Изобретение относится к системам управления угловым движением динамических объектов, а именно к системам стабилизации углового положения объектов с присоединенными упругими элементами конструкции.
Цель изобретения - повышение точности управления и сокращение времени переходного процесса стабилизации углового положения объекта с упругим элементом конструкции.
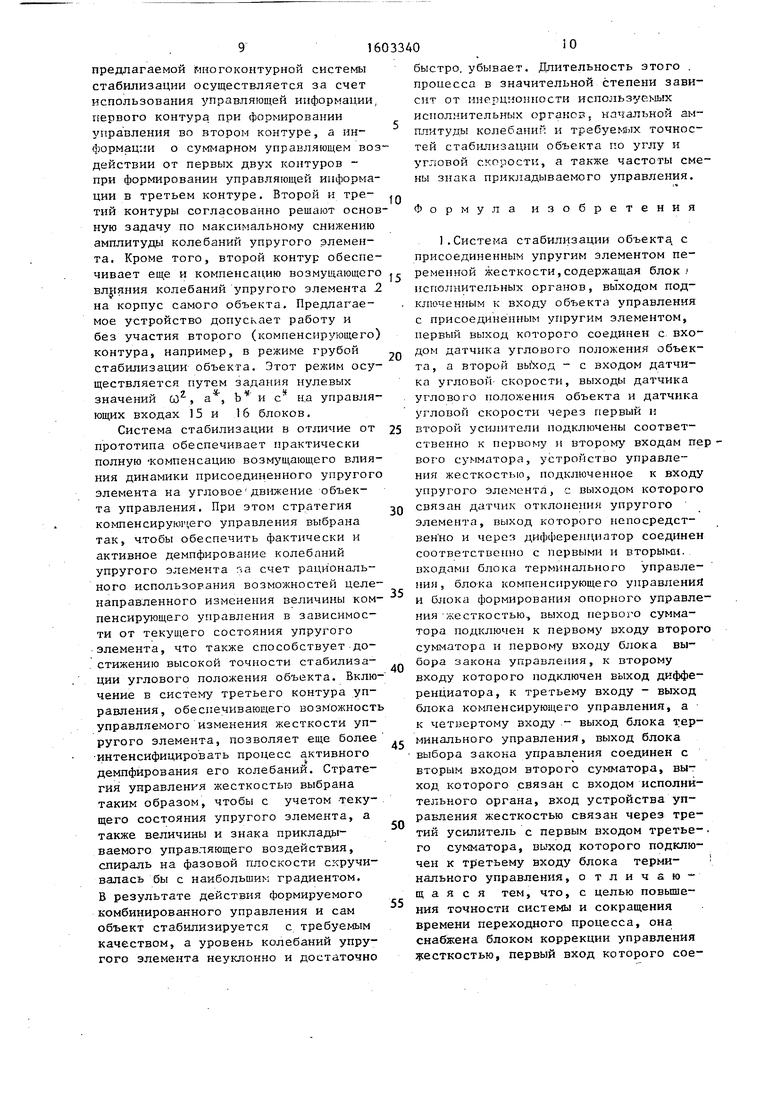
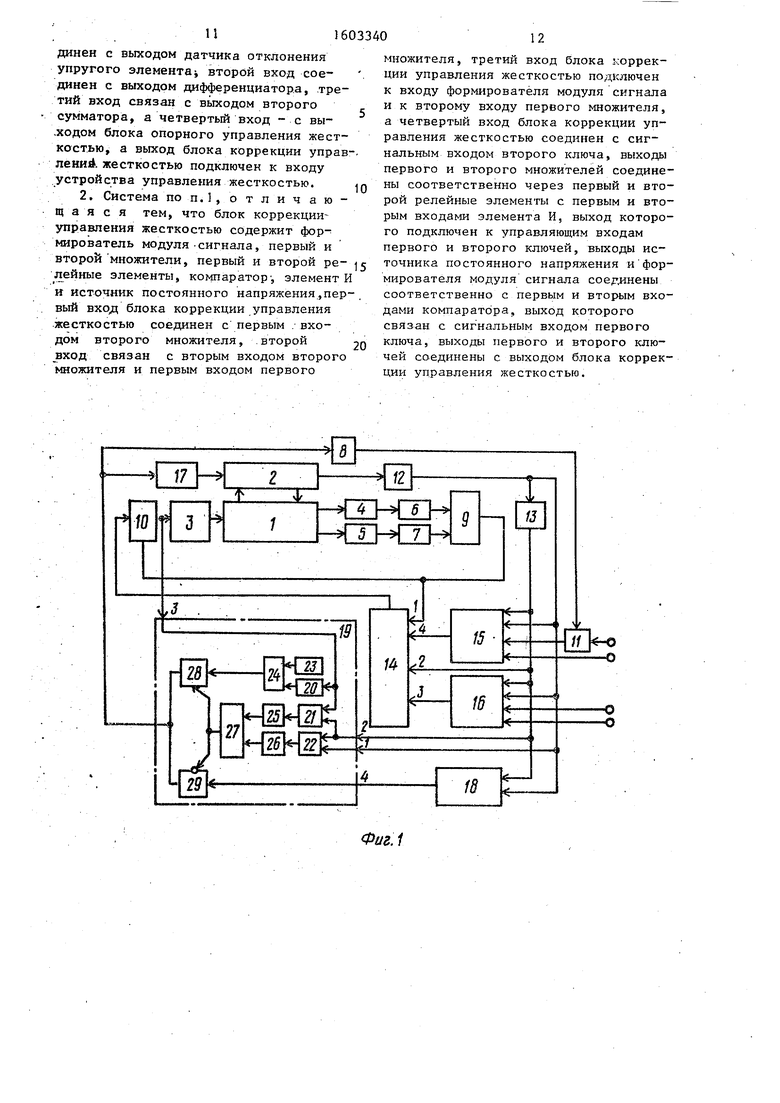
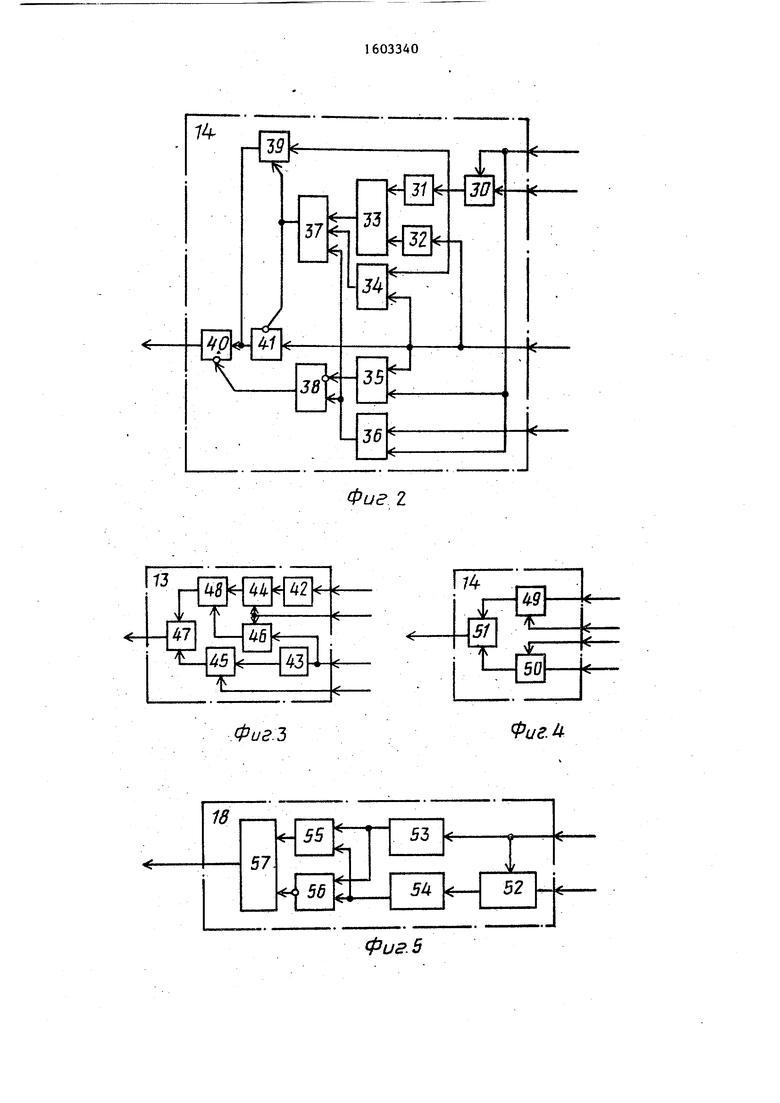
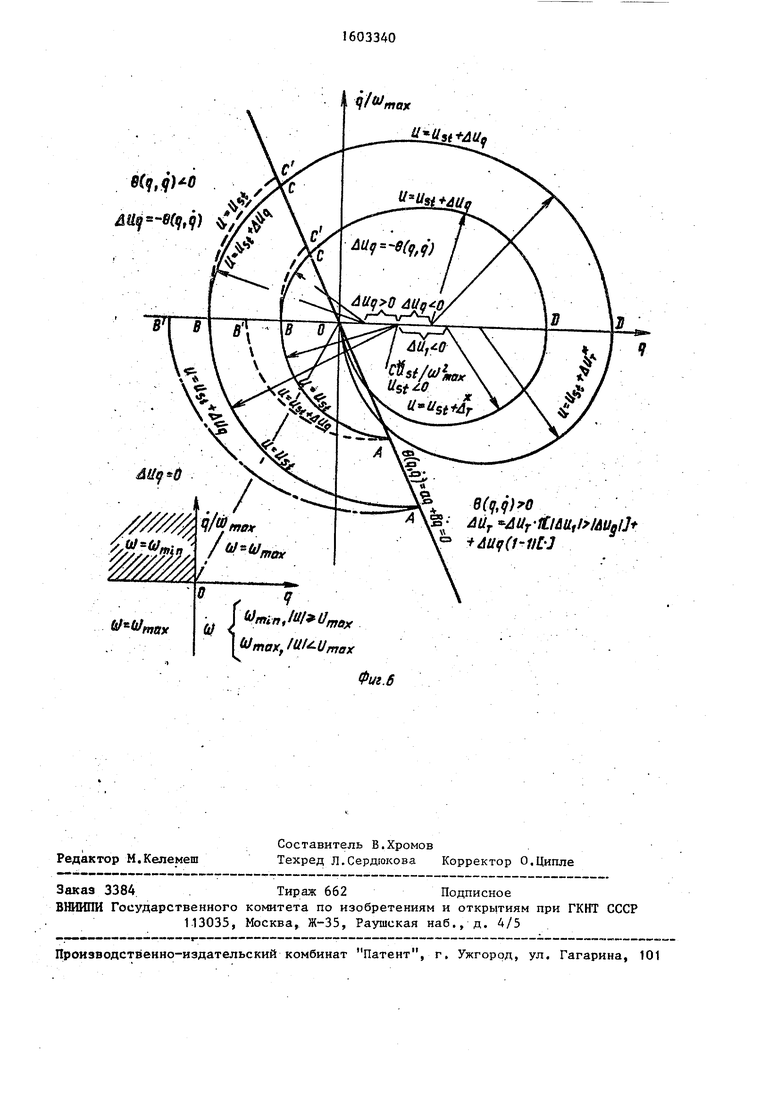
На фиг.1 представлена функциональная схема предлагаемой системы стабилизации объекта с присоединенным упругим элементом; на фиг.2 - структурная схема логики выбора управления; на фиг.З - то же, блока терминального управления; на фиг.4 - то же, блока компенсирующего управления; на фиг. 5 - то. же, блока, формирования опорного управления жесткостью; на фиг.6 - фазовая траектория движения упругого элемента.
