Изобретение относится к системам управления манипуляторами, используемыми в лесной промышленности на заготовке леса.
По основному авт. св. 884997 известна система управления манипулятором, включающая гидропривод, имеющий гидаюцилиндры поворота манипулятора, шарнирно-Еяачажнрго механизма и стрелы, управляющий орган, вы-; полненный в виде поворотного относительно двух взаимно перпендикуляр- ных осей Прицепа, который кинематически связан с двумя дроссельными cji&RsWfitax золотниками, подключенными, соответственно, к гидроцилиндрам колонны манипулятора и шарнярно-рычажного механизма и имеющими с соответствующими гидроцилиндрами поворота обратной связи, которые вьшолнеиы в виде вспо1«: гательных гидроцилиндров, подключенных параллельно к гидроцилиндрам поворота и кине- матически. связанных с дроссельными слеяя1цйми золотникамиСх }.
Однако известная система управления манипулятором вследствие несоьпбздения вертикальной оси поворота прицела с осью поворота колонны манипулятора, не позволяет осуществить точную наводку рабочего органаv на деревья, находящиеся в одной «ертикальной плоскости, проходящей через визирную линию прицела, так как в этом случае при одном угле поворота прицела в горизонтальной плоскости необходимо поворачивать колонну манипулятора на рзличные углы в за10висимости от расстояния деревьев ;от оси колонны. Кроме того, в такой системе управлений манипулятором не достигается согласойанная работа гид-; роцили,ц;щюв поворота колонны манипулятора и шарнирно-рычажного меха15низма с срответствуккцими вспомогательными гидроцилиндрами. Это объясняется тем, что при постоянных по- . Лезных нагрузках на вспомогательные гидроцилинды на гидроцилиндры пово20рота колонны манипулятора и шарнщ норьгаажного механизма действуют переменные полезные нагрузки, зависйщие от массы перемещаемого дерева, скоростей и ускорений перемещения. Рас25согласованность в работе гидроцилиндров поворота и вспомогательных гидроцилиндров также снижает точность наводки рабочего органа на деревья.Все это снижает надежность системы
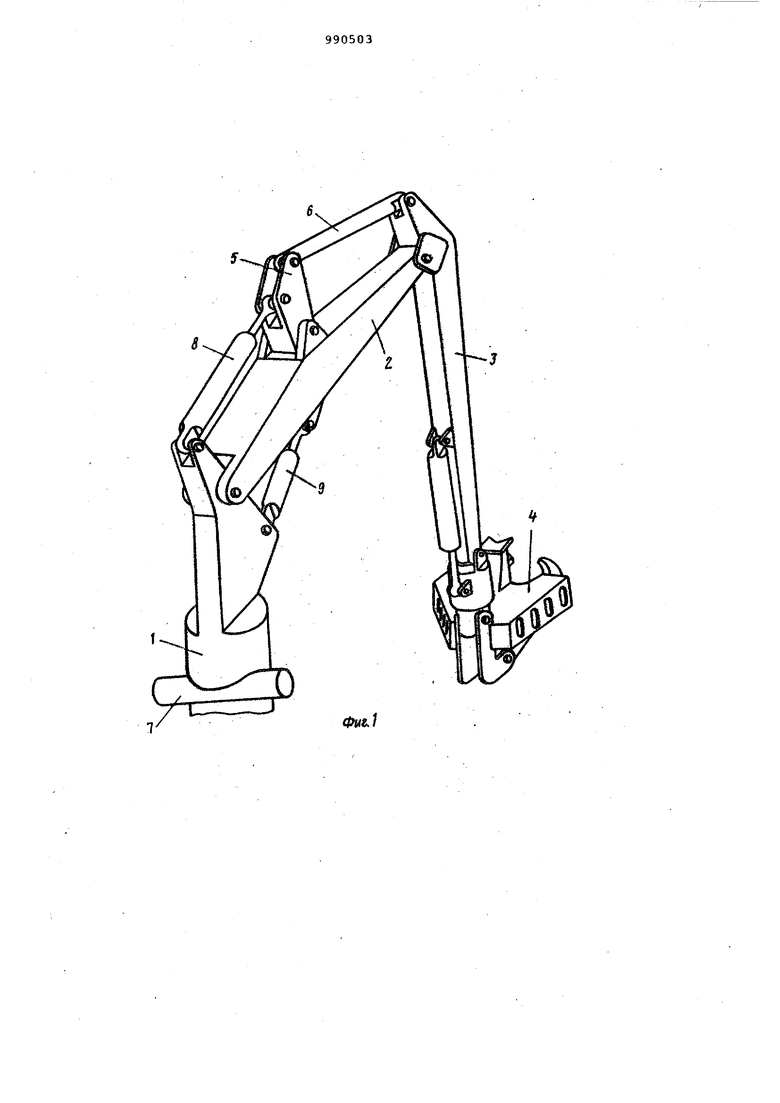
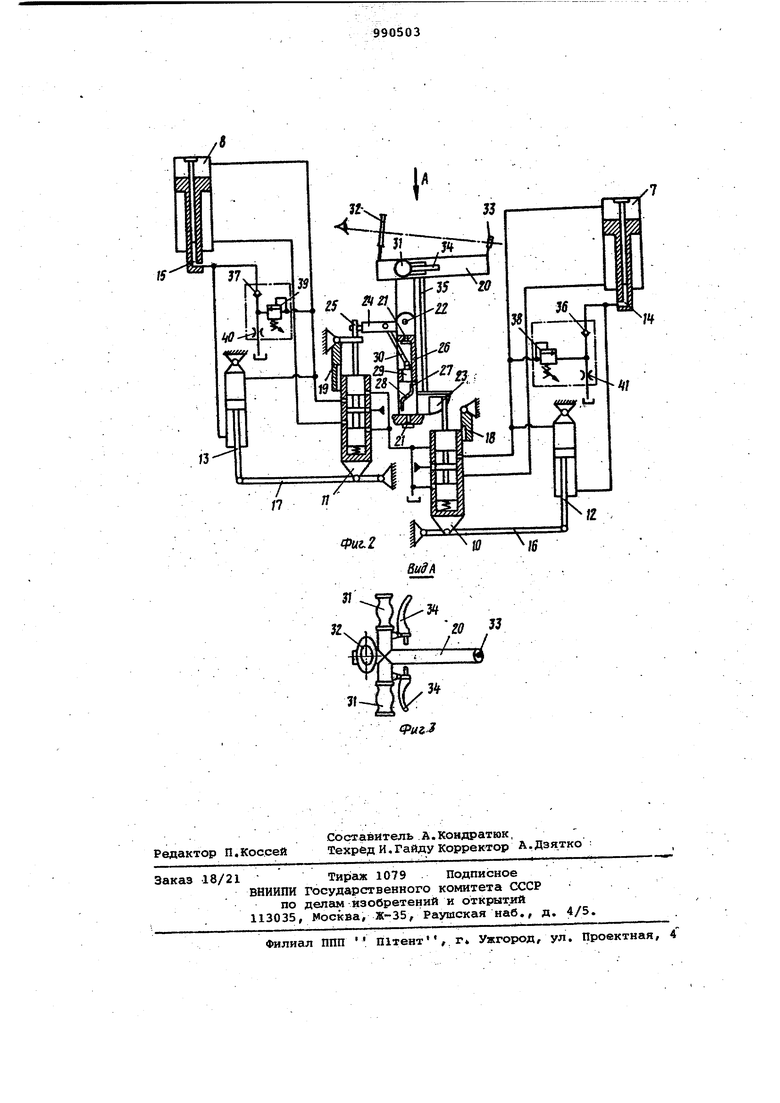
30 управления манипулятора. Целью изобретения является повышение надежности. Для этой цели кинематические связи золотников соединены между собой посредством поворотной относителйно одной из осей поворота прицела полой втулки с винтовыми пазами, установленного во втулке ползуна с пал цем , расположенным в этих пазах, и тяги, соединенной с ползуном, причем гидроцилиндры поворота колонны манипулятора и шарнирно-рычажного механизма выполнены в виде дозаторов к дозирующим полостям которых подклю чены соответствующие по рабочему объ му полости вспомогательных гидродилиндров. На фиг, 1 схематично изображен ма нипулятор лесозаготовительной машины на фиг. 2- система управления манипу лятором; на фиг. 3 - вид А на фиг. 2 Система управления манипулятором, который включает смонтированную на поворотной колонне 1 стрелу 2,.