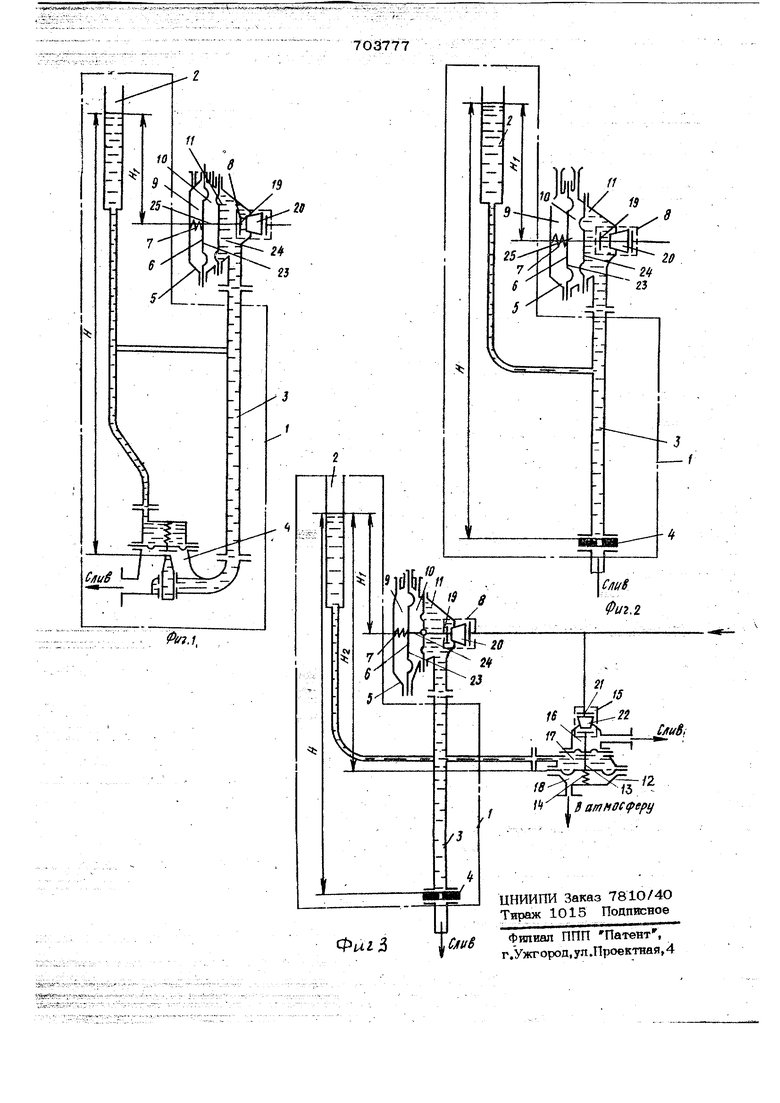
(54) ГИДРАВЛИЧЕСКИЙ ИЗОДРОМНЫЙ РЕГУЛЯТОР состоящий из емкости 2, соединенной трубопроводом 3 с узлом 4 регулировани слива, измеритель регулируемого параметра, выполненный в виде корпуса 5, раздёлёйнбго двухмембранным блоком 6 с пружиной 7, связанным с ре улирующим органом 8, натри камеры 9, 10, IJL Камеры 9, 10 соединены с датчиком регулируемого параметра (на чертеже не показан), а камера 11 соедине на с трубопроводом 3, и серфомотор (на чертеже не показан). Камера 11 че раз регулирующий орган 8 соединеий с сервомотором (на чертеже не показан). Регулятор на фиг. 2 о.тличаётся/тем, что в нем узел 4 регулирования слива выполнен в виде дросселя. Регулятор на фиг, 3 отличается тем, что в нем узел 4 регулирования слиЕ(а выполнен в виде дросселя и в нем установлен усилитель, выполненный в виде корпуса 12, разделенного двухмембранным блоком 13 с пружиной 14, связан- Шш С дросселирующим органом 15, на три камеры 16, 17, 18, камера 17 соеднЪен с трубопроводом 3, камера 1 боединена с атмосферой , а камера 16 Соединена со сливом и через дросселиру щий (регулирующий) орган 15 - с мотором (на чертеже не показан). На фиг. 1тЗ регулирующий орган 8 сострит из заслонки 19 и сопла 20. На фиг. 3 дросселирующий орган 15 состои из заслонки 21 и сопла 22. На фиг, 1-тЗ двухмембранный блок 6 состоит из мембран 23, 24, связанных штоком 25, Регулятор, показанный на фиг. 1, работйет следующим образом.. - В установившемся режиме, когда ре гулируемый параметр имеет заданное , значение, расход жидкости через регулирующий орган 8 имеет-некоторое постоянное значение, определ5пощее положение сервомотора. Изменение регулируемого параметра воздействует на двухмембранный блок В, происходит перемещение щтока 25 и заслонки 19, благо даря чему вводится пропорциональное воздействие. Одновременно нарущается Г баланс расходов в трубопроводе 3, вслед ствие чего приходит в движение уровень в емкости 2, воздействующий на мембрану 24 измерителя регулируемого параметра, что вызьшает дополнительное перемещение заслонки 19, а также заслонки устройства регулирования слива . до Тех , пока регулируемый параметр не примет прежнее значение. В этот момент благодаря соответствуюп1ёй настройке пружины устройства регулирования слива восстанавливается баланс расходов в трубопроводе 3 и состояние равновесия всей системы. В схеме на фиг. 1 жесткость пружины измерителя регулируемого параметра может колебаться в довольно широких пределах и наличие устройства по ее настройке не обязательно. Регулятор, показанный па фиг. 2, работает следующим обрайом. В установивщемся режиме, когда регулируемый параметр имеет заданное значение, расход жидкости через регулирующий орган 8 имеет некоторое постоянное значение, определяющее положение сервомотора. Изменение регулируемого параметра воздействует на двухмембранный ёлок 6, происходит перемещение штока 25 и заслонки 19, благодаря чему вводится пропорциональное воздействие. Одновременно нарушается баланс расходов в трубопроводе 3,-вследствие чего приходит в движение уровень в емкости 2, воздействующий на мембрану 24 измерителя регулируемого параметра, что вызывает дополнительное перемещение заслонки 19 до тех пор, пока регулируемый параметр не примет прежнее значение. В этот Момент благодаря соответствующей настройке пружины измерителя регулируемого параметра восстановится балйнс расходов в трубопроводе 3 и состояние равновесия всей системы. Регулятор, показанный на фиг. 3, работает следующим образом. В установившемся режиме, когда регулируемый параметр имеет заданное значение, расход жидкости через регулирующий орган 8, имеет некоторое постоянное значение, определяющее положение сервомотора. Изменение величины регулируемого параметра воздействует на двухмембранный блок 6, происходит перемещение щтока 25 и заслонки 19, благодаря чему вводится пропорциональное Воздействие. Одновременно карущается баланс расходов в трубопроводе 3, вследствие чего приходит в движе.