.. Изобретение относится к области робототехники и может быть использовано при создании устройств для управления айаптивнь1ми роботами технологического конвейера.
Известно устройство для управления адаптивным роботом Lll содержащее последовательно соединенные блок ввода изображения, выполненный в виде лииейки фотоватчнков конвейера, блок определения координат центра тяжести, блок преобразования координат и блок формирования сигналов управления, коммутатор команд, соединенный с блоками определения координат тяжести и блоком преобразования координат. Область применения такого устройства ограничена, так KaiP управляемый им робот может работать только с объектами, соответствующая проекция которых имеет форму круга или форму, близкую к прямоугольной,
Наиболее близким техническим решением к изобретению является устройство , содержащее последовательно соеци-
ненные блок ввода изображения, блок определения центра тяжестив блок преобразования координат и вычислительный 6noKs последовательно соединенные коммутатор, блок сравнения и блок управланкя и блок памяти первый вход которого поцключен к вькоду коммутатора,. а выходы - ко вторым входам блока сравнения.
Известное устройство имеет ограниченную область применения потому что классифицирует каждый объект путем сравнения значений признаков образа этого объекта с эталонными значениями тех же признаков образов, хранящихся в блоке памяти. Это снижает качество работы системы управления в том случае, когда график функции распределения вероятностей значений,признаков образов по множеству объектов .заданных классов отличен от прямоугольной формы.
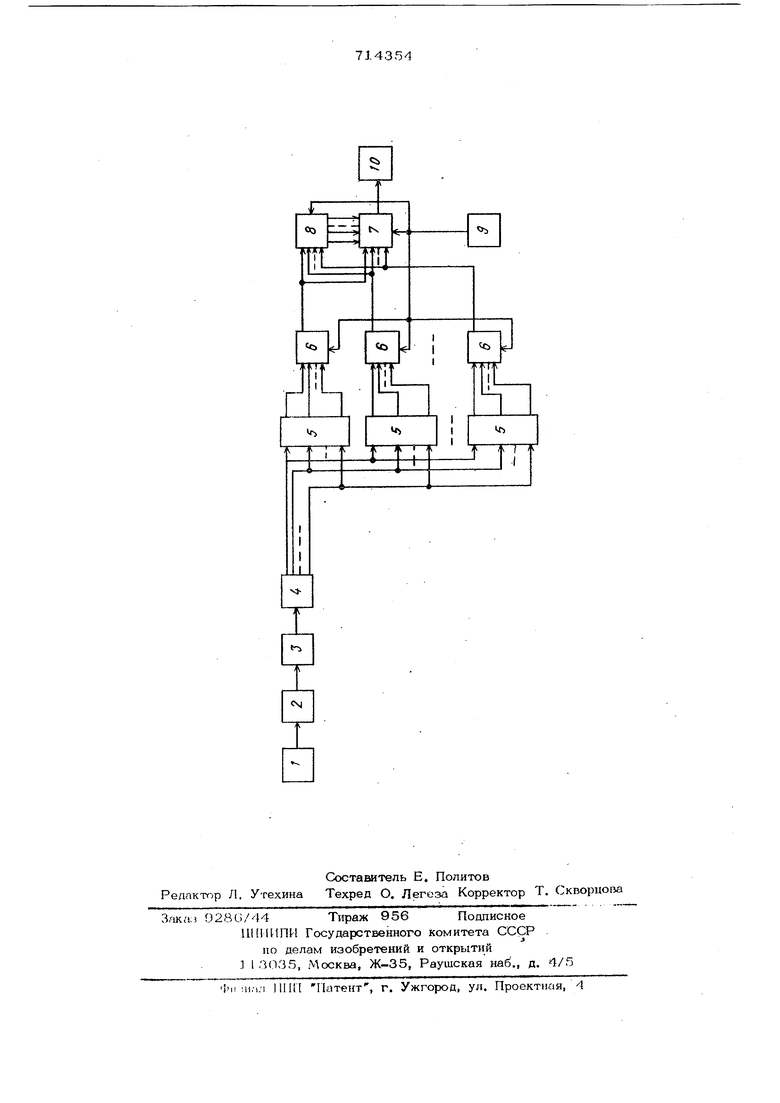
Целью изобретения является расшире ние области применения устройства. Сущность изобретения заключается том, что предложенное устройство соде жит блоки умножения и сумматоры, пе вый вход которых соединен с выходом коммутатора, выход - с соответствующими вторыми входами блока памяти и блока сравнения, а вторые входы - с в ходами соответствующих блоков умнож ния, одноименные входы которых подкл чены к соответствующему входу вычислительного блока, а выходы - ко вторым входам соответствующего сумматора. На чертеже представлена функционал ная схема устройства. Оно содержит блок 1 ввода изобра жения, блок 4 определения пентра тяжести, блок 3 преобразования координат, вычислительный блок 4, блоки умножения 5, сумматоры 6, блок сравнения 7, б.юк памяти 8, коммутатор 9 и блок управления 10. Устройство работает следующим образом. Блок ввода изображения 1 формируе изображение объекта, которое через блоки 2 и 3 поступает в вычислительный блок 4. Вычислительный блок 4 определяет численное значение признак образов, например, вычисляет автокорреляционные функшш, определяет параметры объекта и некоторые вторичные признаки образов (отношение квад рата периметра к площади, применяюще