Система стабилизации объекта с присоединенным упругим элементом содержит (фиг.1): объект 1 управления с присоединенным упругим элементом 2; блок 3 исполнительных органов, датчики 4 и 5 угла и угловой скорости, первый 6, второй 7 и третий 8 усилители, первый 9, второй 10 и третий 11 сумматоры; датчик 12 отклонений упругого элемента; дифференциатор 13; блок 14 выбора закона управ05
о со 00
4
31603340
ления; блок 15 терминального управления; блок 16 компенсирующего управления; устройство 17 управления жест- - костью; блок 18 формирования опорного управления жесткостью; блок 19 коррекции управления жесткостью; состоящий, иэ формирователя 20 модуля сигнала, первого 21 и второго 22 множителей, источника 23 постоянного на- ю пряжения, компаратора 24, первого 25 и второго 26 релейных элементов, элемента И 27, первого 28 и второго 29 ключей.
Блок 14 выбора закона управления 1.5 содержит (фиг.2) сумматор 30, формирователи 31 и 32 модуля сигнала, компаратор, 33, .три схемы 34-36 сравнеия знаков сигналов, элементы И 37 38, ключи 39-41.
Блок 15 терминального управления содержит (фиг.З) два квадратора 42 43, два делителя 44 и 45, два мноителя 46 и 47, сумматор 48.
Блок 16 компенсирующего удравле- 25 ия содержит (фиг.4) два множителя 49 50 и сумматор 51.
Блок 18 формиров ания опорного упавления жесткостью содержит (фиг.5) сумматор 52, два релейных лемента 53 и 54, элемент И 55, элеент ИЛИ-НЕ 56, элемент ИЛИ 57.
В основу изобретения положено слеующее . .. . Динамика процесса угловой одно- анальной стабилизации объекта с учеом основной низкочастотной формы коебаний присоединенного к нему упруого элемента описывается следующей системой дифференциальных уравнений Cf 9Cq,q) -I- U UU
30
s-t (J) q -dq -W - -(U5t+u4) ,
40
m
I..
де У) , (f - текущее рассогласование
по углу и угловой скорости объекта управления; текущие отклонения,скорость и ускорение относительного движения присо- единенного .к объекту упругого элемента;
I - момент инерции объекта по оси управления;
а - коэффициент динамического взаимовлияния объекта и ; упругого элемента;
m - массовый параметр упругого элемента;
45
50
55
20
фо ле
35
ет но по ды то на же мо бо ку ср фо ни ва ис та му ти чи ба до ущ це ко мо эл зн ни по зи
Ь, с - диссипативный и жесткости иый параметры упругого
элемента;
у,
()aq+bq- возмущающее ускорение, о бусловленное динамикой упругого элемен- Taj
gt K,qi+ К2Ср(К.,0, ) - традиционное пропорционально- дифференциальное стабилизирующее управление; AU« - компенсирующая управляющая добавка (компенсирую- щая возмущающее влияние упругого элемента);
-aV(Im-a) ; .
1.5
20
W
(Im- а)
а -S
Im-a
ba Im - a
Самым простым очевидным решением формирования компенсирующего управления Аи л является следующее:
uUo -Э (q .q).
0
0
5
0
5
5
Однако данное решение не учитывает тот факт, что при слабом собственном демпфировании упругого элемента потребуется достаточно долго прикладывать компенсирующее управление, которое по величине при малых Координатных рассогласованиях объекта может оказаться несоизмеримо больше самого стабилизирующего управления и, более того, противоположио ему по знаку. А следовательно, любые (даже сравнительно малые) погрешности в формировании компенсирующего управления могут привести к нарушению качества стабилизации. Чтобы этого не происходило или возможности проявления таких эффектов были сведены к минимуму, необходимо одновременно с эффек-. тивной компенсацией возмущения обеспечивать и активное демпфирование колебаний упругого элемента. Этого можно достичь за счет рационального (без %: ущерба основному к.онтуру управления) целенаправленного изменения величины компенсирующего управления в зависимости от текущего состояния упругого элемента, чем определяется величина и знак создаваемого возмущающего ускорения, а также от знака, формируемого по состоянию самого объекта стабили- зирзтощего управления.
