(54) ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное устройство | 1979 |
|
SU816951A1 |
| Ограничитель грузоподъемности стреловых кранов | 1956 |
|
SU106831A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| Шаговый подъемник | 1978 |
|
SU767013A1 |
| Полиспастное устройство | 1973 |
|
SU460236A1 |
| Устройство для монтажа вертикальных конструкций | 1980 |
|
SU906932A1 |
| Стреловой самоходный кран | 1986 |
|
SU1321666A1 |
| ПОЛИСПАСТ | 2001 |
|
RU2192386C1 |
| Устройство для обслуживания вертикальных высотных сооружений | 1984 |
|
SU1218032A1 |
| Грузоподъемное устройство | 1977 |
|
SU749795A1 |
I
Изобретение относится к области подемно-транспортного машиностроения и может быть использовано непосредственно в конструкциях грузоподъемных устройств, преимущественно для стволов высотных дымовых труб..
Известно грузоподъемное устройство, содержащее полиспастъ, несущую груз траверсу и поворотную траверсу 1J .
Недостатком данного устройства является то, что в нем предусмотрено выравнивание только двух полиспастов, слоность кинематической системы, обусловленную наличием рычажного устройства и дифференциального механизма.
Наиболее близким техническим решением является грузоподъемное устройство, преимущественно для монтажа газо-
отводящих стволов высотных -ДЫМОВЫХ
труб, содержащее опорную раму, на которой закреплены палиспасты, одни конц ветвей которых соединены с приводными лебедками, а другие свободные взаимос-вяяаны между собой и конечные выключатели автоматической системы управления, взаимодействующ11е со свободными концами ветвей палиспастов- 2,
Недостстком данного устройства яв . ляется недостаточная грузоподъемность, обусловленная возможностью использования только двух полиспастов, так как в нем не предусмотрена возможность выравнивания груза при использовании большего числа палиспастов, а увеличение ветвей полиспастов вызывает значительнь е трудности, из-за сложности запасовкн тросов большой длины.
Целью настоящего изобретения является увеличение грузоподъемности устройства и исключения переноса груза.
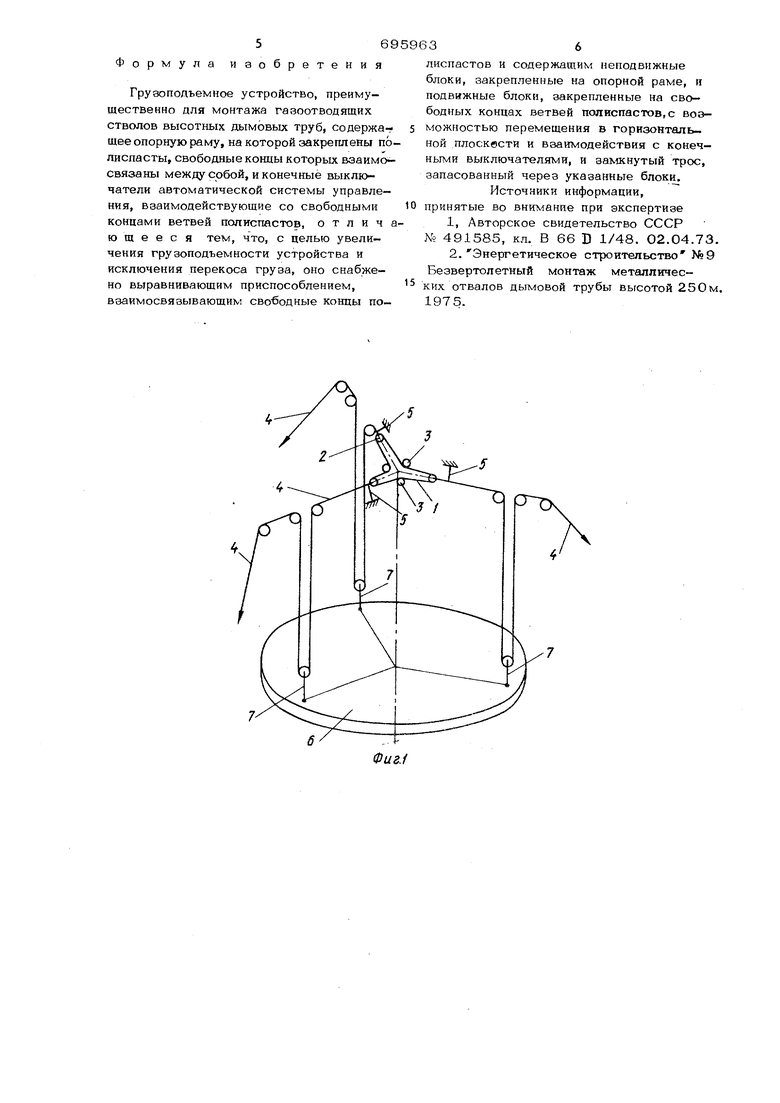
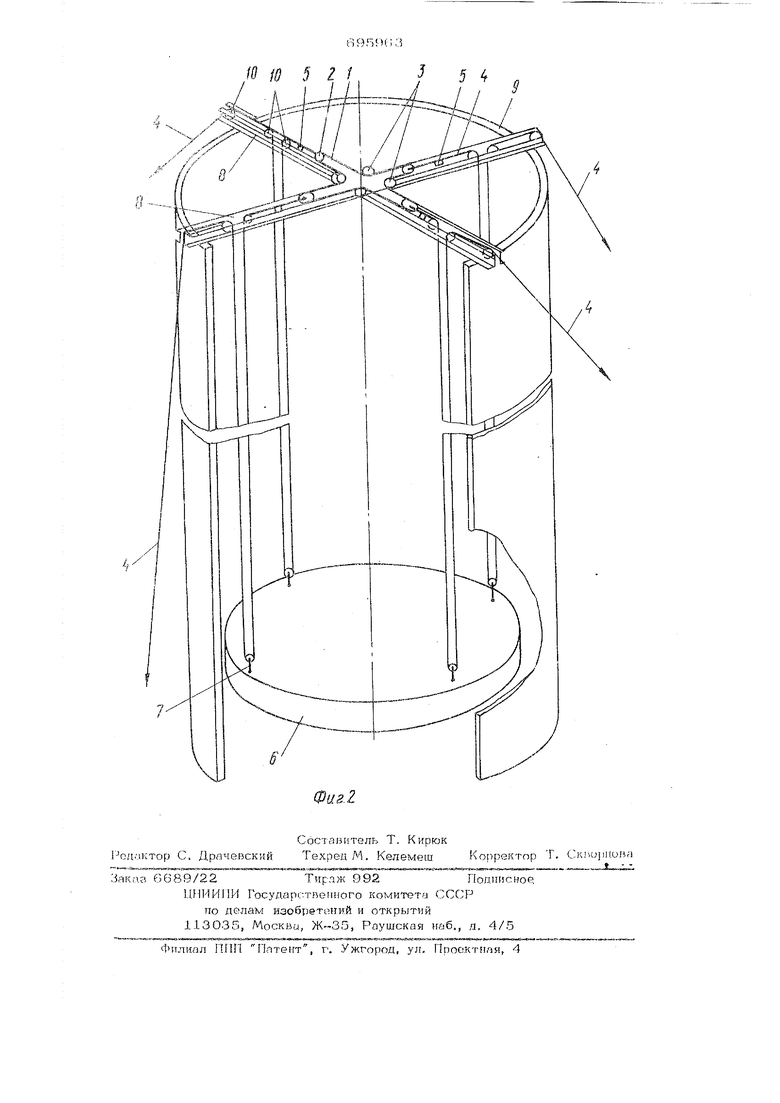
