(54) ИНСТРУМЕНТ ДЛЯ ЧИСТОВОЙ И УПРОЧНЯЮЩЕЙ , ОБРАБОТКИ ДЕТАЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНСТРУМЕНТ ДЛЯ УПРОЧНЯЮЩЕЙ ОБРАБОТКИ | 2000 |
|
RU2173628C1 |
| Устройство для алмазного выглаживания поверхностей деталей | 1980 |
|
SU933411A1 |
| Инструмент для накатывания наружных поверхностей вращения | 1988 |
|
SU1581569A1 |
| СПОСОБ ОБРАБОТКИ НЕПОЛНЫХ СФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ ПОВЕРХНОСТНЫМ ДЕФОРМИРОВАНИЕМ | 1992 |
|
RU2031770C1 |
| УСТРОЙСТВО ДЛЯ УПРОЧНЕНИЯ РЕЗЬБЫ | 2007 |
|
RU2347660C1 |
| СПОСОБ ОБРАБОТКИ ПОВЕРХНОСТИ ТРЕНИЯ | 2004 |
|
RU2269407C2 |
| Устройство для чистовой упрочняющей обработки поверхностей вращения | 1985 |
|
SU1696285A1 |
| Устройство для виброобкатывания | 1990 |
|
SU1731609A1 |
| СПОСОБ УПРОЧНЕНИЯ КРУПНЫХ РЕЗЬБ | 2007 |
|
RU2355552C1 |
| МНОГОРЯДНОЕ УСТРОЙСТВО ДЛЯ СТАТИКО-ИМПУЛЬСНОГО ОБКАТЫВАНИЯ | 2007 |
|
RU2347667C1 |
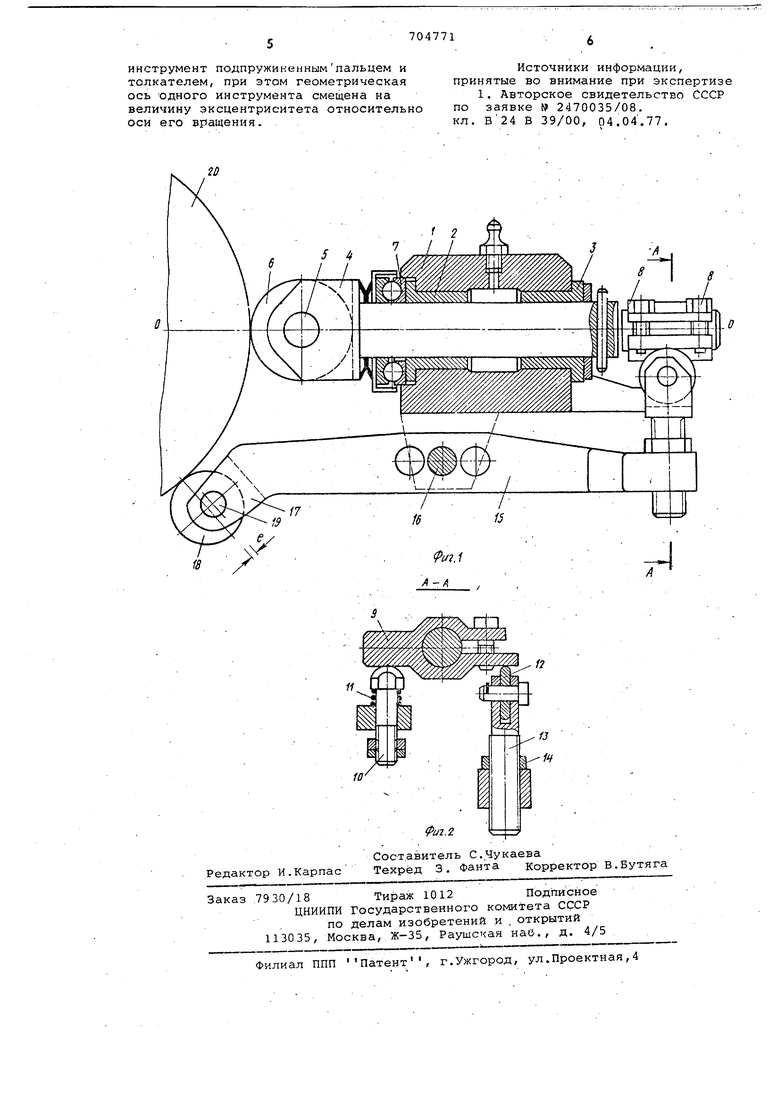
, Изобретение относится к области металлообработки, в частности к обработке металлов поверхностным плас тическим деформированием, и может быть использовано для чистовой и упрочняющей обработки поверхностей деталей машин. Известны инстр ументы для ЧйсТОвой обработки деталей, содержащие два инструментодержателя, установленных на двуплечем рычаге с предусмотренг ной между ними кинематической сЬязью обеспечивающей поворот одного инстру мента относительно другого 1. В таких инструментах кинематическая связь, обеспечивающая одновремен но динамическое упрочнение детали в направлении, нормальном к последней увеличивает радиальные усилия. Что ведет . к понижению точности обрабатываемых деталей. Целью изобретения является повышение производительности обработки. Поставленная цель достигается тем, что кинематическая связь выполнена в виде хомута с двумя платиками, предназначенными для контакта с введенными в инструмент подпружиненн пальцем, и толкателем, установленным с возможностью вращения, при этом геометрическая ось одного инструмента смещена на величину эксцентриситета относительно оси его вращения. На фиг. 1 показан инструмент в продольном разрезе; на фиг. 2 - разрез А-А на фиг. 1. В отверстии корпуса 1 инструмента закреплены втулки 2 и 3 скольжения, предназначенные для восприятия радиальных нагрузок от цилиндрического хвостовика инструментодержателя 4, в котором с возможностью свободного вращения .вокруг оси 5 установлен деформирующий ролик 6. Осевая нагрузка от последнего воспринимается упорным шарикоподшипником 7.Между головкой держателя 4 и упорным шарикоподшипником 7 установлены тарельчатые пружины, определяющие рабочее усилие накатывания. На конце хвостовика держателя болтами 8 закреплен хомут 9 с двумя платиками, оппозитно расположенными относительно оси держателя. Посредством указанных платиков хомут 9 взаимодействует с одной стороны с пальцем 10, поджимаемым к платику пружиной 11, ас другой - с роликом 12, установленным с возможностью вращения в пальце 13, закрепленном гайкой 14 на конце рычага 15.Последний установлен с возможностью качания на оси 16, жестко закрепленной в корпусе 1. Противоположное плечо рычага 15 содержит держатель 17 с деформирующим роликом 18, геометрическая ось которого смещена на величину эксцентриситета 2 относительно оси его вращения 19. Инструмент работает следующим образом. При обработке от воздействия обрабатываемой поверхности 20 получают вращение вокруг своих осей деформиоующие ролики 6 и 18. Вследствие несовпадения геометрической оси ролика 18 .с осью его вращения рычаг 15 в процессе обработки качается относительно оси 16. В результате второе плечо рычага 15 с закрепленным на нем пальцем 13 и опорным роликом 12 сообщает хомуту 9 и соответствен- но держателю4 с деформирующим роликом б поворотно-колебательное движение вокруг оси О-О . Подпружиненный относительно корпуса 1 палец 10 обеспечивает постоянный прижим платина хомута 9 .