(54) ПОВОРОТНОЕ УСТРОЙСТВО ШАГАЩЕЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоопорное шагающее транспортноеСРЕдСТВО | 1979 |
|
SU821282A1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| Шагающая машина | 1978 |
|
SU713752A1 |
| ШАГАЮЩАЯ МАШИНА | 1995 |
|
RU2099230C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| Многокорпусное парусное судно | 1974 |
|
SU727510A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ МОСТОВ САМОХОДНОЙ МАШИНЫ | 2011 |
|
RU2464194C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |

I
Изобретение относится к транспорт.нын средствам высокой проходимости, а более точно к экипажам, оснащенным шагающими движителями ортогонального типа.
Известно устройство поворота шагающих машин, оснащенных движителями ортогональной схемы, каждый из которых содержит две направляющие, вертикальную и горизонтальную. Опорные элементы - ноги, двигаясь по этим направляющим под действием раздельных приводов, описывают необходимые для шагания траектории относительно корпуса. Криволинейное движение этих машин достигается поворотом горизонтальных направляющих, заключенных внутри .поворотных кареток, вокруг вертикальных осей этих кареток 1.
Недостатком этого устройства является то, что в процессе криволинейного движения машины, например при-дв.ижении по окружности постоянного радиуса при фиксированном положении
рулей, ноги машины перемещаются относительно ее корпуса по хордам, а не по дугам окружностей. В результате этого траектория центра-корпуса машины представляет собой ломаную линию. Скачки ускорений, появляющиеся в местах излома этой машины, делают движение машины некомфортабельным, вызы вая добавочные динамические нагрузки, вибрации, которые могут привести к
to
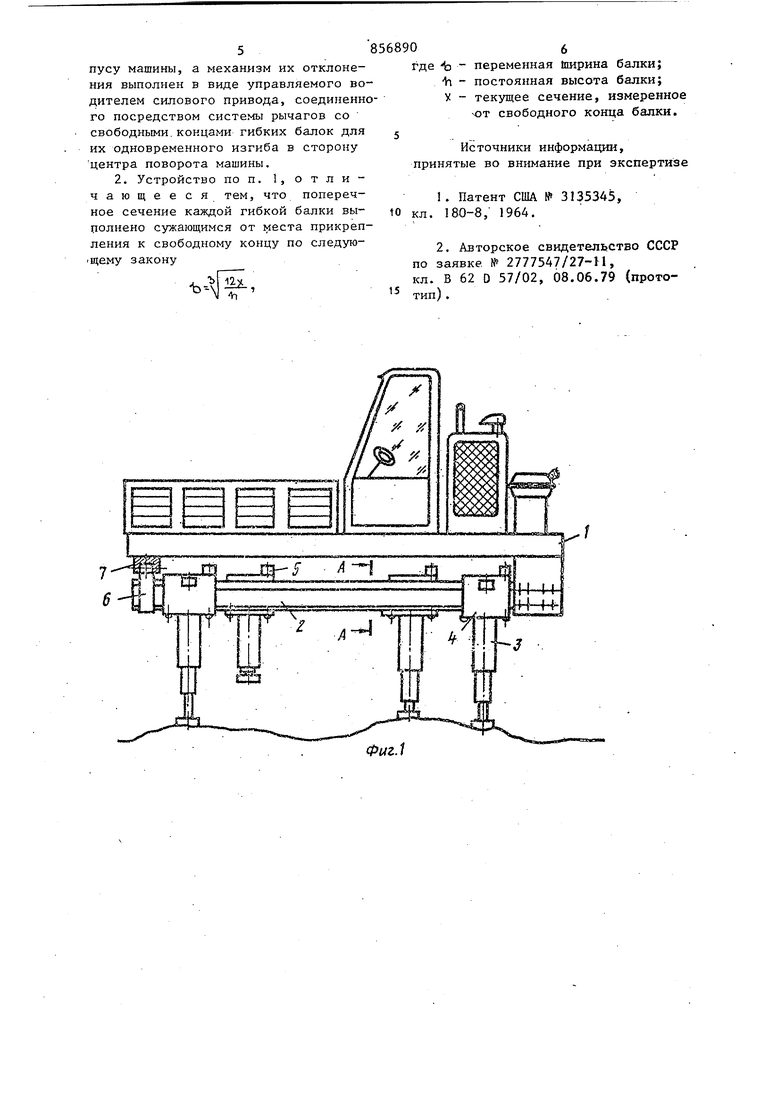
. ее ног. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является поворотное устройство шагающей машины, содержаISщее побортно расположенные продольные направляющие кареток ортогональных шагающих опор, соединенные с механизмом их отклонения в горизонтальной плоскости, причем шарнирно соединены с корпусом направляющие только четырех крайних ног, а направлякядае средних ног неподвижно закреплены на корпусе машины . 38 Однако в этом устройстве также Ле исключены проскальзывания ног по земле и рысканье корпуса при повороте машины. Цель изобретения - обеспечение комфортабельности криволинейного движения шагаю;щей машины. Поставленная цель достигается тем что в поворотном устройстве шагающей машины, содержащем побортно расположенные продольные направляющие кареток ортогонаЛьньк шагающих опор, ( соединенные с механизмом их отклонения в горизонтальной плоскости, направляющие каждого борта выполнены в виде одной сплошной гибкой балки, консольно прикрепленной к корпусу машины, а механизм их отклонения выполнен в виде управляемого водителем ci-шоврго привода, соединенного посредством системы рычагов со свободн ми кoнцa }и гибких балок для их одновреме ШО1 о изгиба в сторону центра п ворота машины, поперечное сечение ка дой гибкой балки выполнено сужающимс от места прикрепления к свободному концу по закону, который обеспечива|ет их изгиб по дуге окружности Ь | 2У/И , где b - переменна51 ширина балки; h - постоянная высота балки; X - сечение, измеренное от свободного конца балки. При жестких прямолинейных -поворот ных направляющих невозможно добиться плавного поворота корпуса без попере ных толчков. Изгибающиеся направляющие позволяют сделать это, причем в случае, когда направляющие имеют постоянную кривизну, т.