Поставленная цель достигается тем, что устройство снабжено выравнивающим приспособлением, взаимосвязывающим свободные концы полиспастов и содержащим неподвижные блоки, закрепленные на опорной раме, и подвижные блоки, закрепленные на свободных концах ветвей палнспастов с возможностью перемещения в горизонтальной плоскости и взаимодействия с конечными выключателями, и замкнутый трос, запасованньй через указанные блоки. На фиг. 1 показана схема устройства с использованием трех пааис- пестов; на фиг. 2 - устройство а аксонометрии с использованием четырех ia лиспастов. Грузоподъемное устройство содержит выравнивающее приспособление, состоя- щее ив замкнутого троса 1,. аапасован- кого через подвижные блоки 2 и неподвижные блоки 3. Блоки 2 закреплены на свободных концах тросов 4 и взаимодействуют с выключателями 5... Поднимаемый груз б крепится стропам 1. Другие концытросов 4 грузовых полиспастов наматываются на лебедки (на чертеже не показаны). Неподвижные блоки 3 зацеплены на раме 8 верхнего среза 9 несущей оболочки дымовой трубы. Рама 8также сна жема направляющими блоками 10, Предложенное грузоподъемное устройство работает следующим образов. Подъем груза 6, который крепится к ГрузопоДьемномз устройству стропами 7, производится наматыванием одних концов тросов 4 грузовых полиспастов на барабаны независимых между собой лебедок, установленных у основания дымовой трубы (на чертеже ие показаны). При этом число лебедок равно числу г)у зовых полиспастов. Каждый трос 4 груз вых полиспастов аапасовывается через .направляющие блоки 10, установленные иа раме 8 верхнего среза 9 дымовой трубы, что позволяет равномерно распределить нагрузку на раме 8 и, соответстBetnio, на верхний срез 9 несущей оболоч ки дымовой трубы. Свободные концы тро сов 4 грузовых полиспастов соединены между собой посредством выравнивающс г приспособления. Если подъем груза 6 производится. например, четырьмя независимыми лебеда ками, то при синхронной работе лебедок на каждый из четырех тросов 4 грузовых полиппастов приходится едина ковая нагрузка и все подвижные блоки 2 выравнивающего приспособления находятся на одинаковом расстоянии от цент рамы верхнего среза 9 дымовой трубы. ЕСЛИ же одна из независимых лебе-док будет наматывать трос 4 на свой барабан быстрее чем остальные, то возникает перекос поднимаемого груза,- 6, который своей массой будет препятствовать этому, вследствие чего в тросе 4 Возникнут дополнитех1ьные усилия, которые передадутся подвижному блоку 2, к которому крепится свободный конец данного троса 4. Под действием дополнительной нагрузки на один из тросов 4 и, соответственно, на один из подвижных блоков 2, все подвижные блоки 2 изменят свое {тервоначальное положение, так как все они запасованы одним замкнутым тросом 1, Изменение взаимного расположения подвижных блоков 2 выразится в следующем: подвижный блок 2, к которому