(54) СПОСОБ АДАПТИВНОЙ КОРРЕКЦИИ ДВУХКАНАЛЬНОЙ
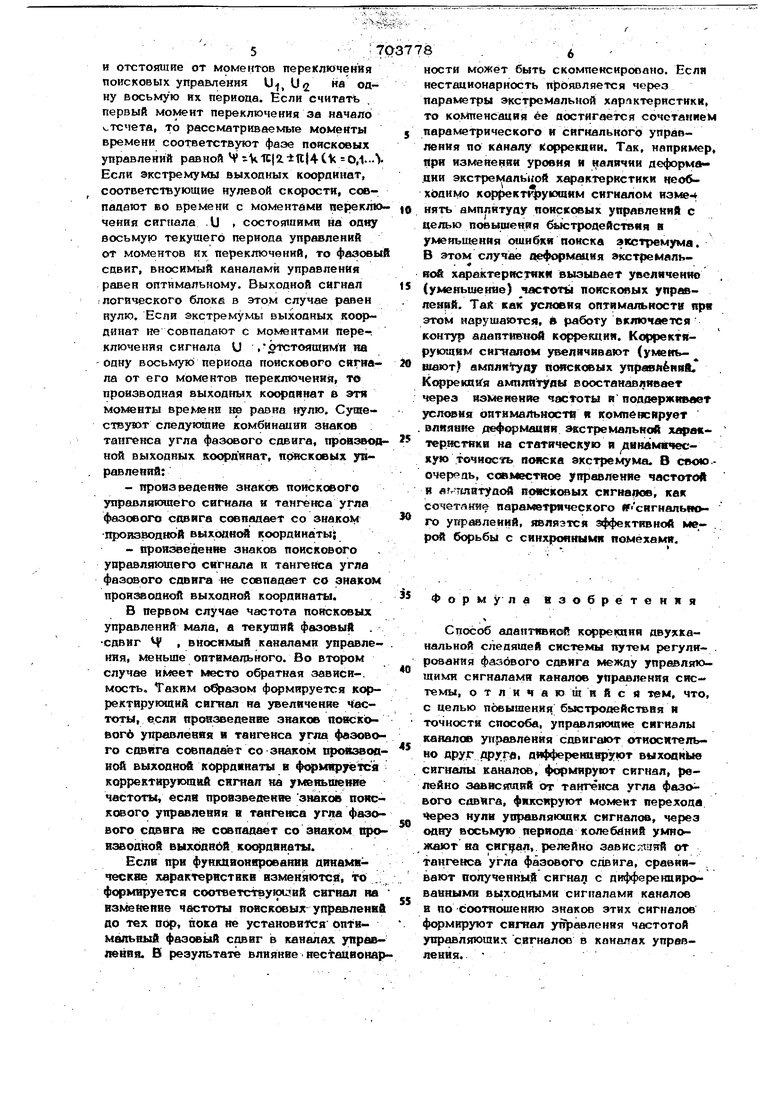
СЛЕДЯЩЕЙ СИСТЕМЫ Для способа-прототипа характерно следующее. 1. Наряду с нестационарностью Динамических свойств системы сущесте ную роль йля; гфоцессй слежения играет вестационарность экстре мальнЬЙ характе ристики объекта управления, компексанйя которой в способе-прототипе не предусмотрена. Так, например, реэко вы раженная нестационарность 9кст{ мапь1«Л характеристики поля излучения а эедаче самонаведения приводит к осЛёй);5 нию системы. I 2. В силу специфики метода скнхр ;ного детектирования, положенного Б.рс-«сву одределекия гвйдвента фукотв /: качег. гва, скособ-прототнп критичен к обье Там с локальными экстремумами в сйн хрокными вазмуиртнкями 3. На базе алгоритма способа- прото . типа затрудни,тельно попучекие дискре1 ных сигналов, пропорциснальных cJcop ocT дрейфа Экстремальной Характеристики. 4. Для способа-прототипа xapetcreptm ограничение в приборной реЁЛИзМин для многомерного и многоэкс трема ль аого оптимизаторп. ;% .. Цель настоящего изобретений ЬОстояла.в разработке такого способа йдаптйвной коррекции, который позоог.иет двухканальнрй следящей системе с управляемой частотой поискового сигнала з стродейстаие, яайеж гость и точность .Стоматического поиска и сопрсеождекггя sGhGKi i.pi нестациоиарпости его етеУЕчесгих и динамических характерзсtHK, а улучшить селекцию цели в группе целей (многоэг(стремальная , Я:зяача) я раширить функционвлЬные воэi,cssBocTR системы. - . .---...- . - iJ;,-.-. -. .,„„-.-.: --. согласно кзобр тейню постабленная цель постигается тем/ что управляющие дйгнйлы каналов управления одввгают . о Яосйтельно flpyf друга, дифференцяp--Rot эыход:г Ч сягвалы канало., формкfSyiOT сигнал, рзпейио Зависящей гёнса угла фазового сдвига, г омент .й;арехода через нуль ут равляюtiiHx сигиалда и. через одну восьмую периода колебаний умномсают ва сигнал, рёлейно заавстций от тангеяеа угла файового сдвига, сравнивают полученный 5Е«кал с Дифференцированными выходиммя а нйлами KaHanosVв зависимости «йг соотношения знаков этих сагналов. формщэукуг сигнал управления частотой 8 . управляизцих сигналов а каналах управления.., На чертеже представлека функыноиаль- ная схема двух канальной следящей сне- темы с адаптивным контуром коррекцив, илл 0стрнрующая один из ВОЗМОЖНЫЙ вариантов физической реализации предлагаемого способа. Она содержит управляемый по частоте генератор 1 поисковых койебаний, фазорасщепитель, состоящий из делителей частоты 2 и 3, линейные звенья 4, 5, интегрирующие звенья 6, 7, Модель объекта 8 управления, сумматор 9 и логические блоки 10 и И„ Объект 8 .управления и сумматор Q образуют главную параметрическую связь, а логические 10 и 1JL, а также сумматор 9 образуют адативные корректирующие Ьвяэи. Реализация предлагаемого спосолр . .. . .. - .