516033406
Закон формирования величины Ди„ того элемента записывается в виде: для случая постоянной жесткости упру
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации объекта с присоединенным упругим элементом | 1988 |
|
SU1525676A1 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1988 |
|
SU1587465A1 |
| Адаптивное устройство для гашения колебаний упругого элемента переменной жесткости | 1989 |
|
SU1596306A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| Устройство для управления объектом с присоединенными упругодеформируемыми элементами | 1989 |
|
SU1767476A1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
Изобретение относится к системам управления угловым движением динамических объектов, а именно к системам стабилизации углового положения объектов с присоединенными упругими элементами конструкции. Целью изобретения является повышение точности управления и сокращение времени переходного процесса стабилизации углового положения объекта с упругим элементом конструкции. Система стабилизации содержит блок исполнительных органов, датчики угла и угловой скорости, первый, второй и третий усилители, первый, второй и третий сумматоры, датчик отклонений упругого элемента, дифференциатор, блок выбора закона управления, блок терминального управления, блок компенсирующего управления, устройство управления жесткостью, блок формирования опорного управления жесткостью и блок коррекции управления жесткостью. 6 фиг.
UU.
О, SignUg Sign9 А SignUgt Sign q iU, /uUj 6JA5ignliU,.-Sign9ASignU5t Signq ,
- 9(q, q), иначе
где би
. i(c5 Я);
U5V к,If + K,cf;
(3)
a m
В случае переменной жесткости упругого элемента целесообразно изменять ее таким образом, чтобы, не ухудшая характеристики движения объекта при управлении по закону (2),.внести дополнительный вклад в демпфирование колебаний упругого элемента.
ПустьсОе сОд,ин, СО „а к1 диапазон изменения частоты колебаний присоединенного упругого элемента.
Пренебрегая собственным затуханием упругого элемента, из формулы (1) уравнение его относительного движения имеет вид
q + .
(А)
где и Ugt + Ли .
На фиг,6 изображена траектория движения упругого элемента при уравнении по закону (2) при Q -С0ма :с const и и 0.
Пусть на интервале управления itU const. Обозначим V const, тогда из выражения (4) уравнение фазовой траектории упругого элемента, начинающейся в точке (q Яр/ СО ),имеет вид
(q - 7л-г-) - () (% - -Jl)
.а
-IM .
(5)
В дальнейшем все траектории рассматриваем на фазовой плоскости (q,q/OJ|). из формулы (5) при СО COj Kiv:c
/оД-) + () () +
COL« Vvav/ uWc
ь (
ЫАЮКС а при СО Q мт получаем
(q - ()/эе
ШАДИНWmaife
(2)
5
о 5
0
5
5
0
5
(Чо - -Л---) ()V . WMHHСОдляКс
(7)
Си маке Уравнение 6 определяет окружность
V
с центром в точке (г:т-, 0) и радиу- I-..
СОМ R н -сот;/ - оЧ../ р нение (7) описывает эллипс с центром в точке ( , 0), большой полуосью D (q,- V/CO,/-f (qo%v,«)H
малой полуосью- D. Из формул (6) и (7) найдем точки пересечения этих двух траекторий : ( iq /WMaKc) и
(-% ;
-л|4 - 4Vq;
причем абсцисОЗмасс
сы этих точек симметричны относительно начала координат.