наибольщее значение, равное 4it для круга, и др.). Значения каждого призна умножаются в блоках 5 умножения на заданные постояннъге коэффициенты. Затем по сигналу коммутатора 9 значения произведений всех признаков на соответствующие коэффициенты суммируются в сумматорах 6. При этом знаковый разряд выхода каждого сумматора определяет положение точки, соответствующей модели объекта, относительно заданной набором коэффициентов умножения разделяющей плоскости пространства признаков образов. В режиме обучения информация из знаковых разрядов сумматоров 6 поступает в блок памяти 8, где заноси1 ся в соответствующие ячейки памяти по сигналу коммутатора 9. В режиме работы информация знаковых разрядов сумматоров 6 поступа в сравнения 7, куда одновременно поступает информация из блока памяти 8. По сигналу коммутатора 9 блок сравнения 7 анализирует на совпадение входные сигналы и выдает сигнал на блок формирования сигналов управления. Значения коэффициентов умножения для блоков умножения 5 выбраны на основании анализа априорной информации об объектах так, чтобы классификация производилась в соответствии с техническими требованиями, а при отсутствии априорной информации значения коэффипиентов могут быть заданы путем настройки устройства п6 контрольной выборке объектов. Область применения устройства расширена за счет возможности распознавания объектов произвольной формы. Формула изобретения Устройство для управления адаптивным роботе, содержащее последовательно соединенные блок ввода изображения, блок определения центра тяжести, блок преобразования кос динат и вычислительный блок, последовательно соединенные кс мутатор, блок сравнения и блок управления, а также блок памяти, первый вход которого подключен к выходу коммутатора, а выходы - ко вторым входам блока сравнения, отлича. ющее с я тем, что, с целью расширения области применения устройства, оно содержит блоки умножения и сумма-горы, первый вход которых соединен с выходом коммутатора, выходы - с соответствующими вторыми входами блока памяти и блока сравнения, а втор)ые нходы - с выходами соответствующих блоков умножения, одноименные выхоры - которых подключены к соответствующему входу вычислительного блока, а выходы ко вторым входам соответствующего сумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 457790, кл. (q О5 В 15/ОО, 1973. 2.Авторское свидетельство СССР № 470791, кл. Ст О5 В 15/00, 1974 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 1991 |
|
RU2022366C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ВИДЕОСИГНАЛА | 1989 |
|
RU2042185C1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Устройство для вычисления координат | 1978 |
|
SU752350A1 |
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Цифровой функциональный преобразователь | 1980 |
|
SU955082A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |