Изобретение относится к. подъемнотранспортной технике, а именно, к ручным тележкам с гидравлическим подъемным устройством и может быть применено во всех отраслях народного хозяйстввз где необходим подъем и перемещение грузов.
Известны конструкции ручных тележек с подъемными устройствами, на которых рукоять управления воздействует только на гидравлический насос и служит средством для перемещения тележки, но не управляет разнесенными для устойчивости поворотными колесами рояльного типа l.
Известна также грузоподъемная тележка, содержащая раму с поворотными к #лесамир грузоподъемный орган, соединенный со штоком силового цилиндра, и приводимый рокоятью управления плунжерный насос 2.
Управле ие .движением тележки осуществляется за счет того, что колеса выполнены поворотными. Однако возможны
неуправляемые боковы.е перемещения тележки на величину эксцентриситетаэ а прк езде поперек уклона появляется увод тележки в сторону уклона. Маневрирование и управление тележкой, где средством для перемещения является рукоять управления, не взаимодействующая Q поворотнъгми колесами, усложнено, а в уелоBEHJt насыщенности оборудованием в цгхах и на складах в ряде случаев вево можно.
Цели изобретения - повъщ1ение маневренности и ynpomeKvie управления.
Для этого тележка снабжена поворотным в горизонтальной плоскости кронштейном, установленнъгм на корпусе плунжерного насоса соосно плунжеруи имеющим проушины для шарнирного крепления рукояти управленняг и тягами, одни концы которых; mapHFipHO закреплены на упомянутом кронштейне, а другие посредством рычагов связаны, с осями поворота колес.
KfiOMo того, с целью увеличения ско(юсти подъема порожного грузоподъемного органа и облегчения подъема г-руза снабжена дополнительным плунжером, устаноЕленным вт1утри плунжера yKaaaHFioro насоса и подпружиненным относительно корпуса последнего. С целью обеспечения возможности поворо- -fe колес на различные углы при повороте рукояти управления на определенный угол, в кронштейне выполнен радиальный паз для перемещения в нем шарнирного соединения упомянутых тяг, а тяги -выполнены регулируемыми по длине.
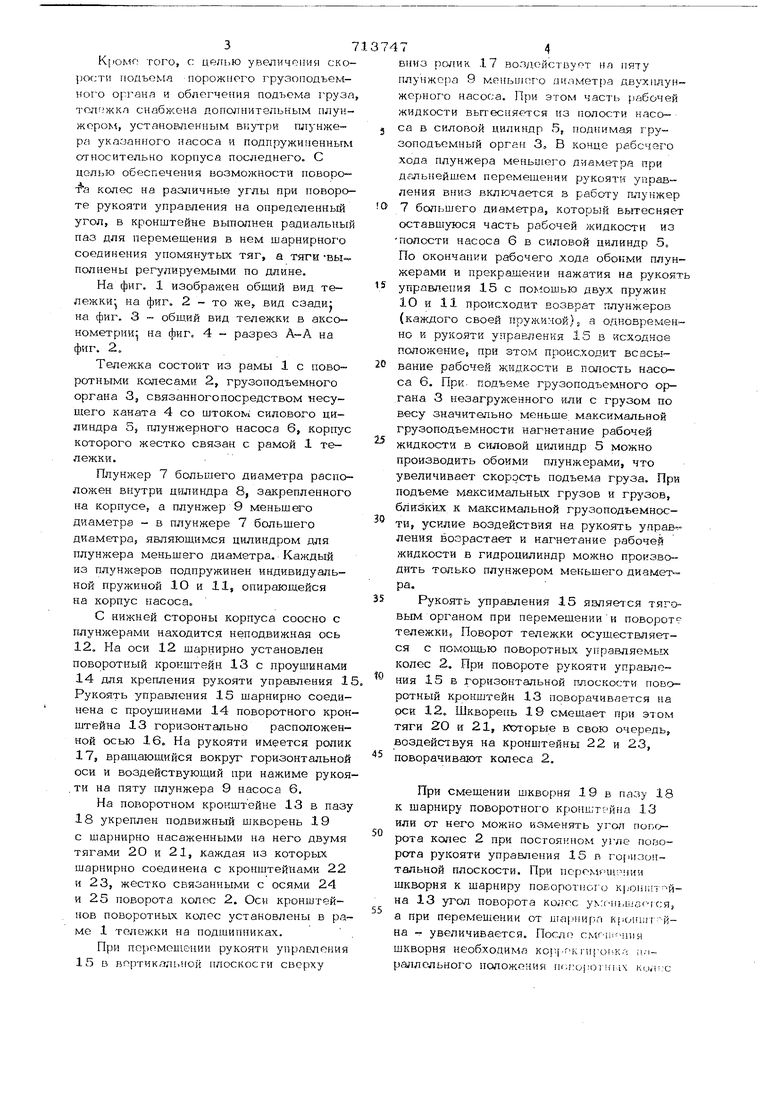
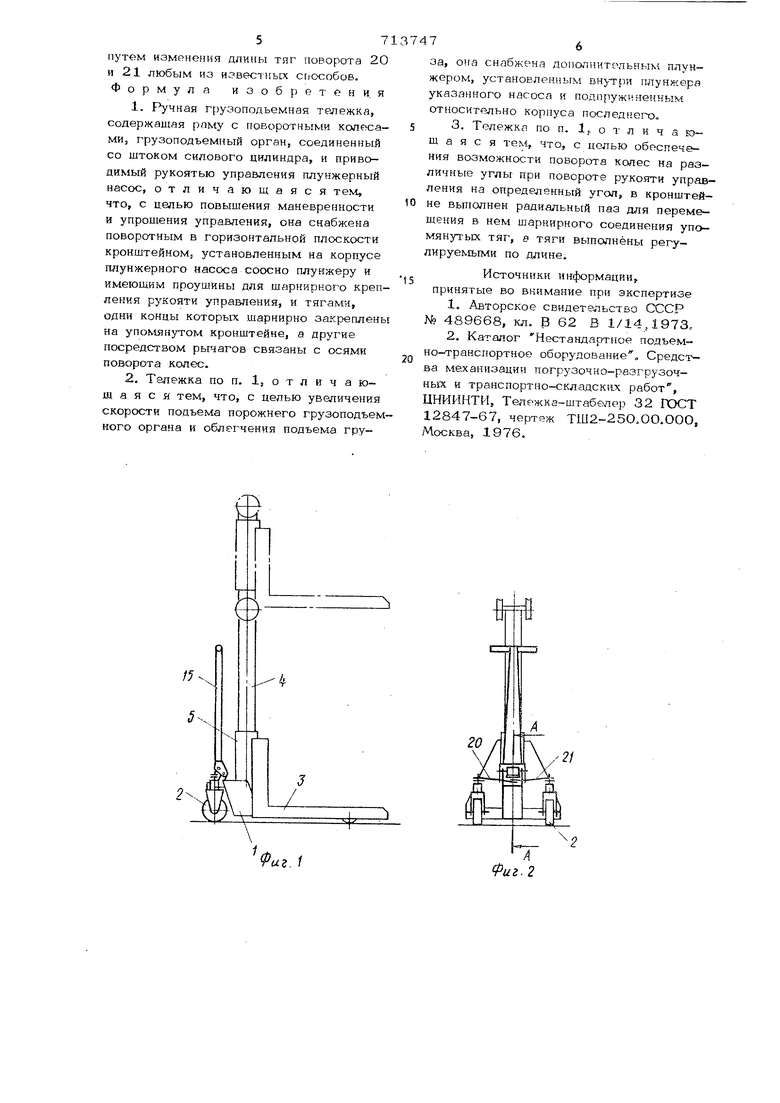
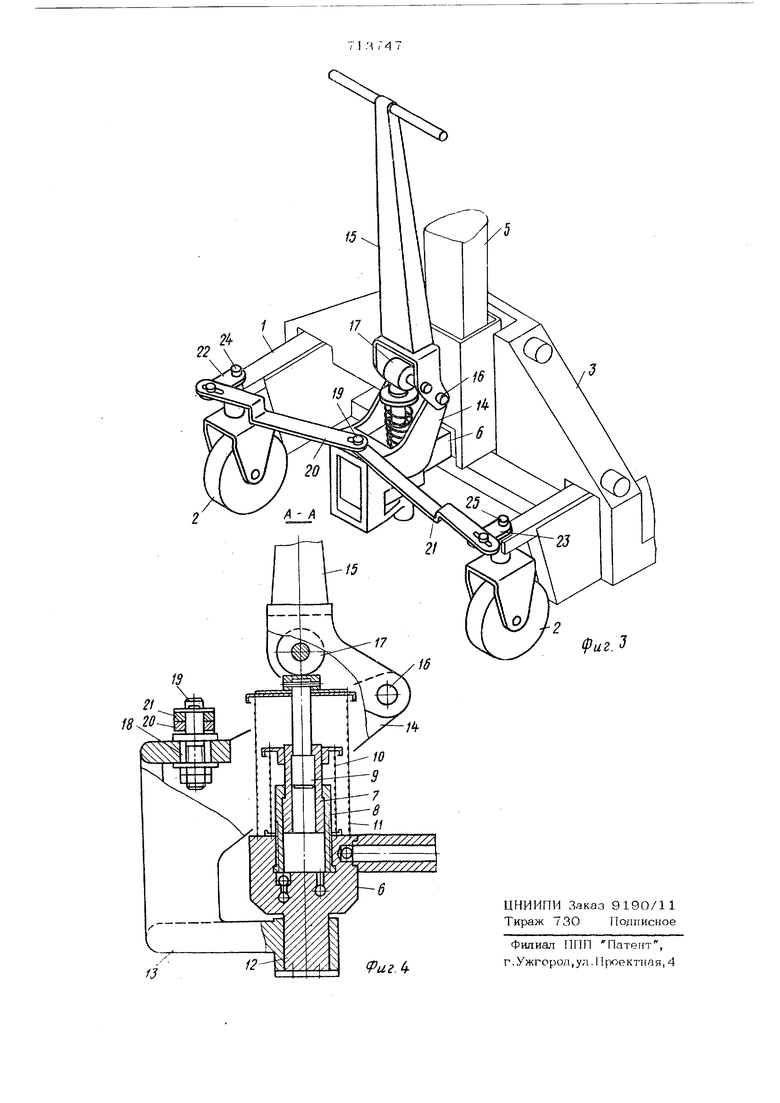
