайней мере один наземный радиомаяк-Ответчик, отличающаяся тем, , с целью упрощения системы путем использования си-гналов метеорологического/
0 радиолокатора на этапе полета я посадки по приборам, -междублokoм высокочастотного разделения и блоком обработки включен приемник системы посадки по приборам ILM, работающ.ий Hia частоте, отличной от
5 Ч.асто гы импульсного метеорологического прие-мопередатчика, при этом приемник системы посадки по приборам ILM содержит последовательно соединенные цепь синхронизации и широкополосную пр-иемную
0 -цепь, каждый из выходов которой подключен к соответствующим входам компаратора и .сумматора, при этом вход цепи .синхронизащии приемника, соединен через. бл.ок высокочастотного разделения с входом син5 хронизации им-пульсного метеорологическо)ГО приемопередатчика, вход широкополосной приемной -цепи соединен с другим вы-ходом 1блока высокочастотного разделения, выходы компаратора, сумматора .и цепи
0 синхронизации являются выхода-ми приемника системы посадки по приборам ILM и подключены -к входам блока об|работки, а входы цепи оинхронизации и ш.ирокополосной приемной цепи являются его входами.
55 2. Система по п. 1, отличающаяся
тем, что щи)окополоаная приемная цепь содержит ра.здеЛигельный -фйлЬтр, «аждьгй
из выходов которого через пбследовательно
соединенные смеситель, предварительный
60 уси., логарифми.ческий .усилитель и.
Детектор подключены соответственно .к .eyi v 6pa и ко1мпаратора приемника
:истемы посадки по приборам ILM, вторые входы смесителей объединены и соединены
65 С соответствующим выходом цепи синхронизации приемлика системы подсадки по приборам LM. 3. Система по п. 1, о тлл чающаяся тем, что широкополосная приемная цепь содержит .последовательно соединенные полосовой фильтр, смеситель, широкополосный предварительный усилитель я разделительный фильтр, каждый из д&ух выходов которого через последовательно соединенные логарифмический усилитель и детектор
695586
10 подключены соответственно к входам сумматора я компаратора приемника системы посадки ПО приборам ILM. Приоритет по пунктам: 14.12.73- поп. 1; 28.03.74- по пп. 2 и 3. Источник информации, принятый во вниманиепри экспертизе: 1. Патент Франции № 2199594, кл. G 01 S 1/00,бпублик. 17.05.74 (прототип).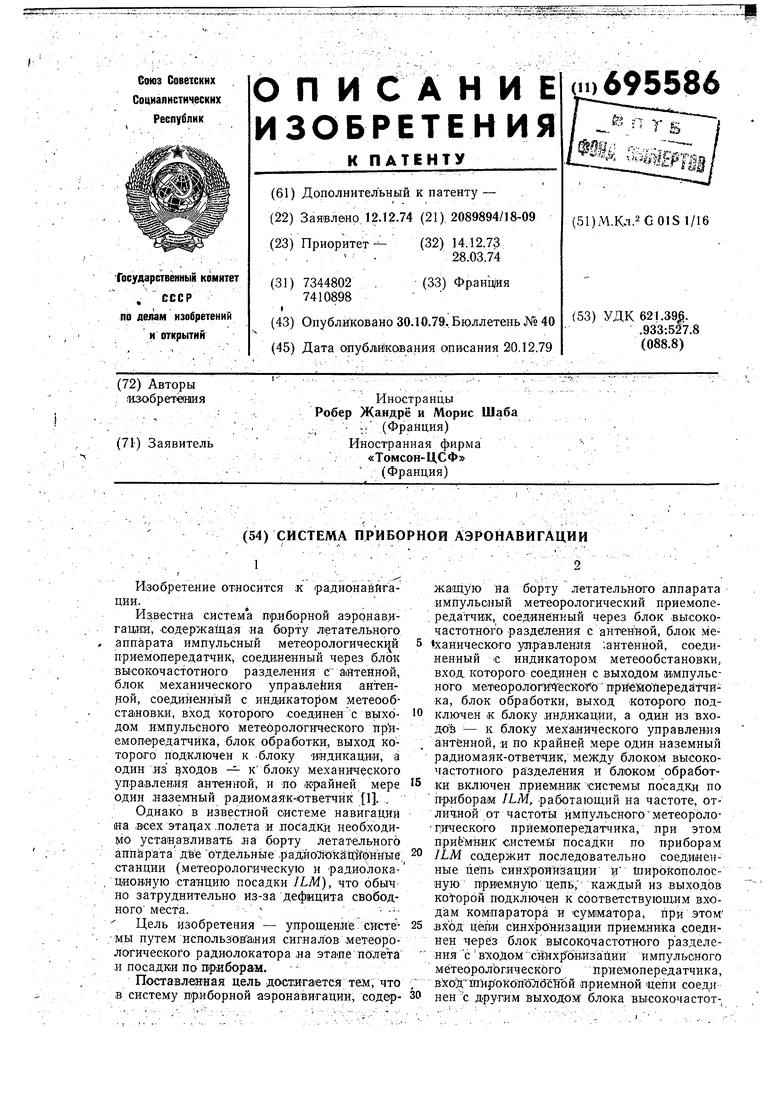


| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ СИГНАЛА НА ВХОДЕ АВТОДИННОГО АСИНХРОННОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2023 |
|
RU2808230C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| Активная распределённая антенная система для случайного множественного радиодоступа диапазона ДКМВ | 2017 |
|
RU2649664C1 |