рукоять 3 с рабочим органом 4,- имеющим привод его поворота, шарнйрно-рычажный механизм, состоящий из соединенного со стрелой рычага 5 и соединенный с рукоятью тяги б, содержит гидропривод с .гидроцилиндром 7 поворота колонны, гидроцилиндром 8 поворота шарнирно-рычажного механизма, гидроцилиндром 9 поворота стрелы. Гидроцилиндры 7 и 8 поворота колонны и шарнирно-рычажного механизма соедине ны трубопроводами с дроссельнымисле дящими золотниками 10 и 11, сливные полости которых соединены сливной магистралью с насосами, создающими давление нагнетания жидкости Рц. К гидроцилиндрам 7 и 8, выполненным в виде дозатора/ подключены параллельно вспомогательные гидроцилиндры 12 и 13 небольших размеров, причем дозирующие полости 14 и 15 гидро цилиндров 7 и 8 подключены к соответ ствующим по рабочему объему полостям вспомогательных Гидроцилиндров 12 и 13. Такое подключение вспомогательных гидронилинлгюв 12 и 13 к гидроцилиндрам 7 и 8 обеспечивает согласованное перемещение штоков гидроцилйндров 7 и 12, 8 и 13 с пропорциональными скоростями. Штоки вспомогательных качающихся гидроцилиндров 12 и 13 и дроссельные следящие золот ники 10 и 11 соединены шарнирно с ка чающимися рычагами 16 и 17, установленными в кабине оператора лесозаготовительной JVIaшины. Кроме того, дрос сельные следящие золотники 10 и 11 установлены в качающихся направляннци 18 и 19. кабине оператора установлен прицел 20,поворотный О1 носитель но двух взаимно перпендикулярных осей 21 и 22. На прицеле смонтирова.ны заданадие кулачки 23 и 24, один из которых снабжен роликом 25 и контактирует при помощи ролика с золотником 11,, а другой имеет винтообразную поверхность, контактирующую с золотником 10 и выполнен с полой втулкой 26, установленной на прицеле с возможностью поворота относительно оси 21. Втулка 26 снабжена.винтообразными пазами 27, в которых установлен палец 28, соединееный шарнирно при помощи ползуна 29, установленного в полости втулки, и тяги 30 с задающим кулачком 24. Прицел 20 снабжен ручками 31, сеткой 32 и мушкой 33. Параметры системы управления расчитаны так, что визирная линия, проходящая через центр сетки 32 и мушку 33, определяет начальное над коником лесозаготовительной маштны к конечное положение рабочего органа 4 при наведе-; НИИ его на дерево, находящееся на различнЕфс расстояниях от колонны манипулятора ь в пределах рабочей зоны обслуживания. Для облегчения работы оператора рукоятки управления остальными гидроцилиндрами манипулятора могут быть смонтированы также на прицеле, например в виде .