(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU962844A1 |
| Следящая система | 1980 |
|
SU883861A1 |
| Следящая система | 1990 |
|
SU1829023A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Следящая система | 1988 |
|
SU1529175A2 |
| Устройство для комбинированного числового программного управления | 1980 |
|
SU911469A2 |
| Следящая система | 1981 |
|
SU968783A2 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
| Многоканальный преобразователь код-угол | 1973 |
|
SU486344A1 |
| Следящая система | 1990 |
|
SU1764030A1 |
I / .
Il3o6peTeHHi6 относится к области автоматического регулирования и может быть использовано в радиотехнике и приборостроении.
Известны следяшие системы, содержащие блок сравнения, корректирующее устройство, первый и второй усилители и нсПолнительный двигатель, охваченный скоростной обратной связью, в которых осуществляется переключение коэффи&нента обратной связи в зависимости от уровня модуля сигнала рассогласования Ц . Из известных следящих систем, наиболее близкой по технической сущности является следящая система, содержащая последовательно соединенные блок сравнения, корректирующее устройство, и второй усилители и исполнительный двигатель, первый выход которого через последовательно соединенные Tiaxoгенёратор и первый масщтабирующий блок подключен ко второму входу второго усилителя, а второй выход через редуктор подключен к одному из входов
блока сравнения, выход первого усилвтеля через последовательно соединенные блок офатной связи, коммутатор в второй масщтабирующий блок подключен ко втекрому входу первого усилителя, а выход блока сравнения через последовательно соединенные первый блок выделения модуля и первое порог юое устройство подключен к первому управлякшему входу
коммутатора Г4.
Недостатком известной следящей системы является плохое качество переходного процесса и его большая длительность в режиме синхронизации и при ступенчатом входном воздействии.
Целью настоящего изобретения является улучщение качества переходного процесса и повыщение быстродействия системы. Это достигается тем, что в предлагаемой системе установлены второе пороговое устройство и второй блок выделения модуля, вход которого соединен с выходом тахогенерат ра, а выход через второе пороговое устройство
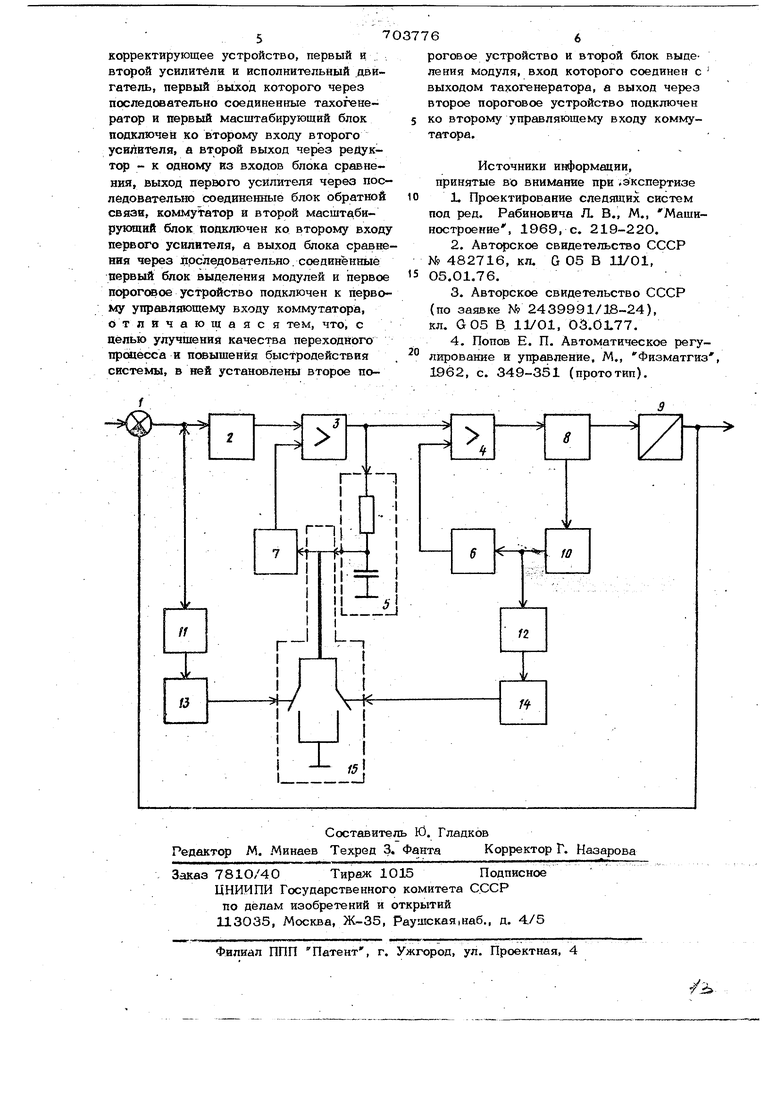
/ подключен ко второму управляющему вхс ду коммутатора. Блок-схема устройства представлена fta чертеже, где п риняты следующие обозначения: блок. 1 сра1внения, коррект рующее устройство 2, первый и второй усилители 3, 4,блок 5 обратной связи первый и второй масштабирующий блоки 6, 7 , исполнительный двигатель 8, редуктор 9, тахох нератор 10, первый и второй блоки 11, 12 выделения модуля, первое и второе пороговое устройства 13, 14 коммутатор 15. Следящая система работает следующим образом. В режиме слежения с усилителя 3 (усилителя напряжения) снимается сигнал компенсации. Через блок 5 обратной связи (инерционное звено) этот сигнал поступает на вход второго масщтабирую щего блока 7, с выхода которого сигнал масштабированный до величины скоростной ошибки, подаётся со знаком (+) на вход усилителя 3. При йтом происходит компенсация скоростной составляющей ошибки системы. С помсяцью масштабирующего блока 6 (делителя напряжения) устанавливается необходимая глубина отрицательной обратной связи, котррая уменьшает ошибку от ухода Параметров усилителя 4 (усилителя мощности) и исполнительного; двигателя S при изменении внешних условий до требуемой величины. Когда на вход следящей системы сиг нал ие поступает, на второй управляющи вход коммутатора 15 поступает открыва щее напряжение и конденсатор блока 5 обратной связи (инверционного звена) разряжается. При этом корректирующая положительная обратная связь отключается, что ёлагоприятно сказывается на устойчивости следящей системы. При подаче на вход следящей систем единичного ступенчатого воздействия, переходный процесс будет соответствова переходному .