(54) АСИНХРОННЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| Асинхронный частотно-регулируемый электропривод | 1981 |
|
SU957403A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1978 |
|
SU884065A2 |
I
Изобретение относится к электроте; нике, а именно к области электропривод переменного тока и может бь1ть использовано в подъемно-транспортных механизмах.
Известны асинхронные тиристОрайё электроприводы с отрицательной обратной связью по напряжению тахогенератора fl
Основным недостатком, ограничива щим применение тахогенераторов Б качестве датчиков скорости, являетсй нб- обходимость использования дополнительной электрической машины постоянного тока, требующей места для установки и точной центровки с валом двигатели, а в ряДе случаев - и второго свободного конца вала двигате ля.
Известны асинхронные электроприводы, в которь1х обратная связь по частоте токов ротора используется для дискретного управле1шя двигателем, в котором частота токов ротора снимается непосредственно с колец двигателя, преобразуется в постоянное напряжение,
котброе сравнивается с заданным. Управление двигателем (пуск, торможение) осуществляется ступенчатым переключением контакторов в цепи ротора 2. Преобразователь не может быть использован для непрерывного упраЕигения двигателем вследствие невысокой точности его работы.
Известен также асинхронный тиристорный электропривод, включающий асинхронный двигатель с фазным ротором, тиристорный коммутатор с блоком фазового управления, включеш1ый в цепь ротора асинхронного двигателя, последовательно соединенные задающее устройство, блок сравнения, выход которого связан со входом блока фазового управления и датчик частоты токов ротора З .
Однако известное устройство имеот недостаток, заключающийся в том, что требуется аналоговая вычислительная машина с интеграторами, блоками умножения, деления и пр. Точность работы такой системы в большой степени зависит от качества настройки каждого элемента вычислительной машины, что представляет определенную трудность.
Цел ею изобретения 5шляютсй повышение жесткости-механических характеристик, упрощение эксплуатации и повышение надежности.
Для этОРо в известном асинхронном тиристорном электроприводе датчик чистоты токов ротора вьшолнен в виде последовательно соединенных фильтра, формирователя прямоугольных сигналов, сумматора, формирователя стандартных импульсов, преобразователя частоты в напряжение и усилителя-сумматора, причем выход последнего подключен к одному из входов блока сравнения, а вход фильтра подключен к кольцам ротора двигателя.
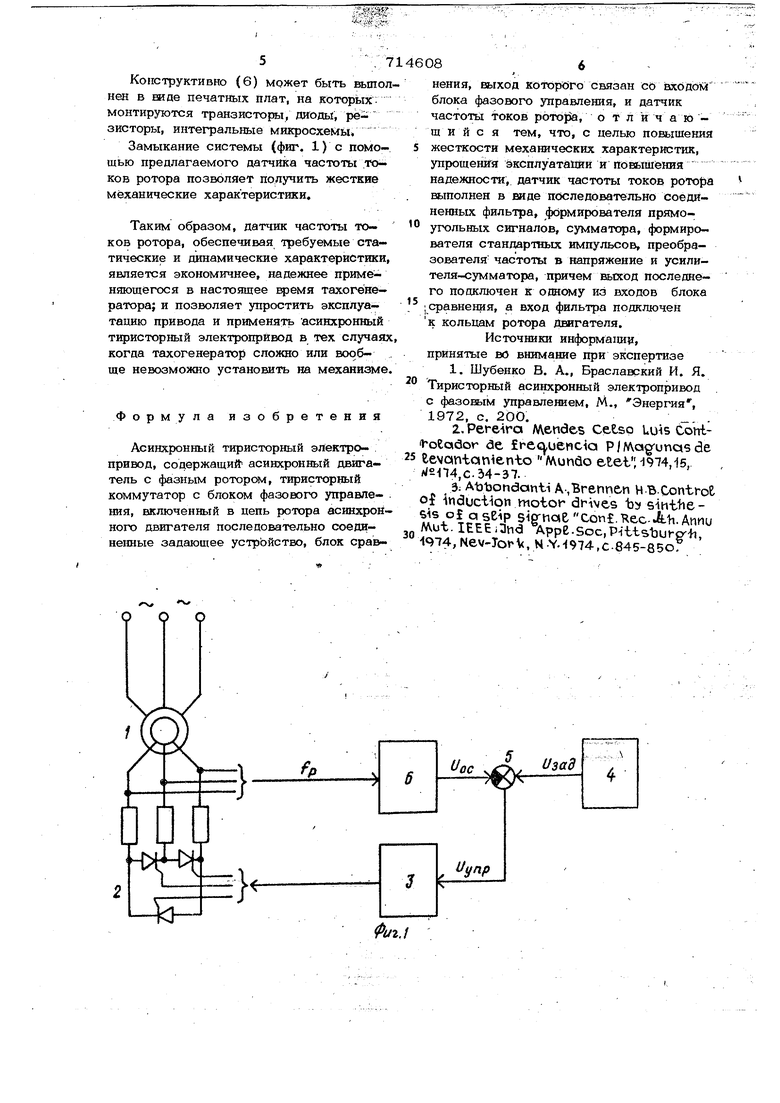
На фиг. 1 представлена схема сйпрвой ; части электрбЯрИБОда и структурная схема цепи обратной связи; на фиг, 2 - структурная схема датчика частоты Токов ротора.
