(54) ЛИНЕЙНЫЙ АППРОКСИ/МАТОР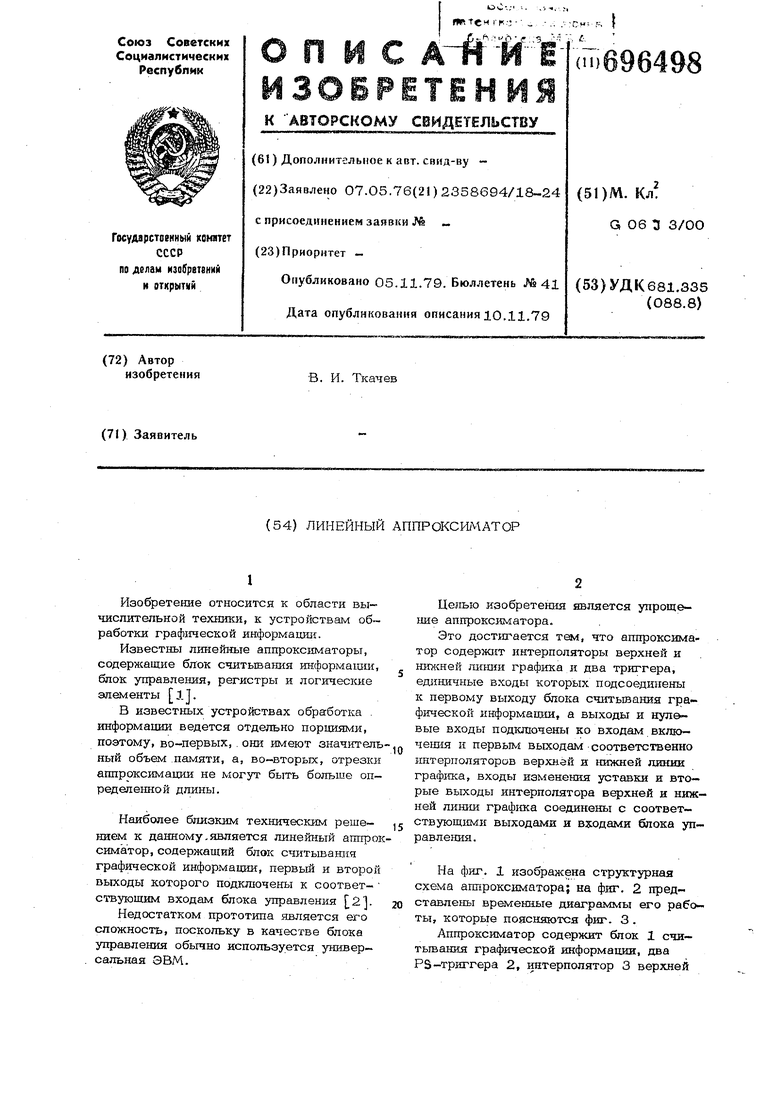

| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный аппроксиматор | 1983 |
|
SU1157548A1 |
| Устройство для считывания графической информации | 1978 |
|
SU746613A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Интерполятор для шагового графопостроителя | 1978 |
|
SU736137A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1675849A1 |
| Интерполятор | 1983 |
|
SU1108395A1 |
| Интерполятор | 1978 |
|
SU798729A1 |
| Интерполятор | 1985 |
|
SU1413600A1 |
| Интерполятор | 1983 |
|
SU1089551A1 |

I
Изобретение относится к области вычислительной техники, к устройствам об работки графической информашш.
Известны линейные аппроксиматоры, содержащие блок считьтагшя информашш, блок управления, регистры и логические элементы l.
В известных устройствах обработка . информашш ведется отдельно порциями, поэтому, во-первых, . они имеют значитель ный объем памяти, а, во-вторьк, отрезки аппроксимации не могут быть больше определеьшой длины.
Наиболее близким техническим решением к данному.является линейный ашгроксиматор, содержащий блок считывания графической информашш, первый и второй выходы которого подключены к соответ- ствующим входам блока управления 2.
Недостатком прототипа является его сложность, поскольку в качестве блока управления обычно используется универсальная ЭВМ.
Целью изобретения является упрощение аппроксиматора.
