(54) ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМАт | 1972 |
|
SU428358A1 |
| Преобразователь угловых перемещений в код | 1975 |
|
SU532876A1 |
| ЦИКЛИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГОЛ — КОД | 1972 |
|
SU425200A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Цифро-аналоговая следящая система | 1976 |
|
SU572774A1 |
| ДВУХОТСЧЕТНЫЙ ПРЕОБРАЗОВАТЕЛЬ КОД - УГОЛ | 1973 |
|
SU408353A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Преобразователь код-угол | 1976 |
|
SU693416A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Цифровая следящая система | 1977 |
|
SU682872A1 |
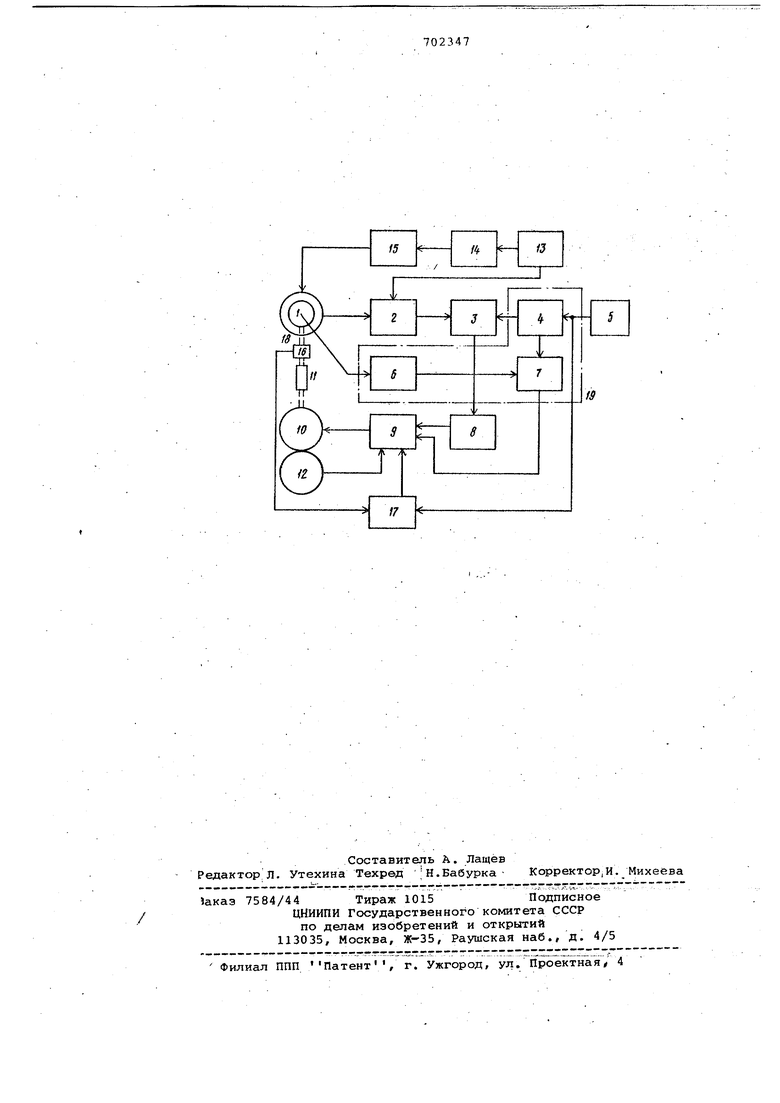
. .1 Изобретение относится к области автоматики и вычислительной техники и может быть использовано в проектировании автоматических устройств. Известна цифровая следящая система по основному авт. ев, № 428358,Г. в которой в качестве чувствительного элемента использован фазовращатель точного отсчета, выполненный на базе многополнхзного сииусно-косинусного трансформатора (СКТ). Вместо канала грубого отсчета использовано ycTipoffство шагового отсчета, состоящее из формирователя импульсов, вход которо го подклйчен к синусной обмотке многопопюсного СКТ, являющегося базовым ёлементом фазовращателя точного отсчёта, прёЪбразователя кода, вход i oToporo соединен с ЦВМ, и сравнйбанвдего устройства, два входа которо го соответственно соединеннее выходом формирователя импульсов и с преобразователем кода, а выхЬд срайнйВаквдего устройства соединён со входо усилителя. Недостатком такой цифровой следя{цей системы является необходимость начальной выставки отрабатывающей оси перёд каждым ее включением, что требует дополнительной аппаратуры и ограничивает возможность ,использо-. вания системы при наличии перерыва в работе. Целью изобретения является расширение области применения системы. Эта цель достигается тем, что в предложенную цифровую следящую систему введены сигнализатор положения и блок управления, к первому и второму входам которого подключены соответственно выходы ЦВМ и сигнализатора положения, механически соединенного с отрабатывающей осью, а выход блока управления подключен к Одному из входов усилителя. На чертеже представлена функдао-нальная схема цифровой следяЕцей системы, где обозначены фазовращатель 1 точного отсчета, преобразователь 2 фаза-код точного отсчета, сумматор 3 точного отсчёта, преобразователь кода 4, ЦВМ 5, формирователь импульсов 6, сравнивающее устройство 7, преобразователь код-напряжения 8, усилитель 9 двигателя, двига-Гепь 10, редуктор 11, тахогенератор 12, генератор импульсов 13, делитель частоты 14, усилитель 15 напряжения питания, сигнализатор положения 16, блок управления 17, отрабатывающая ось 18, устройство 19 Шагового отсчета. Устройство ра.ботает следующим образом.. В начальный момент включения цифр вой следящей системы по сигналу с .