(54) ШАГАЮЩАЯ МАШИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвеска опорных катков гусеничной машины | 1980 |
|
SU901139A1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| Поворотное устройство шагающей машины | 1979 |
|
SU856890A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| ШАГАЮЩАЯ МАШИНА | 1995 |
|
RU2099230C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2495780C1 |
| БАЛАНСИРНАЯ ПОДВЕСКА | 2008 |
|
RU2385236C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
I
Изобретение относится к транспортным средствам, оснащенным движителями шагающего типа.
Известна многоопорная шагающая машина, содержащая корпус с расположен- ными на его бортах опорными стойками, каждая из которых посредством привода вертикального перемещения смонтирована на горизонтальных направляющих с возможностью возвратно-поступательного перемещения от силового привода XI
Движение транспортного средства осуществляется путем попеременного переноса корпуса по половине направляю- щих стоек, опущенных на грунт, и rfepeноса вперед поднятых над грунтом стоек другой половины относительно корпуса.
Недостатком этой машины является отсутствие средств поворота.
Наиболее близкой к данному изобретению по технической сущности и достигаемому результату является другая известная шагающая многоопорная машина, содержащая корпус с попарно расположен2
ными на его бортах опорными стойками, каждая из которых посредством привода вертикального перемещения подвижно ус- таноБлена в каретке, смонтированной в горизонтальной направляющей с возможностью возвратно-поступательного перемещения от силового привода, и механизмы поворота горизонтальных направляющих вокруг вертикальной оси, соединенные с рулевым управлением С2.
Последняя машина имеет средства поворота, однако криволинейное движение такого экипажа возможно только в том случае, когда на земле стоят три стойки из числа расположенных в углах корпуса. Остальные должны быть при этом подняты. Если на землю опираются одновременно четыре стойки, поворот машины может быть осуществлен только при точном выпоитнении необходимых соотношений между скоростями стоек правого и левого бортов корпуса, а также между положениями стоек.на горизонтальных направляющих и углами поворота
371
r;i:i,-i ;;iMTi), что счнпямо ;; псобходи- MijtTbio icjo/ibnonaiiHK сложиbix следя- ;;г; ::-:1к г ;:гп cfCTOxio yHpoB/ieiUifl ма -
гм-i . Ч1С,чо опорных стоек
or;i:i Ko;i:yr: oriiijaoTCvi но только п;1 : 1/п , но гюпние IT; ипх, KptiBWUf|;оч:г:м- ПМжоира ма лнн1-1 кл.1ак-:п гикк:кн :йг у; ;OJ;;TIO, aocjiOJ;bKy В систег ге иус ;- Олкл--зе йля -птсло управляюцях
;В1;г11 1.п препослодит чпсло степеней лод диясности и поэтому опорные сгонки ироскпль: ы;за7ч, по оемло, чго дет к перегрузка двигателей и к позьюжJioc:: и иололЛ; зкипа/ка,
11::;л1.. паобреггения - улуча1е 1ие управ- siextocrn ;угем сбеспечоция соочзетсг :-Л1 л;с; л Сгеллшй подвкжпостн A-iaLUiiiii,; incjiy сопслгкисающнхся с грулгом опер-
-: ЬГ/: т: ,Зто дсст;.гается том, что -орлзо таа1;пая ТПг;раЕЛп Ощая калсцой опорной С ойки снаб 1се}га шариирко прикрепленным к пей 6ала :Су:рогЛ, свободный конец к;оторог з iiorionoTHo з-ста1ювлен в корпусе н кинемаТггюски свкоап лерез трехпозиционную сцеппую муфту с балансиром стойки дру ГО1О бортп. тем, чго каждая сцепная муфта (о;(ер;кнт центрдльпую управляемую датликами к-кяпая с грунтом, поцвнжную гюдуг/Гуф1у и допоремекно сцепляемые с He;i дг:о краллке лолумуфхы, причем цод-i--. ра.)дл;ал лолумуфта связана подвяжныЬТ длидгд-длм соедипением с балансипом. па дл крайнлх лолумуфт жестко соединеi;a с корпусом, а другая - посредствсм передачи -. с аналогичной полум ф,. той балансира другого борта, а также тем что крепление ка/кдого баланснра к кс-п дусу и , оризонтальной направл:яю.(лей к балансиру выполнено носредством упругого элемента, например торсиона.