поворотных ( ручных рычагов 34, соединенных глбки ми тросами 35 с соответствующими эо-лОтниками. Для компенсации утечек жидкости в, системе, которые могут возникнуть в дозирующих полостях цилиндров и привести к нарушению согласованного дни-; жения штоков гидроцилиндров поворота и вспомогательных гидроцилиндров, в системе предусмотрены обратные клапаны 36 и 37, напорные золотники 38 и 39, дроссели 40 и 41, взаимодействие которых восстанавливает первоначаль.« ный объем жидкости в замкнутых контурах между дозирующими полостями гидроцилиндров поворота и соответствующими полостями вспомогательных гидроцилиндров. Система управления манипулятора работает следующем образом. Для захвата и срезания дерева оператор производит наводку рабочего органа 4 на срезаемое дерево. Для этого он поворачивает прицел 20 за ручку 31 вокруг осей 21 и 22 до положения, при котором визирная линия, проходящая через центр сетки 32 и мушку 33, проходит через нижнюю часть ствола перерезаемого дерева, которая должна быть захвачена рабочим органом 4. -При повороте прицела 20 поворачиваются задающие кулачки 23 и 24, один из которых, воздействует своей винтообразной по.верхностью на дроссельный .Золотник 10, а другой - через ролик 25 на дроссельный следящий золотник 11 и через тягу 30 перемещает во втулке 26 ползун 29 и связанный .ним палец 28, который, (воз действу и на винтообразные пазы 27, поворачивает втулку 26 с задающим кулачком 23 относительно оси 21 на дополнительный угол в том или ином направлении в зависимости от направления поворота прицела и расстояния дерева от поворотной колонны. Задающий кулачок 23, воздействуя при повороте на золотник 10, переводит его в положение подачи жидкости в одну из полостей гидроцилиндра 7 поворота колонны манипулятора и вспомогатель1ного качающегося гидроцилиндра 12 или в одну из полостей гидроцилиндра 7 и из дозирующей полости 14 в ic6&TBe t ,сТвукяаую по рабочему объему полость гидроцилйндра 12 в э ависимости от направления поворот прицела 20 в горизонтальной плоскости. Задцакящй кулачок 24, воздействуя при повороте на золотник 11, переводит его в положение подачи жидкости в одну из полостей гидроцилиндра 8 поворота шарнирно-рычажного механиа 1а и вспомогательного качающегося гидроцялиндра 13 или в одну из полостей гидроТщлиндра 8 и из дозирукдцей полости 15 в.