Это достш ается тем, что аппроксиматор содерж11 Т интерполяторы верхней и нихшей лишш графика и два триггера, единичные входы которых подсоединены к первому выходу блока сч1ггьгоания графической информашш, а выходы и нулевые входы подтопочены ко входам включешш и первьм выходам соответственно интерполяторов верхней и нижней линии графика, входы изменения уставки и вторые выходы интерполятора верхней и ннжней линии графика соединены с соответствующими выходами и входами блока управления.
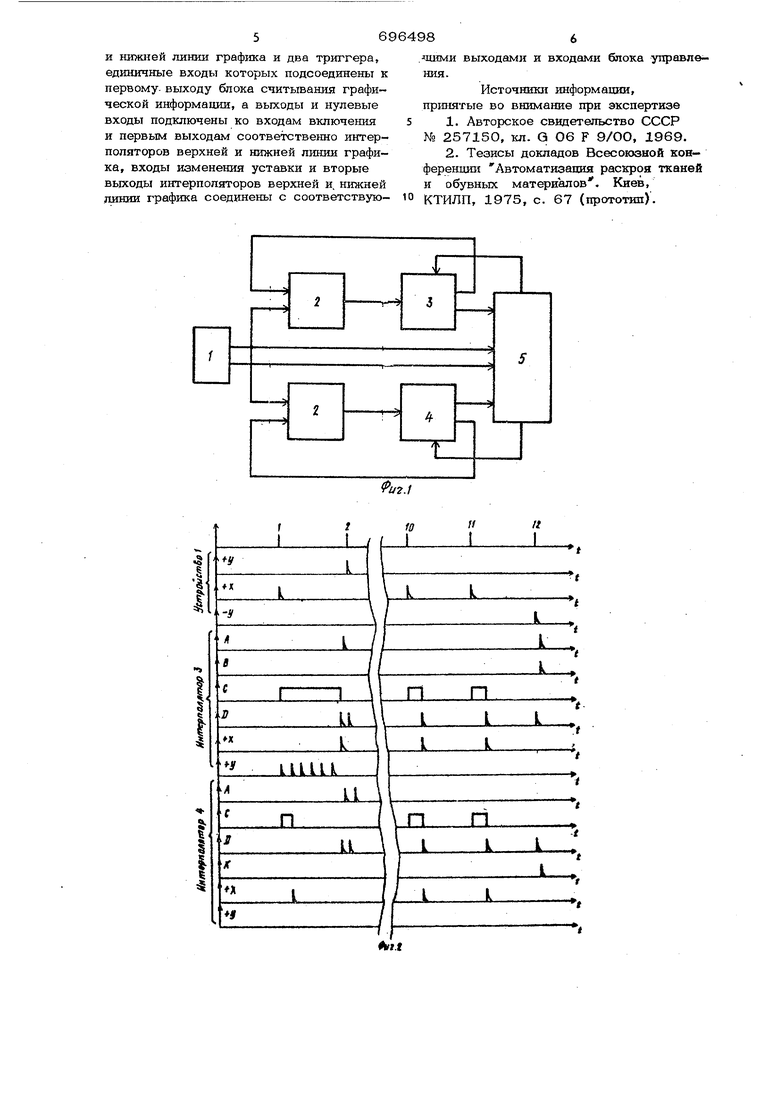
На фиг. 1 изобрансена структурная схема аппроксиматора; на фиг. 2 представлены временные диаграммы его работы, которые поясняются фиг. 3 .