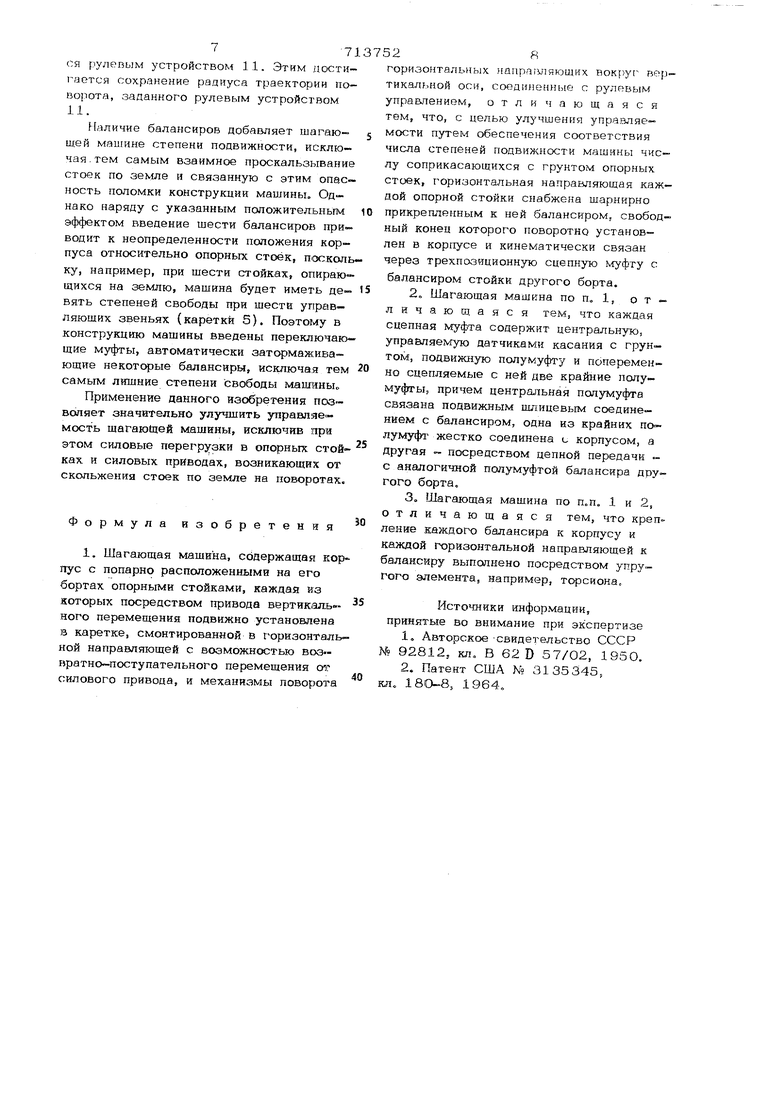
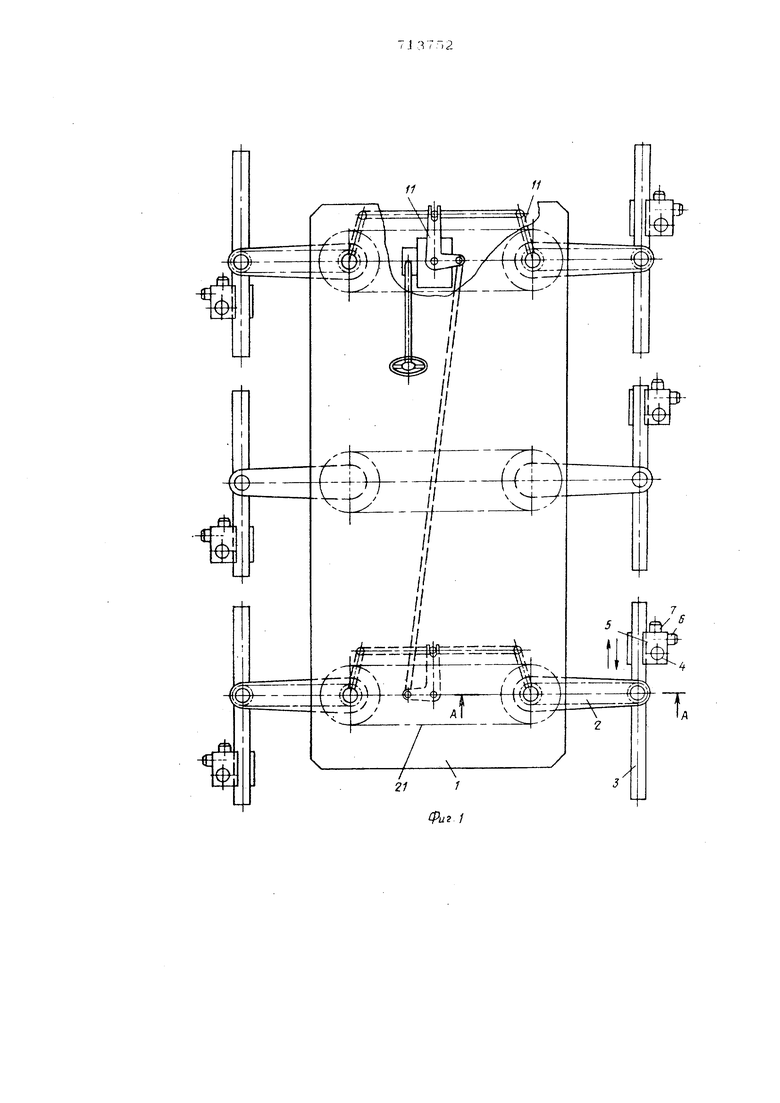
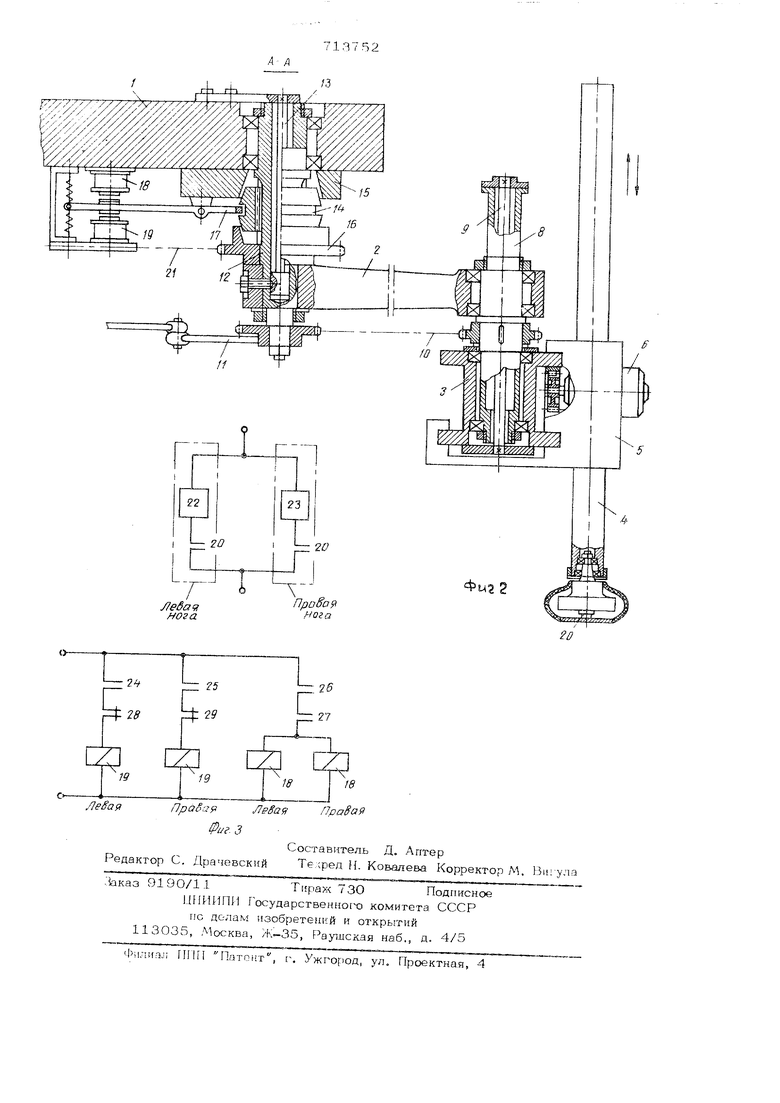
ria фигч 1 JЗoбpaжeн общий вид Hjoraющей машины; на фиг, 2 сечепие А-А на фиг, I (лодвеска стойки к кордус )f фкг, 3 - электрическая схема упрагшепио иодиеской опоротых стоек одного пле™ Лсшого пояса,
И агаюшая машина содержит корпус 1, к. KOTopoivsy посредством балансиров 2 .гл-рЮ нр-исоединены горизонтальные т-гапоавЛ ло:л11с 3 опорных стоек 4, стойки 4 vcтпно1у ень; в каретках 5, относительно ко-тсрых они могут пере 1ещаться в вертикальном направлении лод действием привгдо вертикальгюго перемещения 6. Каротки ; 1 СПОК очередь имеют позможнест;, пЕ г1емОл1атьси но направляющим 3
