1
Изобретение относится к автоматике, а именно к электрическим устройствам,предотвращающим колебания на выходе систем автоматического управления.
Известна следящая система ,содержащая блок формирования максимального установившегося значения и блок деформации основного управляющего сигнала Cll ,
Недостатком известной системы является необеспечение достаточной точности при знакопеременном входном сигнале,
/Известна также следящая система с псевдолинейным корректирующим устройством, содержащая блок умножения, блок выделения модуля и блок определения знака функции, которые приме- няются для повышения качественных показателей систем автоматического управления 2 ,
Недостатком этого известного устройства также является недостаточная точность системы при знакопеременном входном воздействии.
Наиболее близкой к предлагаемой по технической сущности является следящая система, содержащая последовательно соединенные измеритель
рассогласования, /силитель-преобразователь, первый коммутатор,сумматор и исполнительный механизм, выход которого подключен к входу датчика скоростной обратной связи и к входу измерителя рассогласования, выход которого через первое корректирующее звено подключен к первому входу блока сравне10ния знаков, второй вход которого соединен с выходом усилителя-преобразователя, а выход соединен с управляющим входом первого коммутатора СЗ ,
15
Недостатком нзвестной сксте лы является наличие всплесков ошибки при знакопеременном входном сигнале, возникающих в моменты изменения
20 знака основного управляющего сигнала на входе коммутатора, что снижает точность системы. Это явление обусловлено тем, что при сигналах на входе коммутатора близких к нуЛю
25 эффективность воздействия нелинейного корректирующего устройства резко уменьшается.
Цель изобретения - повышение точности системы при знакопеременном
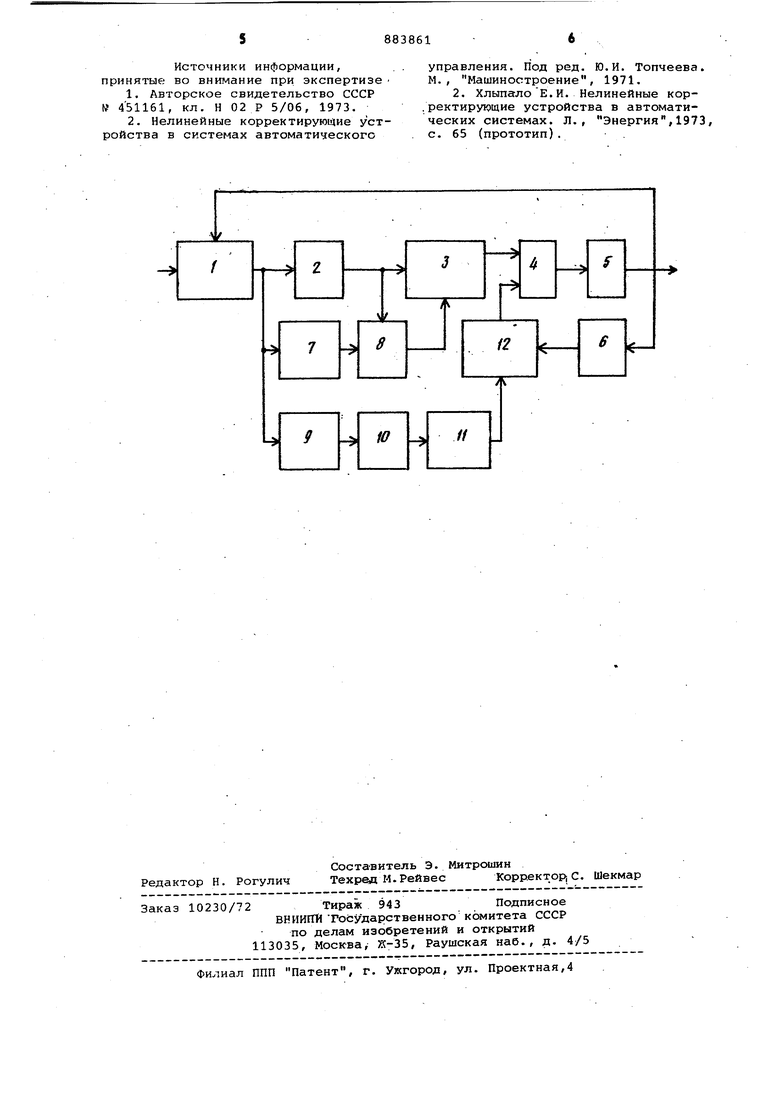
30 входном воздействии. Поставленная цель достигается тем что следящая система, содержащая последовательно соединенные измеритель рассогласования, усилительпреобразователь ,первый коммутатор, сумматор и исполнительный механизм, выход которого подключен ко входу датчика скоростной обратной связи и ко входу измерителя рассогласования, выход которого через первое корректирующее звено подключен к пер вому входу блока сравнения знаков, второй вход которого соединен с выхо дом усилителя-преобразователя, а выход соединен с соответствующим вхо дом первого коммутатора, дополнительно соедержит последовательно сое диненные второе корректирующее звено блок выделения модуля, пороговый элемент и второй коммутатор, выход которого соединен со вторым входом сумх- атора, а второй вход подключен к выходу датчика скоростной обратной связи, причем вход второго корректирукмдего звена соединен с выходом изм рителя рассогласования. На чертеже приведена структурная схема следящей системы. Система содержит последовательно соединенные измеритель 1 рассогласования , усилитель-преобразователь 2,первый коммутатор 3, сумматор 4, исполнительный механизм 5, а датчик 6 скоростной обратной связи и соединенные последовательно первое корректирующее звено 7 и блок 8 сравнения знаков. При этом выход бло ка В сравнения знаков подключен к управляющему входу первого коммутато ра 3 , а второй вход - к выходу усилителя-преобразователя 2. Первый вход измерителя 1 рассогласования является входом системы, второй вход связан с выходом исполнительного механизма 5 и входом датчика 6 скоростной обратной связи, а выход .