ние уровень в емкости 2. Уровень в вою очередь в оздействует на мемёрану 24 измерителя регулируемого параметра и на двухмембранный блок 13 усилитея, что вызьшает дополнительное перемеение заслонки 19 до тех пор, -лока егулируемый параметр не примет ирежнее значение. В этот момент, благодаря соответствующей настройке пружины измерителя регулируемого параметра, восстановится баланс расходов в трубопроводе 3 и состояние равнсжесия всей сис темы. Технико-экономический эффект, достигаемый при применении изобретения, дос тигается исключением узлов из системы и связанным с этим повышением надёжности и улучшением качества йрйцёсСй регулирования. Вариант по фиг.З обеспечивает лучшую по сравнению с другими схемами комнонйвку регулятора и повышает стабильность настройки, не предъявляя серьезных тре&званий к характеристикам других узлов; в ариант по фиг.1 позволяет улучшить качество регулирсшания, а вариант по фиг.2 объединяет достоинс ва обоих предыдущих схем, но требует соблюдения условий, которые не всегда достижимы., Формула изобрете ни я 1. Гидравлический изодромный регулятор, содержащий формирователь интегрального воздействия, состоящий из емкости, соединеннЫ1 трубопроводом с узлом регулирования слива, измеритель регулируемого параметра, состоящий из корпуса, разделенного подпружиненным двухмембранным блоком, связанным с регулируюшим органом, на три камеры, две из которых соединены с датчиком регулируемого параметра, а третья - с трубопроводом, и сервомотор, отличающийся тем, что, с целью упрощения регулятс а, третья камера взмерителя регулируемого параметра соедиаеав через регулирующий орган с сервомотором. 2.Гидравлический изодромный регулятор по п. 1, о т п и ч а ю щ н и с я тем, что в нем уэея регулирования слива выполнен в виде дросселя. 3.Гидравлический изодромный регулятор по п. 2, отличающийся тем, что в нем установлен усилитётгь, состоящий из корпуса, разделенного подпружиненным двухмембранным блоком, связанным с дросселирующим органом, на три камеры, средняя из которых соединена с трубопроводом формирователя интегрального воздействия, одна из крайних - с атмосферой, а другая - со сливом и через дроссилирующнй орган - с сервомотором. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР NO 565288, кл.С 05 2i 7/ОЗ, 1974 (прототип).
7/х
г«
Т
C/ii(S Фиг.2
C/tuBi
/2
5 tarnMSCtfepy
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический изодромный регулятор | 1979 |
|
SU853607A1 |
| ИЗОДРОМНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НЕПРЯМОГО ДЕЙСТВИЯ | 1991 |
|
RU2010289C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НЕПРЯМОГО ДЕЙСТВИЯ | 1991 |
|
RU2010328C1 |
| СЕРВОМОТОРНАЯ СИСТЕМА ИЗОДРОМНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1992 |
|
RU2010290C1 |
| РЕГУЛЯТОР УРОВНЯ | 1972 |
|
SU434386A1 |
| Способ автоматической коррекции характеристик регулятора частоты электроэнергетического агрегата | 1981 |
|
SU1035769A1 |
| Регулятор скорости непрямого действия | 1982 |
|
SU1054560A1 |
| Система регулирования питательного турбонасоса | 1986 |
|
SU1379568A1 |
| Изодромный регулятор расхода газа | 1977 |
|
SU619906A1 |