-W / ба приведённой схемой заключается в том, что сигнал U с выхода генератора 1 подают на делители частоты 2. я 3, На выходах делителей частоты 2, Формируют сигналы поисковых уцравлеинй U,,U5: , сдвинутых по фа)эе на Kli оТнскИтельнодруг друга. В свою очередь, поисковые управления U-ttUg мируют на выходе интегрирующих звеньев 6, 7 клкалов сканирующие движения Эти движения позволяют получить текущую инфс маяию о состояннн обьекта управления. Заметим, что один полупериод сигнала ta выходегенератора 1 ссютветствует восьмой текущего пэриода ПОНСКО9Ы; управлений . Поэтому сигналы У ,U:t, Ja подаюТ ск йй входы логических блоков 10 а 11 од ковре менио с выходными сигналами .1й1 ейиых звеньев 4 и Б. Задачей адаптивной коррекиии является таксе управлеаие частотой поисковых сигналов, чтобы текущий фазовый сдвйг v, вносимый цаналами увравлеиин, поддерживался равЕЕЫм величаве 4 k1t}2 ±1tIk о,1--. Occ efraocTbSo данного способа даляется то, что взк вение частоты кояёбаниД в cacTeiwie возможно как частотой гейератс (параметрическое ртравлеине), так и управлением ахтпитудой поисковых-сигналов (сигнальное Згправяеняе), В этой связи для управле-. ния частотой и (или) амплитудой используется знак отклонения текущего фазового сдвига от величины M sHlC.lii (IcsOH-) формирования «того, знака рассмотрим моменты времени, .связанные с переключением сигнала У и отстояише от моментов переключения поисковых управления U, U2 а одну восьмую их периоаа. Если считать первый момент переключения за начало ч-тсмета, то рассматриваемые моменты времени соответствуют фазе поисковых управлений равной Ц iVlC|2.i1t|4Cl О,1.-Л Если экстремумы выходных коораннат, соответствующие нулевой , совпадают во времени с моментами переклю чения сигнала .U , состоящими на одну восьмую текущего периода управлений от моментов их переключений, то фaiЗoвы сдвиг, вносимый каналами управления равен оптимальному. Выходной сигнал логического блока в этом случае равен нулю, ЕСЛИ экстрем мы выходных координат не совпадают с моментами переключения сигнала U .отстояшими на -одну восьмуто периода поискового сигнала от его моментов переключения, те производная выходных коороинат в эти моменты ке равна нулю. Существуют следующие комбииаинги знаков тангенса угла фазсюого совига, провэвоо ной выходных коордяпат, поисковых управлений:-произведение знаков поискового управляющего сигнала н тангенса угла фазового С1№ига совпадает со знаком пр0|пзводной выходной координаты; -произвеаенне знаков поискового управл{1Ю1шего сигнала и тангенса угла фазового сдвига ие совпадает со знаком производной выходной координаты. В первом случае частота поисковых управлений мала, а текуший фазсюый . сдвиг , вносимый каналами управлення, меньше оптимального. Во втором случае кмеег место обратная зависи-. мость. Таким образом формируется корректирукнций сигнал на увеличение частоты, если провзведеаие знаков повсковогб управлевия в тангенса угла фазово го совяга совпадает со знаком провзвоа вой выхоанод коррдвнаты в ф М1ф ге1гся корректирующий снгиал на умввьшеняе частоты, еслв провзведенве знаков покскового управления в таигеиса угла фазо вого сдввга не совпааает со знаком про нзводной выхоонбй косфдвиаты. Еслв прв функивонвроваянв дивамвческве карактервствкв взменяются, то . формируется соответствукхлий снгнал на взмеаевне частоты поисковых-управленв до тех пор, пока не установится оптвмальвый фазовый сдвиг в каналах упрев- ленвя. В результате влияние нестаивона 7 8.6 ности может быть скомпенсировано, нестационарность проявляется через параметры экстремальной характеристики, то компенсация ее достигается сочетанием параметрического и сигнального управления по каналу коррекпии. Так, например, прв изменении уровня в наличии деформа дни экстремальной характеристики цеобхЬдимо ко№ектк)ующим сигналом изме-4 нять амплитуду поисковых управлений с целью повышения быстродействяя в уменьшения сшибкя поиска экстремума. В этом случ:ве оеформация экстремальков. характерястнкК вызывает увслвченио (уменьшение) частоты поисковых управлеяий. Tait как условия оптимальноств прв этом нарушаются, в работу включается контур ааапт( коррекция. Корректирующем сигналом увеличивают (умеиьшают) амплнгуау поисковых управй няА. Кс рекп«Гя амплятуоы воостанавлввает через нэмененке частоты R поддерживает оятнмаЛьноств я комп всврует влияние деформации экстремальной харастержтикв на статическую в двнамнческую точноскь пояска экстремума. В свою.очеродь, совместное управление частотой и вгутхлйтудой прясковых свгнафов, как сочетание параАютряческого 1Гсвгналык го упршлеиий, являэтся аН ективной ме- . рой борьбы с синхронными помехами. в 3 о б р е т е н я я О р м у л а Способ адаптивной коррекция двухканальной следящей системы путем регули- . рования фазового сдвВга между управляющими сигналами каналов управления системы, отличающийся тем, что, с целью повышения быстрооейст&вя в точности способа, управляющие сигналы каналов управления сдвигают относительно друг другй дифференцируют выхоан1ие сигналы каналов, формируют сигнал, релейно заввсжпкй от тангенса угла фазо вого сдвига, фвкоируют момент перехода Через нули управляющих сигналов, через одну восьмую периода колебс ний умножают на ,. релейно завис tasrtt от тангенса угла фазсвого сдвига, сравни- , вают полученный сигнал; с дифференцированными выходными сигналами каналов в по соотношению знаков этих сигналов формируют свгнал управления частотой управляющих сигналов в каналах управления.
4s,s5fe 3 1703778
вмфоркшавн, прянятЬб ёоШимание при ekcnei TBde
1.Крвсовекйй А. А. Динамике neitpstMUBHUx свмбн траиввкхпвхся систем, М„ Фиэматгиэ, 1963,
2.Обабйов В. К., Чижевский В. Г, Построено 8кстремапьт пс систем с
|ЗШ.
8
с} « хро1вп1о-фв $}В{ м автвкттфоваваем. Ав-кшатгска в телвмехапяка. 10, 1977. V
3. Авто|зское свидетельство СССР № 228109, кя. О05 В 13/О2, 1968 (прототип),,
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| Двухканальная система экстремального регулирования | 1984 |
|
SU1173392A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Идентификатор многомерных объектов | 1984 |
|
SU1215086A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Радиоимпульсный фазометр | 1984 |
|
SU1226330A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| Двухканальный экстремальный регулятор | 1987 |
|
SU1444713A1 |