соответствукидую по рабочему объему полость гидроцилиндра 13. При этом штоки гидроцилиндров 7и12,8и13 перем& аются согласованно с пропорциональными скоростями на величину, пропорциональную перемещению задающих кулачков 23 и 24, до положения, при котором качающиеся рычаги 16 и 17 переводят -золотники 10 и 11 в запертые положения, причем за счет выполнения следящих золотников дроссельными перемещение поворотных гидроцилиндров рабочего органа 4 .в начале происходит ускоренно, а в конце замедленно. При возникновении утечек в замкнутых контурах, образованных дозирукицими полостями и соответствукнцими полостями вспомогательных гидроцилиндров, -раздается давлением ниже атмосферного.. Восстановление прежнего объема жидкости в замкнутых контурах происходит после каждого двойного хода поршней через напорные золотники 38 и 39, -. обратные клгшаны 36 и 37, вследствие подпорного давления, которое создается дррсселями 40 и 41. Одновременно с поворотом прицела 20 при помощи соответствующего поворотного ручного рычага 34 вкл 9чавтся гидроцилиндр 9 поворота стрелы 2, при перемещении штока ifoTOporo производится перемещение рабочего органа 4 в продольной плоскости манипулятора к срезаемому дереву по заданной траектории до совмещения с визирной линией, когда производится его остановка. После отделения ствсхпа дерева от ПИЯ обратнЕЛМ повороте прицела 20 и включением другой погости гид- родилиндра 91 поворота стрелы проиэводят перемещение комлевой части наj aBJjeHHO падающего дерева в коник лесозаготовительной машины до совмещения рабочего органа 4 с визирной линией прицела 20, Эффе стивяость предложенной системы управления манипулятором состоит в повниеяии точности наводки рабочего органа на деревья и повыше- НИИ ее надежности. Использование предлагаемого устройства позвЪляёт : повысить производительность труда на валке и- йакётйрбвании деревьев. Формула изобретения Система управления манипулятором по авт. св. В 884997, о т л и ч аю щ а я с я тем, что, с целью повью1ения надежности, киншлатические : связи золотников соединены между со- бой посредством поворотной ртносительво одной из осей поворота прицела полой втулки с винтовыми пазами, установленного во втулке ползуна с паль- цем, расположенным в этих пазах, и тяги, соединенной с ползуном, пpичe 4 гидроцнлинда поворота колонны манипулятора и шарнирно-рычажного механизма вышолнены в виде дозаторов, k дозируюедим полостям которых подключены соответствующие по рабочему объему полости всцрмрзгательных гйдаЗ - ЛИНдров. Источники информации, принятыево внимание при экспертизе 1.Авторское свидетельство СССР № 88499 ;. КЛ. В 25 J 5/00, 1980.