Это обстоятельство позволяет сделать следующие выводы: в секторе АОВ целесообразно принимать СО ОЭл1щсс поскольку круговая траектория, исходящая из любой точки этого сектора, лежит к началу координат ближе, чем эллиптическая; в секторе БОС выгоднее принять Q, СОуич ; в секторе СОД необходимо брать с йма1ссВ секторе АОД по закону (2) осуществляется терминальное управление. Если мощности исполнительных органов недостаточно для приведения упругого элемента в начало координат при максимальной жесткости, тогда необходимо переходить к минимальной жесткости, что следует из анализа выражения (3) для расчета , т.е. чем меньше СО , тем меньшее по абсолютной величине терминальное управление требуется для перевода объекта из одного и того же положения в одну и ту же требуемую конечную точку. Поэтому уменьшая Q , можно обеспечить перевод в терминальную точку даже тогда, когда при большем сО реализация такого управления невозможна из- за того, что|и,|со.,;
Следовательно, логика управления жесткостью в этом -секторе следующая
WMOKC (и I f , если /и и.
СО
MOIl C )
.где и - абсолютная величина макси- Juakc
мального ускорения, развиваемого исполнительш.ми органа- . ми объекта.ig
В нижней части фиг.6 показаны
и ,Sign(qU) 1 ASign(rw) -1 (8) U(;02. иначе,
где и.
СО,li; /и/ UMCIKO,
LO,U .с ,
1, Sign(qq) -1 2. 1 0,Sign(qq) 1 .
U«
игналы управления 1 и О соотг етствуют минимальной и максимальной жесткости упругого элемента.
Предлагаемый закон управления (2) (8) реализуется системой стабили- зации, функциональ.ная схема которой представлена на фиг.1, следующим образом.,
Сигнал, соответствующий .,формируется на выходе сумматора 9. На выходе блока 15 формируется U-j- в соответствии с выражением (3), причем исходные значения параметров си 03 поступают на установочные входы блока 15. С выхода блока 16 снимается сигнал 9 (q,q) + , причем параметры а и подаются на установочные входы этого блока. Сигнал и снимается с выхода сумматора 30, входящего в состав блока 14, на выходе которого формируется собственно значение AU;,. Логика закона (2) реализуется в блоке 14. Причем истинность логического выраже ния (01 определяет компаратор 33, логического выражения SignUg Sign 0 схема сравнения знаков (ССЗ)35, логического выражения -SignU : Signq - ССЗ 36, а логического выражения SigniU -Sign Э - ССЗ 34. Истинность первого и второго лог1 ческих выражений закона (2) определяется элементами И 37 и 38 соответственно, которые и организуют формирование требуемой управляющей информации на выходе блока 14 с помощью ключей 39-41. Сумматор 10 служит для формирования U
ласти фазовой плоскости и соответствующие им жесткости упругого элемент согласно приведенным выводам при V О. В силу симметрии при изменении знака нагружения упругого элемента достаточно провести инверсию (геометрическую) логик относительно начала координат.
Таким образом, закон управления жесткостью может быть представлен.
0
5
0
35
40
45
50
55
и + йи л . На выходе датчика 12 формируется текущее значение q, а на выходе блока 10 - q соответственно.
Сигнал, соответствующий U , формируется Не. выходе блока 19 в соответствии с выражением (8). Причем истинность логического выражения Sign|qU 1 определяется последовательно сое-,- диненными множителем 21 и релейным элементом 25, а выражения Sign|q.q | -1 - множителем 22 и релейным элементом 26. Истинность выражения |и| ид,д.(,определяется компаратором 24, на выходе которого формируется UQ. Сигнал, пропорциональный U , формируется .блоком 18. Устройство управления жесткостью 17 изменяет жесткость упругого элемента, причем при наличии на входесигнала О формируется максимальная жесткость, а сигнала - минимальная.
Предлагаемое устройство работает следующим образ ом.