е. изогнуты по дугам концентрических окружностей, движение корпуса происходит наиболее плавно без заданий и лишних добавочных движений. На фиг. показана шагающая машина, общий вид; на фиг. 2 - то же, вид снизу; на фиг. 3 - привод ноги. Шагаюптая машина содержит корпус 1 к которому снизу консольно прикреплены две горизонтальные направляющие 2 ног 3. Ноги 3 вьшолнены например в виде телескопических гидроцилиндров, закрепленных в каретках 4, имеющих возможность перемещаться вме те с этими каретками по направляющим 2 под действием фрикционных приводов 5. Подвижные концы направляющих 2 снабжены опорными подпятниками 6, смонтированными подвижно в криволинейных желобах 7. На корпусе 1 установлено выполненное в виде червячной передачи рулевое устройство 8 с рулем 9, аналогичное применяемому в автомобилях. Рулевое устройство 8 снабжено вилкой JO, связанной с рулевой трапецией, образованной рычагами I и J2, которые посредством вилок J3 связаны с подпятниками 6. Устройство работает следутоищм образом. При повороте руля 9 рулевое устройство 8 поворачивает вилку JO, которая посредством рулевой трапеции с рычагами JJ и J2 и вилками.J3 отклоняет концы направляющих 2, причем конец направляющей, расположенный ближе к центру поворота, отклоняется рулевой трапецией на большую величину. При этом упругие направляющие 2 изгибаются, образуя дуги концентрических окружностей с общим центром в центре поворота машины. Применение изобретения позволяет получить движение опорных концов ног относительно корпуса по дугам концентрических окружностей. При этом движение центра тяжести машины происходит по гладкой кривой, т.е. поворот происходит плавно, без скачков ускорения и связанных с ним рывков и ударов. Это обеспечивает большую комфортабельность движения благодаря снижению динамических нагрузок на машину, облегчение условий ее работы и, следовательно, повьлиение надежности по сравнению с машинами с жесткими поворотными Направляющими. Формула изобретения . Поворотное устройство шагающей машины, содержащее побортно расположенные продольные направляющие кареток ортогональных шагающих опор, соединенные с механизмом их отклонения в горизонтальной плоскости, отличающееся тем, что, с целью обеспечения комфортабельности криволинейного движения шагающей машины, направляющие каждого борта выполнены в виде одной сплошной гибкой балки, консольно прикрепленной к корпусу машины, а механизм их отклонения выполнен в виде управляемого водителем силового привода, соединенного посредством системы рычагов со свободными.концами гибких балок для их одновременного изгиба в сторону центра поворота машины,
где fe - переменная ширина балки; h - постоянная высота балки; У - текущее сечение, измеренное -от свободного конца балки.
- ..
Источники информации,
принятые во внимание при экспертизе
. Патент США № 3135345, кл. 180-8, 1964.
/