2,
под дейстгзиолт иг пводол /. Награ,5, 3 подвижно посдичпиа яа г/ит 8, и ч еюший возможность пор орачиватг5Ся относи ejiB- но балансира 2. собей иапг;;и:як;- шая 3 и вал 8 спя:1аны тореиопогл 9, t3i;i S связан ценной ггоредачей 10 с р;леБЬ;М устройством 11. Балапс р 2 жестко закреплен ка залу J. 2, ;н.ео;|(ем БОЗМОЖ- ноств новорачиваться о:г,осл,ел1:,г1,о кор- :уса 1. В);утри вале 12 уг неБ7;ек тор СИОН 13, Один конод котородс: соед1Г ен с балансирол 2. э цруг-сй с корпусом 1.
На валу 1 2 на шлицах устано57;ена трехпозкдгюнная сценися муфта 14с по лумуфтами 15 « 16 с лереключающим рь чагом 17 и унраЕля:;оии1глй электромагнитами 1й в 19, уста:гоЕленныгли на корпусе 1., Элекиромагдтг 1 IS и 19 электрилескн связаны i; и.саечль)л нереклю лателем 20, установледн}: на нижне: ; ко1;де стойки 4. Верхняя нолуглуф -а 15 закреплена на корпусе 1, а нижняя нолумуфта J (JS подви {но носаже ная на пал 12, СБйзада деньгой передачей 21 с нижней полумуфтгй 10 стойкк 4 нроти Боноложного борта того же самого нле чевого нояса машины, додшсжа этой но-гн выполнена аналогиню. Конструкции подвесок нерсднегс и заднего плечевых доясоБ одинакозьь. Подвеска средне: пары CiceK отличается от подвесок Г|Г;рец,,. ДОН н задней дар отсутствдел рулеЕ с„ : унравледня 11 и Г еред;:нд 10.