При наличии упругих колебаний элемента 2, по амплитуде не превосходящих зону нечувствительности датчика отклонений 12 (а точнее, при их фактическом отсутствии), ненулевое управление Ug формируется лишь только на выходе сумматора 9 - основной (первый) контур стабилизации объекта. Работа устройства не отличается от рг,- боты прототипа. Если же уровень упругих колебаний элемента 2 превышает зону нечувствительности, то в работу включаются еще два контура управления: контур формирования компенсирующего управления, состоящий из блоков 14-16; контур активного демпфирования колебаний элемента 2, включающий блоки 18,19 и исполнительный орган 17. Взаимоувязка работы контуров
916033АО
предлагаемой многоконтурной системы стабилизации осуществляется за счет использования управляющей информации, ггервого контура при формировании управления во втором контуре, а информации о суммарном управляющем воздействии от первых двух контуров - при формировании управляющей информации в третьем контуре. Второй и тре- Q тий контуры согласованно решают основную задачу по максимальному снижению амплитуды колебаний упругого элемента. Кроме того, второй контур обеспе10
быстро, убывает. Длительность этого пропесса в значительной степени зав сит от мнерцио П1ости используемых исполнительных органов, начальной а п,питуды колебаний и требуеья 1Х точно тей стабилизации объекта по углу и угловой скорости, а также частоты с ны знака прикладываемого управления
1
Формула изобретени
чивает еще и компенсацию возмущающего jr ременной жесткости,содержащая блок .
влцяния колебаний упругого элемента 2 на корпус самого объекта. Предлагаемое устройство допускает работу и без участия второго (компенсирующего) контура, например, в режиме грубой стабилизации объекта. Этот режим осуществляется путем задания нулевых
20
30
35
40
значений Q, а, Ь и с н.а управляющих входах 15 и 16 блоков.
Система стабилизации в отличие от 25 прототипа обеспечивает практически полную -компенсацию возмз щающего влияния динамики присоединенного упругого элемента на угловое дв iжeниe объекта управления. При этом стратегия компенсируюггего управления выбрана так, чтобы обеспечить фактически и активное демпфирование колебаний упругого элемента за счет раци ональ- ного использования возможностей целенаправленного изменения величины компенсирующего управления в зависимости от текущего состояния упругого элемента, что также способствует до- , стижению высокой точности стабилизации углового положения объекта. Включение в систему третьего контура управления, обеспечивающего возможность управляемого изменения жесткости упругого элемента, позволяет еще более интенсифицировать процесс а ктивного демпфирования его колебаний. Стратегия управления жесткостью выбрана таким образом, чтобы с учетом -текущего состояния упругого элемента, а также величины и знака прикладываемого управляющего воздействия, спираль на фазовой плоскости скручивалась бы с наибольшим градиентом. В результате действия формируемого комбинированного управления и сам объект стабилизируется с требуемым качеством, а уровень колебаний упругого элемента неуклонно и достаточно
исполнительных органов, выходом под ключенным к входу объекта управлени с присоединенным упругим элементом, первый выход которого соединен с вх дом датч1П а углового положения объе та , а второй вы ход - с входом датчи ка угловой скорости, выходы датчика углового положения объекта и датчик угловой скорости через первый и второй усилители подключены соответ ственно к первоь л, и второму входам вого сумматора, устройство управления жесткостью, подключенное к вхо упругого элемента, с выходом которо связан датч1 к отклонения упругого элемента, выход которого непосредст венно и через дифференциатор соедин соответственно с первыми и вторЫ№1. входами блока терминального управл ния, блока компенсирующего управлен и блока формирования опорного управ ния -жесткостью, выход первого сумма тора подключен к первому входу втор сумматора и первому входу блока вы бора закона управле П1я, к второму входу которого подключен выход дифф ренциатора, к третьему входу - выхо блока компенсирующего управления, а к четвертому входу - выход блока те JC минального управления, выход блока выбора закона управления соединен с вторым входом второго сумматора, вы ход которого связан с входом исполн тельного органа, вход устройства уп равления жесткостью связан через тр тий усилитель с первым входом треть го сумматора, выход которого подкл чен к третьему входу блока терми- нального управления, отличаю щаяся тем, что, с целью повыше ния точности системы и сокращения времени переходного процесса, она снабжена блоком коррекции управлени жесткостью, первый вход которого со
50
55
О
10
быстро, убывает. Длительность этого . пропесса в значительной степени зависит от мнерцио П1ости используемых исполнительных органов, начальной ам- п,питуды колебаний и требуеья 1Х точностей стабилизации объекта по углу и угловой скорости, а также частоты смены знака прикладываемого управления.