соединен со входом первого корректи рующего звена 7. Следящая система дополнительно снабжена последовательно соединенным вторым корректирующим звеном 9,блок 10 выделения модуля, пороговым элементом 11. При этом выход пороговог элемента 11 подключен к управляющем входу второго коммутатора 1.2,, вход которого соединен с выходом датчика б скоростной обратной связи, а выход - со вторым входом сумматора 4. Система работает следующим образ Коррекция системы осуществляется нелинейным корректирующим устройством, состоящим из первого коммутато 3 и блока 8 сравнения знаков. При сигнале на выходе блока 10 выделени модуля, большем зоны нечувствительности порогоэого элемента 11, второ коммутатор 12 инвертирует сигнал с датчика б скоростной обратной связи, который затем поступает на втоой вход суммирующего усилителя 4, т.е. скоростная отрицательная обратная связь преобразуется гз положительную. Величина зоны нечувствительности порогового элемента 11 выбирается равной величине сигнала на выходе блока 10 вьвделения модуля при работе следящей системы с заанной ошибкой. Таким образом,когда ошибка системы превышает заданную, второй коммутатор 12 инвертирует рбратную связь и коэффициент передачи системы возрастает -KO в два раз, где KOJ - глубина скоростной обратной связи. В результате, ошибка системы быстро уменьшается и скоростная обратная связь вновь преобразуется в отрицательную. При оптимальных параметрах зоны нечувствительности порогового йлемента 11 и второго корректирующего звена 9 всплески ошибки практически исчезают. Положительный (технический) эффект от использования предлагаемой системы по сравнению с известной, заключается в повышении ее точности при знакопеременном входном воздействии. Например, для предлагаемой следящей системы с добротностью D 5000 /с при входном синусоидальном воздействии с амплитудой 3° и частотой 2 Гц динамическая ошибка уменьшится с 0,6 до 0,12°, т.е. в 5 раз. Формула изобретения Следящая система, содержащая последовательно соединенные измеритель рассогласования, усилитель-преобразователь, первый коммутатор,сумматор и исполнительный механизм,выход которого подключен ко входу датчика скоростной обратной связи и ко.входу измерителя рассогласования, выход которого через первое корректирующее звено подключен к первому входу блока сравнения знаков, второй вход которого соединен с -выходом усилителя-преобразователя,а выход соединен с управляющим входом первого коглмутатора, отличающ а я с я тем, что, с целью повышения динамической точности системы При .знакопеременном сигнале,она содержит последовательно соединенные второе корректирующее звено,блок выделения модуля, пороговый элемент и второй коммутатор, выход которого соединен со вторым входом сумматора, а второй вход подключен к выходу датчика скоростной обратной связи, причем вход второго корректирующего звена соединен с выходом измерителя рассогласования.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 451161, кл. Н 02 Р 5/06, 1973.
2.Нелинейные корректирующие устройства в системах автоматического
управления. Под ред. Ю.И. Топчеева. М., Машиностроение, 1971.
2. ХлыпалоЕ.И. Нелинейные кор. ректирукрщие устройства в автоматических системах. Л., Энергия,1973, с. 65 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1977 |
|
SU703776A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Двухканальная следящая система | 1974 |
|
SU487375A1 |
| Следящая система | 1975 |
|
SU545969A1 |
| Следящая система | 1990 |
|
SU1764030A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Система управления | 1976 |
|
SU714350A1 |