процессу следящей сйстемы с жёсткой тахометрической отрицательной обратной связью, так .как корре тирующая положительная обратная связь в начальный момент отключена. При подаче на вход больших рассогласований (в десятки и сотни раз превышающих зону линейности следящей сис темы), а также при синхронизации следящей системы с больших углов рассоглассюания на первый управляющий ёход коммутатора 15 поступает открывающее напряжение, конденсатор блока 5 обратной связи (инерционного звена) разряжается. При этом корректирующая положительная обратная связь отключается, а подключение ее произойдет, когда ошибка системы уменьшится до величины, не превышаю|щей зоны линейности следящей системы с отключенной корректирующей положительной обратной связью. Качество переходного процесса и быстродействия значительно улучшаются. добизвестной следящей системе с ротностью по скорости KjT ЗС , постоянной времени инерционного звена 5 Т S 0,1 с, постоянной времени двигателя с учетом жесткой тахометрической обратной связью 1Q;6 О,О04 с при синхронизации системы с угла 8 величина перерегулирования составила 200%, длительность переходного процесса 1,5 с. Использсшание предлагаемого технического решения позволяет уменьшить перерегулирование в в-1О раз, а длительность переходного процесса в 7-8 раз. Блок 12 выделения модуля предназначен для выдачи сигнала одной и той же полярности при изменении знака скорости обработки, необходимого для срабатывания пс огового устройства 14. Блок 11 выделения модуля предназначен для выдачи сигнала одной и той же полярности при изменении знака ошибки следящей системы, необходимого для ерабатьшания порогового устройства 13, Корректирующее устройство, в качестве которого применяется усилительнопреобразотательное устройство, предназначено для подавления квадратурной сое-; тавляющей сйгнала рассогласования и иожет содержать предварительный усилитель, фазовый детектор и модулятор. Использование предлагаемого технического решения Позволяет улучшить качество переходного процесса в режиме син:хронизацйи и при ступенчатом входном воздействии и повысить быстродействие системы. Кроме того, при остандае системы происходит отключение корректирующей положительной обратной связи, что приводит к увеличению устойчивости системы. Формула изобретения Следящая система, содержащая последовательно соединенные блок сравнения. корректирующее устройство, первый и ,; второй усилители и исполнительный двигатель, первый выход которого через последовательно соединенные тахогенератор и первый масштабирующий блок подключен ко второму входу второго усилителя, а второй выход через редуктор - к одному из входов блока сравнения, выход первого усилителя через последовательно соединенные блок обратной связи, коммутатор и второй масштабирующий блок подключен ко второму входу первого усилителя, а выход блока сравне ния через дрследовательяо.соединенные первый блок выделения модулей и первое пороговое устройство подключен к первому управляющему входу коммутатора, Отличающаяс я тем, что, с Целью улучшения качества переходного npcaiecca и повышения быстродействия системы, в ней установлены второе по766 роговое устройство и второй блок выделения модуля, вход которого соединен с выходом тахогенератора, а выход через второе пороговое устройство подключен ко второму управляющему входу коммутатора. Источники информации, принятые во внимание при экспертизе JU Проектирование следящих систем под ред. Рабиновича Л. В., М., Машиностроение, 1969, с. 219-220. 2.Авторское свидетельство СССР N9 482716, кл. G 05 В 11/01, 05.01.76. 3.Авторское свидетельство СССР (по заявке № 2439991/18-24), кл. G05 В 11/01, 03.0L77. 4.Попов Е. П. Автоматическое регулирование и управление, М., Физматгиз, 1962, с. 349-351 (прототип).