На фиг. 1 изображен общий вид те- лежки на фиг. 2 - то же, вид сзади на фиг. 3 общий вид тележки в аксонометрии: на фиг. 4 - разрез А-А на фиг. 2.
Тележка состоит из рамы 1 с поворотными колесами 2, грузоподъемного органа 3, связанногопосредством несущего каната 4 со штоком силового цилиндра 5, плунжерного насоса 6, корпус которого жестко связан с рамой 1 тележки.
Плунжер 7 большего диаметра расположен внутри д шиндра 8, закрепленного на корпусе, а плунжер 9 меньшего диаметра - в плунжере 7 большего диаметра, являющимся цилиндром для плунжера меньшего диаметра. Каждый из плунжеров подпружинен индивидуальной пружиной Ю и 11, опирающейся на корпус насоса.
С нижней стороны корпуса соосно с плунжерами находится неподвижная ось 12, На оси 12 шаргшрно установлен поворотный кронштейн 13 с проушинами 14 для крепления рукояти управления 1 Рукоять управления 15 шарнирно соединена с проущинами 14 поворотного кронштейна 13 горизонтально расположенной осью 16« На рукояти имеется ролик 17, вращающийся вокруг горизонтальной оси и воздействующий при нажиме рукоя, ти на пяту плунжера 9 насоса 6.