1
Формула изобретения
0
0
5
0
5
исполнительных органов, выходом подключенным к входу объекта управления с присоединенным упругим элементом, первый выход которого соединен с входом датч1П а углового положения объекта , а второй вы ход - с входом датчика угловой скорости, выходы датчика углового положения объекта и датчика угловой скорости через первый и второй усилители подключены соответственно к первоь л, и второму входам пер - вого сумматора, устройство управления жесткостью, подключенное к входу упругого элемента, с выходом которого связан датч1 к отклонения упругого элемента, выход которого непосредственно и через дифференциатор соединен соответственно с первыми и вторЫ№1. входами блока терминального управления, блока компенсирующего управлений и блока формирования опорного управления -жесткостью, выход первого сумматора подключен к первому входу второго сумматора и первому входу блока выбора закона управле П1я, к второму входу которого подключен выход дифференциатора, к третьему входу - выход блока компенсирующего управления, а к четвертому входу - выход блока тер- C минального управления, выход блока выбора закона управления соединен с вторым входом второго сумматора, выход которого связан с входом исполнительного органа, вход устройства управления жесткостью связан через третий усилитель с первым входом третье- го сумматора, выход которого подключен к третьему входу блока терми- нального управления, отличающаяся тем, что, с целью повышения точности системы и сокращения времени переходного процесса, она снабжена блоком коррекции управления жесткостью, первый вход которого сое0
5
динен с выходом датчика отклонения упругого элемента4 второй вход соединен с выходом дифференциатора, третий вход связан с выходом второго сумматора, а четвертый вход - с вы- -ходом блока опорного управления жесткостью, а выход блока коррекции управ-. лениА жесткостью подключен к входу устройства управления жесткостью.
10
множителя, третий вход блока коррекции управления жесткостью подключен к входу формирователя модуля сигнала и к второму входу первого множителя, а четвертый вход блока коррекции управления жесткостью соединен с сигнальным входом второго ключа, выходы первого и второго множителей соединены соответственно через первый и второй релейные элементы с первым и вторым входами элемента И, выход которого подключен к управляющим входам первого и второго ключей, выходы исвторой множители, первый и второй ре- точника постоянного напряжения и форлейные элементы, компаратор , элемент И и источник постоянного напряжения,пер-. вый вход блока коррекции управления жесткостью соединен с первым . входом второго множителя, .второй 20 ход связан с вторым входом второго множителя и первым входом первого
мирователя модуля сигнала соединены соответственно с первым и входами компаратора, выход которого связан с сигнальным входом первого ключа, выходы первого и второго ключей соединены с выходом блока коррекции управления жесткостью.
множителя, третий вход блока коррекции управления жесткостью подключен к входу формирователя модуля сигнала и к второму входу первого множителя, а четвертый вход блока коррекции управления жесткостью соединен с сигнальным входом второго ключа, выходы первого и второго множителей соединены соответственно через первый и второй релейные элементы с первым и вторым входами элемента И, выход которого подключен к управляющим входам первого и второго ключей, выходы источника постоянного напряжения и формирователя модуля сигнала соединены соответственно с первым и входами компаратора, выход которого связан с сигнальным входом первого ключа, выходы первого и второго ключей соединены с выходом блока коррекции управления жесткостью.
Фиг. 1
Фиг г
Фиг. 5
6/eu/,
wffy
minJai U (ma)(,
таж
e((f,j)0
tij. UfltluUiMAUglJi- - (1-1lCJ
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1983 |
|
SU1129585A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система стабилизации объекта с присоединенным упругим элементом | 1988 |
|
SU1525676A1 |