Элэкт-жческая схема содержит колеч-ные нереклю атели 20, |)аспогожен ; ie п опорных частях стоек которые являк тся патчиками касан я ног с грунтог и Нормально открьгтьге ко;ггакт1л нереклюла™телей находятся в негн; П1;тандй лагуЯ1ИК реле 2 и , коммугирук;цих цени нктениг электрол-агд- Игов 18 и 10. управляющих наложением лйугЬты 14. того, електричесхая схема содержит liopмально открытые контанть; 24, 25. 2R и 27 и нормально закрытые контакты 28 и 29, находящиеся ..елях ниталия элекчромагннтов 18 и 10. оеушестнля-. ших надлежатцуго ком ;утацию муфт в aBHCHMocTVi от комб:-шад,ик олсггных тоек 4.,
При движении шагаю1лей машнн -,1 liapa тоек 4 каждого из трех плечевых пеяов шестиногой шагающей машины может аходиться тз одном из нсложсллпн
В нервом ноложснип обе стойки ; (правая и левая) стоят не земле. В том случае датчикл касаний - конц Ллые
57
ют цепи питания обеих катушек реле 22 и 23. Это приводит к тому, что контакты 28 и 29 размыкаются, а контакты 26 и 27 замыкаются, подавая питание электромагнитам 18 этих стоек, С помощью рычагов 17 электромагнить 18 вводят муфты 14 Б зацепление с нижними полумуфтами 16 обеих стоек 4, тем самым связывая правый и левый балансиры 2 между собой через цепную передачу 21 И в этом случае система из двух балансиров 2 имеет одну степень подвижности относительно корпуса 1, т е. каждый балансир имеет возможност поворачиваться относительно корпуса 1, но независимо, а синхронно, благодаря связи 21.
Во втором положении только одна из стоек 4, например, правая опирается на землю, а другая - левая поднята и переносится вперед в исходное для шагания г апожение. При этом концевой переключатель только правой стойки 4 замыкает цепь питания катушки реле 23, а переключатель 20 левой стойки 4 не включается и катушка реле 22 остается обесточенной. При этом контакт 28 размыкается, а контакт 24 замыкается, подавая ток на электромагнит 19 правой стойки 4, Ее рычаг 17 вводит муфту 14 в зацепление с полумуфтой 16, жестко соединяя балансир 2 только правой стойки 4 с корпусом 1, Муфта 14 левой стоки 4 находится при этом в нейтральном положеник. Левый балансир 2, поворачиваясь под действием торсиона 13 вместе со своим валом 12, устанавливается в перпендикулярное положение по отношению к продольной оси корпуса 1. Та- укм образом, в этом случае полубаланси 2 спорной стсйки 4 жестко соединен с корпусом ,1, а балансир 2 стойки совершающей перенос, соединен с корпусом 1 через торсион 13
Третье теоретически возможное положение стоек отличается тем, что обе стойки одного плечевого пояса одновременно оторвань от земли. Однако, в используемых на практике статически устойчивых походках такое положение не встречается и поэтому здесь не рассм т ривается,
Для осуществления криволинейного движения шагающей машины направляю- цие 3 поворачиваются рулевым устройством 11 относительно балансира 2 вокруг оси вала 8, Движение от рулевого устройства 11 к направляющим 3 пере-
26
дается посредством цепной передачи 10 1 торсчона 9. При этом поворот направляющей 3 }ш угол, заданный рулевым устройством 11, происходит только в случае, если направляющая 3 свободна, т. 9. стойка 4 не опирается на землю, а находится вподнятом состоянии. Если стойка 4 опирается на землю, то направляющая 3 не поворачивается вслед за изменением положения рулевого устройства 11, а происходит только закручивание торсиона 9.
Таким образом, при отклонении рулевого устройства 11 в заданное положение направляющие 3 и балансирь 2, отклонившиеся в процессе движения от исхлдного для данного радиуса поворота угла, возвращаются в это положение под действием торсионов 9 и 13 после отрыва очередной стойки 4 от земли.
Направляющие 3 среднего плечевого пояса, которые не связаны между собой рулевым устройством 11, под действием торсионов 9 в процессе переноса стоек 4 занимают положение, параллельное продольной оси корпуса 1, в котором они должны находиться в момент постановки стоек 4.
