1
Изобретение относится к машиностроению и может быть использовано для частичной автоматизации рабочего цикла машин манипуляторного типа, например лесозаготовительных.
Известны устройства управления манипуляторами, включающие рукоять управления, геометрически подобную манипулятору и связанную через канатно-блочную систему со следящими золотниками 1.
Известно также устройство управления мащиной манипуляторного типа, включающее шарнирно сочлененные между собой поворотную колонну, стрелу с установленным на ней пантографным механизмом и рукоять, а также приводы их перемещения в виде гидроцилиндров, управляемых от гидрораспределителя, связанных рычагами управления 2.
Недостатком данных устройств является низкая производительность и значительная нагрузка на оператора, возникающие в процессе управления мащиной.
Цель изобретения - повыщение производительности и облегчение труда оператора.
Это достигается тем, что устройство снабжено фиксаторами положения рычагов управления, а на колонне установлен кулачок, с которым кинематически связаны фиксаторы положения рычагов управления, причем фиксатор рычага распределителя гидроцилиндра поворота колонны кинематически связан с пантографным механизмом.
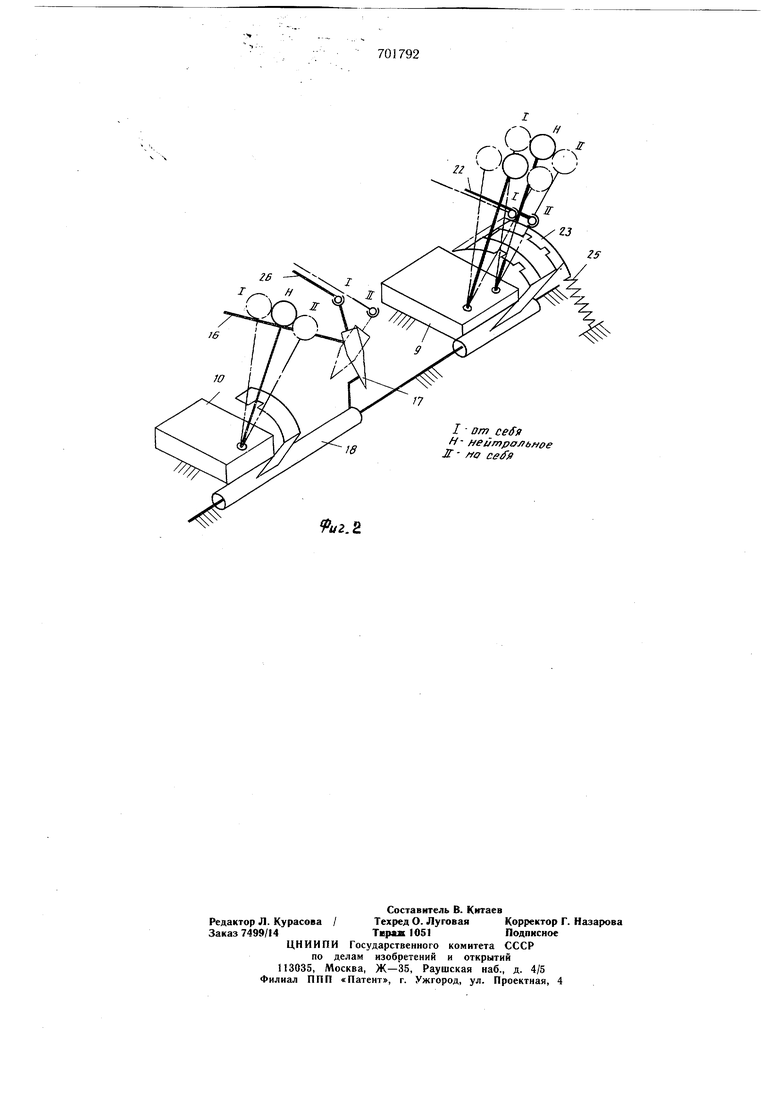
На фиг. 1 показана принципиальная схема устройства; на фиг. 2 - расположение органов .управления в разных рабочих положениях.
Устройство содержит стрелу, состоящую из двух звеньев 1 и 2 с гидроцилиндрами 3 и 4. Стрела установлена щарнирно на поворотной колонне 5, которая снабжена гидроцилиндром 6 для ее поворота. На конце стрелы шарнирно подвешено за.хватно-срезающее устройство 7 и гидроцилиндр егс поворота 8. Гидроцилиндры 3 и 4 трубопроводами соединены с гидравлическим распределителем 9, а гидроцилиндр 6 с распределителем 10.