tS
J3
55
П
18
fZ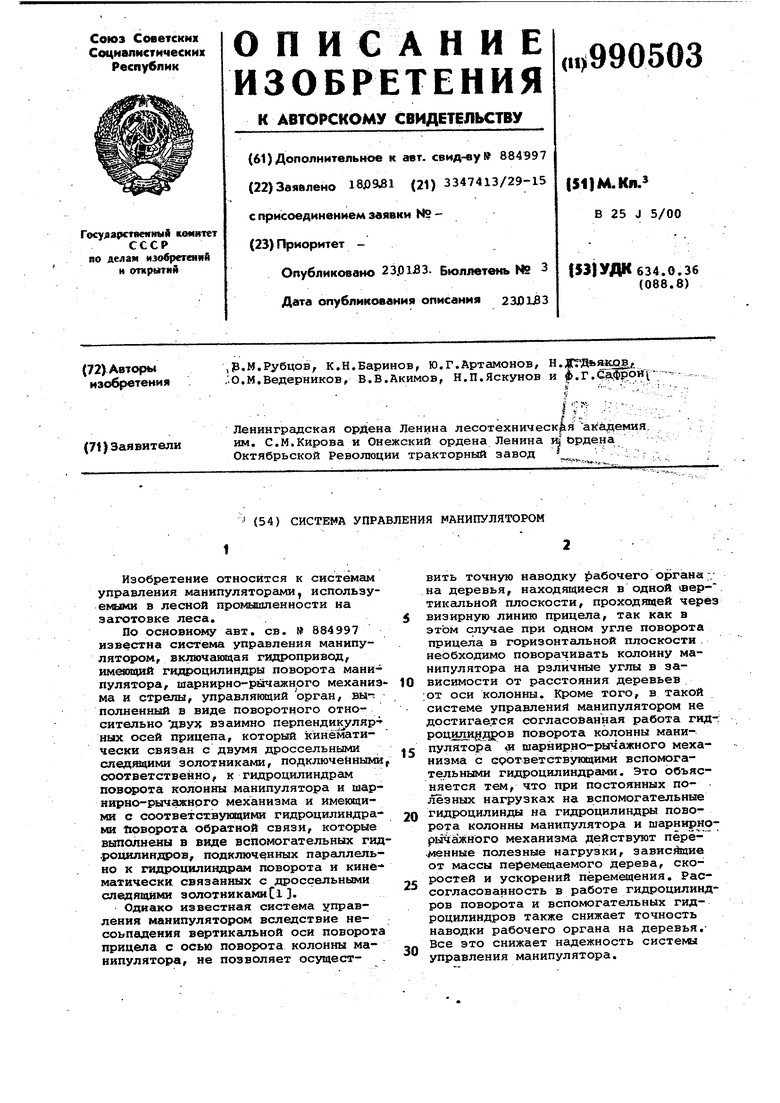
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| Манипулятор | 1980 |
|
SU897495A1 |
| Манипулятор лесозаготовительной машины | 1979 |
|
SU791517A1 |
| Манипулятор лесозаготовительной машины | 1978 |
|
SU676235A1 |
| Манипулятор лесозаготовительной машины | 1975 |
|
SU545301A1 |
| Система управления гидравлическим манипулятором лесозаготовительной машины | 1979 |
|
SU861063A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Манипулятор лесозаготовительной машины | 1975 |
|
SU538696A1 |
| Захватно-срезающее устройство лесозаготовительной машины | 1980 |
|
SU865222A1 |
| Захватно-срезающее устройство лесозаготовительной машины | 1981 |
|
SU959689A1 |