Работа описанных кинематической и электрической схем обеспечивает в любой момент шагания точное соответствие чис ла стетеней подвижности числу ее опорных ног, чем устраняется как проскальзывание ног, так и неопределенность движения корпуса 1.
Система из стоящих на земле стоек 4, поворотных направляющих 3, балансиров 2 и корпуса 1 машины составляет единый шарнирно-рычажный механизм, в котором опорные подпятники стоек 4 являются неподвижным звеном, а движение направляющих 3 относительно кареток 5 со стойками 4 - управляющим цвижением. При этом в процессе движения каретки 5 по направляющей 3 угол поворота направляющей 3 как относительно балансира 2, так и относительно корпуса 1 не остается постоянны, а изменяется в соответствии с законами кинематики. Однако, всякий раз, когда стойка 4, закончив рабочий ход, поднимается в воздух и движение каретки 5 реверсируется, положение и балансира 2 и направляющей 3 восстанавливается под действием торсионов 13 и 9. При этом балансир 2 занима-Ьт перпендикулярное к продольной оси корпуса 1 пачсжение, а угол отклонения направляющей 3 зал;)ог- ся рулевым устройством 11. Этим достигается сохранение радиуса траектории поворота, заданного рулевым устройством 11. Наличие балансиров добавляет шагаю- щей машине степени подвижности, исключая. тем самым взаимное проскальзывание стоек по земле и связанную с этим опасность поломки конструкции машины. Однако наряду с указанным положительным эффектом введение шести балансиров при водит к неопределенности положения корпуса относительно опорных стоек, п эскол ку, например, при шести стойках, опирающихся на землю, машина будет иметь девять степеней свободы при шести управляющих звеньях (каретки 5). Поэтому в конструкцшо машины введены переключаю щие муфты, автоматически затормаж;ива- ющие некоторые балансиры, исключая тем самым лишние степени свободы машины.. Применение данного изобретения воляет значительно улучшить управляемость щагаюШей машины, исключив при этом силовые перегрузки в опорных стойках и силовых приводах, возникающих от скольжения стоек по земле на поворотах. Формула изобретения 1. Шагающая машина, содержащая кор пус с попарно расположенными на его бортах опорными стойками, каждая из которых посредством привода вертик(ал.ь-ного перемещения подвижно установлена в каретке, смонтированной в горизонталь ной направляющей с возможностью возвратно-поступательного перемещения сп; силового привода, и механизмы поворота горизонтальных н 1Г1ра(У1яющнх вокруг верикальной оси, соедяненные с рулевым праатением, отличающаяся тем, что, с целью улучшения управляемости путем обеспечения соответствия числа степеней подвижности машины числу соприкасающихся с грунтом опорных стоек, горизонтальная направляющая каждой опорной стойки снабжена шарнирно прикрепленным к ней балансиром, свободный конец которого поворотно установлен в корпусе и кинематически связан через трехпоаиционную сцепную муфту с балансиром стойки другого борта. 2„ Шагающая машина по п 1, отличающаяся тем, что каждая сцепная муфта содержит центральную, управляемую датчиками касания с грунтом, подвижную полумуфту и попеременно сцепляемые с ней две крайние полумуфты, причем центральная полумуфта связана подвижным шлицевым соединением с балансиром, одна из крайних по лумуфт жестко соединена с корпусом, а другая - посредством цепной передачи с аналогичной полумуфтой балансира дру гого борта, 3. Шагающая машина по п„п. 1 и 2, отличающаяся тем, что крепление каждого балансира к корпусу к каждой горизонтальной направляющей к балансиру выполнено посредством упругого элемента, например, торсиона. Источники информации, принятые во внимание при экспертизе 1,Авторское -свидетельство СССР № 92812, кл, В 62 D 57/02, 1950. 2.Патент США N 3135345, кл. 18О-8, 1964,
fput 1
