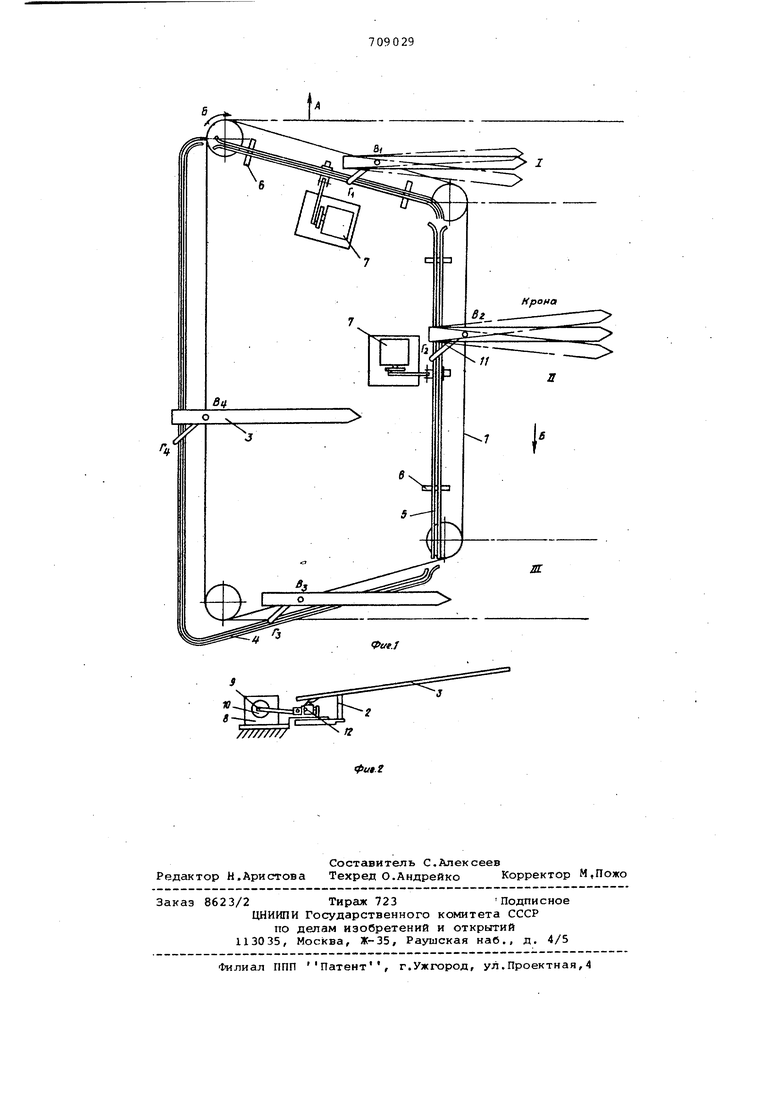
(54) УЛАВЛИВАТЕЛЬ К ПЛОДОУБОРОЧНЫМ МАШИНАМ имеет хвостовик 11. Один конец его жестко закреплен на лотке,, на другом имеется ролик 12, который установлен в направляющей дорожке. Ролик смещен относительно продольной оси лотка, ввиду чего при возвратно-поступатель ном движении дорожки 5 хселоба 3 Совершают колебательные движения. Расстояние между желобами выбрано из условия прохода между ними ветвей кроны и исключения проскакивания пло дов. Верхняя часть желобов покрыта мягким материалом. Улавливатель работает следунвдим образом. Агрегат движется по междурядью . сада по стрелке А (см.фиг. 1), а дви жение тягового элемента 1 происходит по стрелке &. Тяговой элемент 1 перемещает стойки 2 вместе с желобами 3, При этом хвостовик, перемещаясь по направляющей 4, 5, ориентирует лоток в определенном положении. Точки В и Г присоединения стойки 2 к тяговому элементу 1 и хвостовик 11 желоба к направляющей дорожке 4, 5 соответственно последовательно зан мают положения В , Г ; В f Т t где ж лобам передается колебательное движе ние. Вращение вала гидромотора чере эксцентрик и шатун преобразуется в возвратно-поступательное движение каправляющей дорожки, которая , перемещая вместе с собой хвостовики лот ков, передает последним колебания. В положении Bj , Tj ; 84 , Г желоба движутся без колебаний, выходя из кроны. На любом участке контура они всегда направлены в сторону кроны. В зоне I колеблющиеся желоба поступательно (без окружной скорости) внедряются в крону и улавливают плоды в зоне II. В зоне III они выходят из кроны. Ввиду разного направления движения агрегатов и желобов в рабочей зоне скорость последних в кроне относительно ветвей равна нулю. При стряхивании плоды попадают на желоба и скатываются по ним за пределы кроны Это исключает соударение плодов с ветвями, а следовательно, повыщ ается качество продукции. Колебание лотков в зонах внедрения I и в рабочей II облегчает внедрение их в крону, что повышает полноту съема и улавливания плодов. Формула изобретения Улавливатель к плодоуборочным машинам по авт. св.. 452311, о т л ичающийся тем, что, с целью увеличения полноты сбора плодов, желоба снабженыхвостовиками с роликами и направляющими дорожками, в кото 5ых установлены ролики, при этом направляющие в зоне внедрения желобов и в рабочей зоне снабжены кривошипно-шатунным механизмом привода.
/////////
| название | год | авторы | номер документа |
|---|---|---|---|
| Улавливатель плодов | 1973 |
|
SU452311A1 |
| ВСТРЯХИВАТЕЛЬ ПЛОДОУБОРОЧНОЙ МАШИНЫ | 1972 |
|
SU332809A1 |
| Плодоуборочная машина | 1981 |
|
SU982575A1 |
| Плодоуборочная машина | 1987 |
|
SU1417823A1 |
| ПЛОДОУБОРОЧНАЯ МАШИНА | 1998 |
|
RU2161397C2 |
| СТРЯХИВАТЕЛЬ ПЛОДОУБОРОЧНОГО КОМБАЙНА | 1997 |
|
RU2116021C1 |
| СТРЯХИВАТЕЛЬ ПЛОДОВ | 1993 |
|
RU2081550C1 |
| Плодоуборочная машина | 1987 |
|
SU1521351A1 |
| ПОДБОРЩИК ПЛОДОВ | 2006 |
|
RU2304870C1 |
| Способ сбора ягод | 1982 |
|
SU1115674A1 |