закреплен свободный конец троса 4, наматываемый на барабан лебедки быстрее чем остальные, под действием дополнительных усилий переместится в направляющих от центра рамы 8 в сторону своего конечного вь;ключателя S. Остальные подвижные блоки 2, вследствие единой запасовки замкнутым тросом 1, переместятся под действием той же дополнительней нагрузки по направлению к центру рамы 8. Перемещаясь к центру рамы 8 эти подвижные блоки 2 подтянут свободные концы тросов 4 грузовых полиспастов отстающих в данный момент лебедок, в результате чего груз 6 займет горизонтальное положение. Если в результате работы начнет более быстро наматывать на свой барабан трос 4 лебедка, которая ранее отставала, то опять все подвижные блоки 2 изменят свое положение аналогично уже описанному. В случае непредвиденного рывка, который обусловлен резким уменьщением длины сбегающего конца троса 4, подвижный блок 2, к которому присоединен сбегающий конец данного троса 4, подойдет к своему конечному выключателю 5, что приведет к замедлению, а в п оследствии и к остановке работы лебедки до момента подтягивания остальных тросов 4 лебедками. Конечные выключатели 5 расположены на раме 8 в соответствии со своими подвижными блоками 2 и отина замкнутого троса 1 взята такой, что разность расстояний от центра рамы до подвижных блоков 2 и Неподвижных блоков 3 равна рабочему ходу свободных концов тросов 4 полиспастов, что обеспечивает плавную и точную работу выравнивающего приспособления. Формула изобретения Грузоподъемное устройство, преимушественно для монтажа газоотводящих стволов высотных дымовых труб, содержашее опорную раму, на которой закреплены по лиспасты, свободные концы которых вэаимо связаны между собой, и конечные выключатели автоматической системы управления, взаимодействующие со свободными концами ветвей полиспастов, отлич ющееся тем, что, с целью увеличения грузоподъемности устройства и исключения перекоса груза, оно снабжено выравнивающим приспособлением, взаимосвязывающим свободные концы по- 6 36 лиспастов и содержащим неподвижные блоки, закрепленные на опорной раме, и подвижные блоки, закрепленные на свободных концах ветвей полиспастов,с возможностью перемещения в горизонтальной плоскести и взаимодействия с конечными выключателями, и замкнутый трос, запасованный через указанные блоки, Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 491585, кл. В 66 D 1/48. 02.04.73. 2. Энергетическое строительство №9 Безвертолетный монтаж металлических отвалов дымовой трубы высотой 250м. 1975.