Аппроксиматор содержит блок 1 счи- тьтания графической информашш, два PS-триггера 2, интерполятор 3 верхней линии графика, интерполятор 4 нюкней ли нии графика и блок 5 управления. Следует отметить, что в аппроксимато ре информация о координатах X и У точки обрабатывается в виде приращеюай координат по сравнению с конечной точкой предыдущего.аппроксимафующего отрезка, что равноценно переносу для каждого интервала аппроксимации начала координат в начальную точку аппроксимирующего отрезка. Начальной установкой в интерполятор 3 записывается Xj, 1, y igdi-t5 а в интерполятор 4 запксьшается Х„ 1, , где - максимально возм ожшлй угол наклона считьтаемой кривой; 9 - погрешность аппроксимации. При считьгоании информации о контуре с выходов блока 1 сигналы о единичных приращениях координат У подаются на вход блока 5 управления, а координаты X на вход установки в.единицу триггеров регистра 2. Таким образом, после считывания информации о единичных приращениях по координате X выходные сигналы триггеров 2 включают интерполяторы 3 и 4, которые будут работать до тех пор, пока на их выходах также появится сигнал о единичном пр1фащении по оси X. За это время в интерполяторе 3координата Х станет равной 1, а У - величине tg оС + fi соответствеьгао для интерполятора 4; Х2. 1, y2 -tga---S . Процесс изменения-координат показан на фиг. 3 стрелками для случая, когда tgoi. . После обнуления обоих триггеров 2 сформулируется импульс, по которому с выходов интерполяторов поступят коды величин У ,. У .-Для первой точки обязательно выполняются условия У +6 и 3 Cj + S, поэтому появятся импульсы на выходах блока 5, и в качестве X.,, ЗС в интерполятор 3 записывают ся координаты точки А: Хд , Уд , а в интерцолятор 4 - точки W : Х, X/v . В таком случае каткдый интерполятор, если он будет включен, будет в виде еди ничных приращений воспроизводить прямую, проходяиую через начало координат и точку с вьпиеуказанными координатами (уставку), т.е. интерполятор 3 будет воспроизводить прямую L , а интерполятор 4 - L. 2 При переходе блока считывания ко второй точке работа аппроксиматора аналогична вышеописанной (фиг, 2), при этом уставрами станут точки С и S . При шаге по У будет сформирован им луяыз на выходе блока 5, по которому 6 84 сразу производится выдача У , « 2. сравнение и, если это необходимо, запись новых значенийXj, У (фиг. 2). Здесь для интерполятора 3 уставкой останется точка С, так как У Ур+в, а для интерполятора 4 станет точка Т. Таким образом, интерполяторы работают в следящем режиме и вырабатывают информацию о координатах точек двух прямых, лежащих одка вьпие (интерполятор 3), другая ниже {интерполятор 4) аппрок;симируемой кривой, причем одна из координат (в нашем случае X) совпадает с координатой точки считьгоания Хр, лежащей на кривой. Так работа происходит Ёплоть до считьтания последней точки (фиг. 2, 3). При этом нижний луч будет оставаться неизменнь5м, а верхний будет поворачиваться. После считьгоания последней точки в качестве Х,, У интерполятора 3 будут приняты координаты точки N : Хц, , У| . При этом установится 3 5 . ,Тогда станет У s 3 , а импульс с блока 5 произведет начальную установку интерполяторов 3 и 4 и опросит их. При этом Х, и У| выдаются в качестве приращений очередного аппроксимирующего отрезка. Таким образом, схема готова к определению следующего аппроксимирующего отрезка. Из данного описания видно, что изменение координат уставок приводит к тому, что угол между двумя прямыми будет уменьшаться таким образом, чтобы точки, лежащие на прямой были удалены от кривой на расстояние не более & , при этом каждая прямая содержит хотя бы одну точку, удаленную от кривой на рас ояиие В . Равенство У . yg говорит о том, что отрезки прямых совпали, т.е. получен отрезок, все точки которого удалены от кривой на расстояние меньше & , а две - на расстояние равное 8 , т.е. он является отрезком прямой, аппроксимирующей данный отрезок кривой, с заданной погрешностью 8 наилучшим образом . Формула изобретения Линейный аппроксиматор, содержащий блок считывания графической.информации, первый и второй выходы которого подключены к соответствующим входам блока управления, отличающийся тем, что, с целью упрощения аппроксиматора, он содержит интерполяторы верхней 56 и нижней линии графика и два триггера, единичные входы которых подсоединены к первому, выходу блока считывания графической информации, а выходы и нулевые входы подключены ко входам включения к первым выходам соответхзтвенно интерполяторов верхней и нижней линии графика, входы изменения уставки и вторые выходы интерполяторов верхней и. нижней линии графика соединены с соответствую8шоли выходами и входами блока управления. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 257150, кл. Q 06 F 9/ОО, 1969. 2.Тезисы докладов Всесоюзной конференции Автоматизация раскроя тканей и обувных материалов. Киев, КТИЛП, 1975, с. 67 (прототип).
Фиг.