На поворотном кронштейне 13 в пазу 18 укреплен подвижный шкворень 19 с шарнирно насаженными на него двумя тягами 20 и 21, каждая из которых шарнирно соединена с кронщтейнами 22 и 23, жестко связанными с осями 24 и 25 поворота колос 2. Оси крон1итейнов поворотных Колес установлены в раме 1 тележки на подшипниках. При порпмощеиии рукояти управления 15 в вортикальной плоскости сверху
вниз ролик 17 воздействует на пяту плунжера 9 меньикя-о диамет)а дву.хплунжерного насоса. При этом часть рабочей жидкости вытесняется из полости насоса в силовой цилиндр 5, поднимая грузоподъемный орган 3, В конце рабочего хода плунжера меньшего диаметра при дальнейшем перемещении рукояти управления вниз включается в работу плунжер
7 большего диаметра, который вытесняет оставшуюся часть рабочей жидкости из ПОЛОСТИ насоса 6 в силовой цилиндр 5, По окончании рабочего хода обоими плунжерами и прекршлении нажатия на рукоять
управления 15 с помошью двух пружин Ю и 11 происходит возврат плунжеров (каждого своей пружиной), а одновременно и рукояти управления IS в исходное положение, при этом происходит всась5вание рабочей жидкости в полость насоса 6. Прк подъеме грузоподъемного органа 3 незагруженного или с грузом по весу значительно меньше максимальной грузоподъемности нагнетание рабочей
жидкости в силовой цилиндр 5 можно производить обоими плунжерами, что увеличивает скорость подъема груза. При подъеме максимальных грузов и грузов, близких к максимальной грузоподъемности, усилие воздействия на рукоять управ
ления возрастает и нагнетание рабочей жидкости в гидроцилиндр можно производить только плунжером меньшего диаметра,
Рукоять управления 15 является тяговым органом при перемещениии поворот тележки, Поворот тележки осуществляется с помощью поворотных управляемых колес 2. При повороте рукояти управления 15 в горизонтальной плоскости поворотный кронштейн 13 поворачивается на ОСЕ 12. Шкворень 19 смещает при этом тяги 2О и 21, которые в свою очередь, воздействуя на кронштейны 22 и 23,
поворачивают колеса 2.
При смещении шкворня 19 в пазу 18 к шарниру поворотного кронштейна 13 или от него можно изменять угол попорота колес 2 при постоянном угле поворота рукояти управления 15 в горизонтальной плоскости. При ncpONU llU- JHH
шкворня к шарниру поворотного крюнип йна 13 угол поворота колос укгсньи сстсяг а при перемещении от iiiaiJUHpn Rна - увеличивается. Поело cMriiiMin.q шкворня необходима KciH-ivnirotiK,-; п
раЛЛОЛЬНОГО положения IIi;i:Op01 HI.LK KiJii- с 57 путем изменеиня длины тяг поворота 20 и 21 любым из известиьге crjocoGoe. Формула изобр)етения 1.Ручная грузоподъемная тележка, содержащая раму с поворотными колесами, грузоподъемный орган, соединенный со штоком силового цилиндра, н приводимый рукоятью управления плунжерный насос, отличающаяся тем, что, с целью повыщения маневренности и упрощения управления, она снабжена поворотным в горизонтальной плоскости кронштейном, установленным на корпусе плунжерного насоса соосно плунжеру и имеющим проушины для шарнирного креп ления рукояти управления, и тягами, один концы которых шарнирно закреплены на упомянутом кронщтейне, а другие посредством рычагов связаны с осями поворота колес. 2.Тележка по п. 1, о т л и ч а ющ а я с я тем, что, с целью увеличения скорости подъема порожнего грузоподъем ного органа и облегчения подъема гру76за, она снабжена дополиитольным плунжером, установленным плунмлера указанного насоса я подпружиненным относительно корпуса последнего. 3. Тележка по п. If о т л и ч а юш а я с я тем, что, с целью обеспечения возможности поворота колес на различные углы при повороте рукояти управления на определенный угол, в кронщтейне выполнен радиальный паз для перемещения в нем шарнирного соединения упомянутъпх тяг, 8 тяги выполнены регулируемыми по длине. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 489668, кл. В 62 В 1/14 Д 973. 2,Каталог НестандартЕюе подъемно-транспортное оборудование. Средства механизации погрузочно-разгрузочных и транспортпо-склацсках работ, ЦНИИНТИ, Тележка-штабелер 32 ГОСТ 12847-67, чертеж ТШ2-25О.ОО.ООО, Москва, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 2005 |
|
RU2296042C2 |
| РУЧНАЯ ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА | 1992 |
|
RU2015051C1 |
| Ручная грузоподъемная тележка для транспортировки ящиков | 1978 |
|
SU765077A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Стопорное устройство тележки с самоустанавливающимися колесами | 1976 |
|
SU698822A1 |
| Погрузчик | 1989 |
|
SU1687571A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
(Раг. 1
20