блока 17 управления поступает сигнал через усилитель 9 на двигатель 10, поворачивающий через редуктор 11 отрабатывающую ось 18, на которой установлен фазовращатель точного отсче та 1/ в фиксированное положение, определяемое поступлением сигнала с сигнализатора положения 16. В качест ве фиксированного положения может быть, использовано нулевое-положение рри наличии нуль-контактов, предельное положение при наличии упоров и д Дальнейшее приведение обрабатываю щей оси 18 на задаваемые от ЦВМ 5 уг поворота осуществляется от выставлен ного фиксированного положения. Дпя этой цели код угла с ЦВМ 5 поступает в преобразователь кода 4, где в первую очередь происходит вычитание кода угла, соответствующего фиксирован ному положению, а затем в зависимост от величины оставшейся части кода происходит приведение отрабатывающей оси 18 по Сточному каналу либо без устройства шагового отсчета 19, либо вначале с помощью устройства шагового отсчета 19, а потом по точному каналу. Отработка по точиому каналу осуществляется в тех случаях когда оставшаяся часть ода угла, поступившего с ЦВМ 5, после вычитания кода угла фиксированного положеВИЯ в преобразователе кода 4 будет меньше диапазона работы точного канала . . В этом случае код с преобразователя 4 поступаёт в сумматор точного отсчета 3. Затем разность кода посту пает в преобразователь код-напряМсение 8, который соединен со входом ус лителя 9 двигателя. С усилителя 9 на 1ряжёийе поступает на управлякядую обмотку двигателя 10 и он начинает через редуктор 11 приводить обрабатывающуго ось до такого положения,. когда код угла, выработанный преобразователем 2, сравняется с кодом угла, поступившим с ЦВМ 5, т.е. когда разность кода в сумматоре J будет равна нулю. Устройство шагового отсчета 19 включается в работу в тех случаях, когда оставшаяся часть кода ,угла, подступившего в ЦВМ 5, после вычитания кода угла, фиксированного в преобразователе кода 4, будет больше диапазона работы точного канала. При этом в преобразователе кода 4 оставшаяся часть кода преобразуется в число им-, пульсов, кратное содержащемуся в коде числу диа.пазонов работы точного канала, и дополнительно в код точного от счета. Обработка угла в этом случае происходит вначале, по сигналу от сравнивающего устройства 7, поступагаце- му на усилитель 9. . Поступление сигнала со сравнивающего устройства 7 прекращается при равенстве количества импульсов, поступивших от ЦВМ . 5 , количеству импулЬсов, выработанных формирователем им-; пульсов б. Дальнейшая отработка угла осуществляется по точному каналу как описано выше. Введение сигнализатора положения 16 и блока управления 17 позволяет обеспечивать работу одноканальной . цифровой следящей системы с высокой точностью в диапазоне 360 и одновременно сократить количество применен-, ных элементов и уменьшить габариты и вес системы. Формула изобретения Цифровая следящая система по. авт. ев .. № 428356, t отличающаяс я тем, что, с.целью расширения области применения системы, она содержит сигнализатор положения и блок управлёния, к первому и второму входам которого подключены соответственно выходы ЦВМ и сигнализатора положения, механически соединенного с отрабатывающей осью, а ёНход блока уп. равления подключен к одному извходов усилителя.