На стреле установлен пантографный механизм, например, с гибкой связью 11, ролик 12 которого в определенном масштабе копирует траекторию перемещения шарнира 13 подвески захватно-срезающего устройства. На колонне 5 с возможностью взаимодействия с роликом 12 шарнирно установлен рычаг 14, который через тягу 15 и рычаг 16 соединен с кулачком 17, шарнирно закрепленным на рычаге 16. Кулачок 17 посредством фиксатора 18 положения связан с рукояткой распределителя 10. На поворотной колонне 5 неподвижно установлен кулачок 19, который через ролик 20, рычаг 21 и тягу 22 соединен с поворотным фиксатором 23 положения. Носледний выполнен с возможностью взаимодействия с рукоятками распределителя 9 при помощи пазов на рабочих поверхностях. Зацепление рукояток распределителей 9 и 10 с пазами фиксаторов 18 и 23 обеспечивается тем, что рычаги рукояток подпружинены и являются подвижными в поперечном направлении к направлению движения управления. Сиденье 24 оператора располагается напротив рычагов распределителей. Контакт ролика 20 и кулачка 19 обеспечивается пружиной 25, жесткость которой на порядок выше суммарной жесткости пружин, центрирующих золотники распределителя 9. Кулачок 17 посредством упругой тяги 26 соединен с рычагом 21. Пружина 27 соединена с рычагом 16 и предназначена для подъема кулачка 17. Устройство работает следующим образом. После захвата и срезания дерева (при использовании манипулятора в лесозаготовительных машинах) рычаги распределителя 9 включаются оператором «На себя (фиг. 2) с целью уменьшения вылета стрелы. Рычаги вставляются в зацепление с верхними пазами фиксатора 23. Траектория перемещения захватно-срезающего устройства управляется при помощи пантографного механизма. По мере сокращения вылета стрелы ролик 12 пантографного механизма приближается и поворачивает рычаг 14 и, соответственно, через тягу 15 и рычаг 16 перемещает кулачок 17 вниз. Кулачок -17 взаимодействует с фиксатором 18, который, в вою очередь, переключает рычаг распределителя 10 в положение «От себя (фиг. 2) и тем самым автоматически включает поворот колонны со стрелой и срезанным деревом в сторону позиции выгрузки, например на коник. До достижения направления выгрузки кулачок 19, закрепленный на поворотной колонне, нажимом на ролик 20, посредством рычага 21, тяги 22 и фиксатора 23 реверсирует рычаги распределителя 9 в положение «От себя (фиг. 2) и тем самым включает подачу масла в гидроцилиндры 3 и 4 для увеличения вылета стрелы, что необходимо для выгрузки срезанного дерева, например на коник. При этом под воздействием кулачка 19 через рычаг 21 и тягу 22 фиксатор 23 автоматически занимает другое положение по сравнению с положением до поворота колонны в сторону позиции выгрузки, а через рычаг 21 и упругую тягу 26 кулачок 17 поворачивается в противоположном конечном положении, предназначенном для включения обратного поворота колонны после выгрузки. Остановка увеличения вылета стрелы и операция выгрузки осуществляется оператором при помощи ручного управления рычагами соответствующих распределителей. После выгрузки с целью уменьшения вылета стрелы оператор ставит рычаги распределителя 9 в зацепление с нижними пазами фиксатора 23. По мере уменьшения вылета стрелы ролик 12 заново нажимает на рычаг 14, который посредством тяги 15 и рычага 16 перемещает кулачок 17 вниз. Кулачок, перемещаясь вниз, уже другой стороной нажимает на рычаг фиксатора 18 и переключает рычаг распределителя 10 в положение «На себя. Тем самым включается подача масла в гидроцилиндр 6 для обратного поворота колонны 5 в исходное положение для захвата и срезания следующего дерева. Обратный поворот колонны, необходимый для наведения захватно-срезающего устройства на следующее дерево, прекращается по необходимости оператором путем включения при помощи рычагов распределителя 9 подачи масла в гидроцилиндры 3 и 4 стрелы. По мере увеличения вылета ролик 12 уходит от рычага 14, который через тягу 15 и рычаг 16 позволяет пружине 27 поднять кулачок 17 вверх. Освобожденный фиксатор 18 с рычагом распределителя 10 автоматически возвращается в нейтральное положение под воздействием усилия центрирующей пружины золотника распределителя. Настройкой определенного перекрытия по времени движений управляющих механизмов можно добиться плавного без рывков и лишних остановок перемещения звеньев рабочего оборудования. Формула изобретения Устройство управления машиной манипуляторного типа, включающее шарнирно сочлененные между собой поворотную колонну, стрелу с установленным на ней пантографным механизмом и рукоять, а также приводы их перемещения в виде гидроцилиндров, управляемых от гидрораспределителей, связанных с рычагами управления, отличающееся тем, что, с целью повышения производительности и облегчения труда oneратора, устройство снабжено фиксаторами положения рычагов управления, а на колонне установлен кулачок, с которым кинематически связаны фиксаторы положения рычагов управления, причем фиксатор рычага распределителя гидроцилиндра поворота колонны кинематически связан с пантографным механизмом.
//
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 377299, кл. В 25 J 3/00, 1973.
2.Авторское свидетельство СССР 230030, кл. Е 02 F 9/22, 1966 (прототип).
8
13
a.f
U2.Si
/ от ceSg fi нейтральное Jf o ceifff


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Система управления манипулятором | 1981 |
|
SU990503A2 |
| Манипулятор лесозаготовительной машины | 1979 |
|
SU791517A1 |
| Система управления гидравлическим манипулятором лесозаготовительной машины | 1979 |
|
SU861063A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2116025C1 |
| БАЗОВЫЙ МОДУЛЬ МАНИПУЛЯТОРНОЙ МАШИНЫ | 2012 |
|
RU2522496C2 |
| Способ разработки лесосеки и лесозаготовительная машина для его осуществления | 1990 |
|
SU1738158A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2127038C1 |
| Манипулятор лесозаготовительной машины | 1978 |
|
SU676235A1 |