к опорному ролику 12 рычага 15. Для регулировки вылета рычага 15 при изменении диаметра обрабатываемо.й поверхности 20. в нем предусмотрены дополнительные отверстия.Угол поворота ролика относительно оси 16 регулируется путем изменения величины 6 эксцентриситета ролика 18, а частота поворотно-колебатель ного движения - путем изменения его диаметра. В результате сообщения ролику б дополнительного поворотно-колебател ного движения вокруг оси 0-0 в очаг деформации возникают касательные на пряжения, облегчающие процесс пластического деформирования и снижающ радиальное усилие накатывания. Кроме того, поворотно-колебательное . движение обеспечивает непрерывное изменение направления действия каса тельных напряжений в каждой точке обрабатываемого материала, т.е. на правление выглаживающего действия ролика в процессе обработки изменяетсй. Вследствие этого деформация металла происходит более равномерно повыыается степень его упрочнения, ликвидируется анизотропия физикомеханических свойств упрочненной поверхности, которая, как извёртно, характерна для накатывания. Предлагаемое усложнение траектории движения каждой точки деформующего ролика относительно обрабатываемой поверхности приводит к тому, что каждый ее участок ра каты вается,выглаживается в различных направлениях, причем изменение направления происходит при обра ботке непрерывно. Вследствие непрерывного изменения вектора движения деформирующей поверхности ролика относительно каждого участка обрабатываемой поверхности на последней создается сетка от пересекающихся следов ролика, регулируемый микрорельеф, что наряду с повышенной степенью упрочнения обрабатываемого материала улучшает эксплуатационные характеристики деталей (износостойкость, усталостную и контактную прочность, прочность прессовых посадок и и.д.). Дополнительное выглаживающее действие ролика с .непрерывно меняющимся направлением существенно повышает кратность приложения нагрузки на каждый участок обрабатываемой поверхности, что позволяет по сравнению с известными способами повысить допустимую подачу, а следователь-, но, производительность процесса. Деформирующий ролик 18 осуществляет накатывание с переменной нагрузкой, поскольку на постоянное усилие накатывания, определяемое величиной натяга между роликом и.обрабатываемой поверхностью, накладывается пульсирующая нагрузка, требуемая для преодоления усилия пружины 11 и момента для поворота держателя 4 с роликом б относительно оси. В результате на обработанной поверхности образуется закономерная система масляных карманов, имеющих различную глубину, профиль, поверхностную твердость. Величина пульсирующей нагрузки регулируется с помощью пружины 1.1. Предложенный роликовый инструмент способствует повышению точности обрабатываемых поверхностей .и их качестаенных характеристик (микрогеометрии, степени упрочнения, регулярности микрорельефа и т.д.), а- также снижению радиального усилия накатывания и образованию на обработанных поверхностях масляных карманов. Это Позволяет повысить производительность, а также получать обработанные поверхности с заранее заданными зксплуатационныг и характеристиками. Формула изобретения Инструмент для чистовой и упрочняющей обработки деталей, содержащий два инструментодержателя, установленных на двуплечем рычаге, с предусмотренной между ними кинемати.ческой связью, обеспечивающей поворот одного инструмента относительно другого, отличающийся тем, что, с целью повьш1ения производительности, кинематическая связь выполнена в виде хомута с двумя платиками, предназначенными для контакта с введенными в