Асинхронный тиристорный электропривод содержит асинхронный двигатель с фазным ротором 1, тиристорный коммутатор 2. с блоком 3 фазового управления, задающее устройство 4, блок 5 сравнения, выход которого связан со входом блока 3 фазового управления и датчик 6 частоть токов ротора, вход которого подключен к кольцам ротора двигатеНяГ, а выход - к одн6м;у из входо блока сравнения.
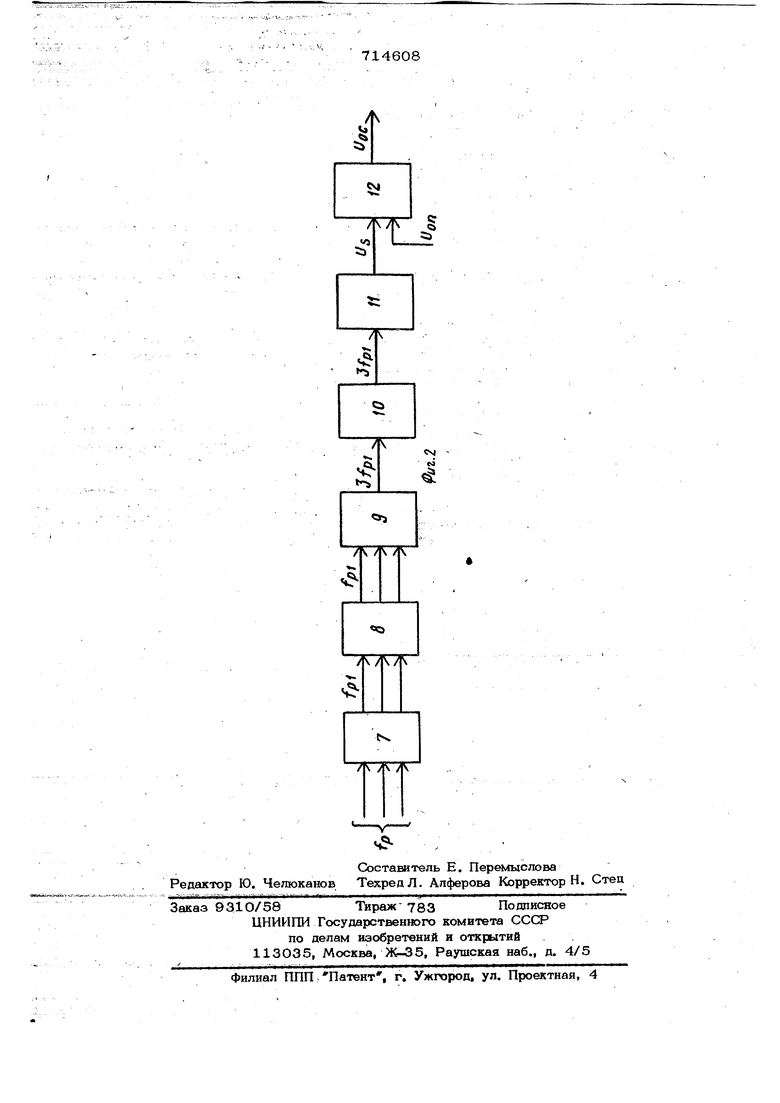
На фиг. 2 изображен датчик частоты Токов ротора, состоящий из последовательно соединенных фильтра 7, формирователя 8 ттрямоутолыных сигналов, сумматора 9, формирователя 10 стандартных импульсов, преобразователя 1- частоты в напряжение, усилителя-сумматор
Основная сложность, возникающая при использовании частоть токов ротора в качестве сигнала обратной связи,« это наличие вьхсших гармонических в кривой тбка ротора при тиристорном уп рйвлении в то же время лишь частота любой одной (Б частности, первой) гармонической токов ротора ( f р-) прямо пропортшональна скольжению :
« -с 5 .
где . - частота токов статора. Кроме того, известно, что с изменение скорости меняется не только частота, ,но и амплитуда нецг11эя ЛЙшя ротора.
Г . - .
714608
Датчик обратной связи преобразует частоту искаженного тиристорами тока ротора в напряжение, пропорциональное скорости двигателя.
Фильтр выделяет первую гармоническую напряжения частотой Ip, которое поступает на формирователь прямоугольных сигналов. Последний ограничивает амплитуду первой гармонической напряжения, превращая ее в прямоугольные сигналы той же частоты, но постоянной амплитуды, не зависящей от скольжения Прямоугольные сигналы ..трех фаз поступают на сумматор, который складывае IOC, утраивая таким образом частоту. Сигнал утроенной частоты, попадая на формирователь стандартаых импульсов, превращается в Сигналы той же частоты, но одинаковой формы и площади, независимо от частоты следования, т.е. от периода частоты fр,
Преобразователь .частоты в напряжение преобразует эти сигналы утроенной частоты в напряжение, величина которого пропорциональначастоте следования стандарТньтх импульсов, т.е. скольжению б , - .
Преобразователь частоты в напряжение построен на основе известного активного -фильтра низких частот с применением операционного усилителя постоянного тока. Такой фильтр обеспечивает высокий коэффициент передачи и минимальное запаздывание выходного сигнал
Известно, что. скорость.
.
Таким образом, имея сигаал Uc , несложно получить сигнал, пропорциональный скорости:
. гдеиоп- постоянное опорное напряжение Последнюю Ьпёрацщо и реализует-усилиТель-сумматор,. алгебраически суммирующий подводимые напряжения U и Ugи усиливающий сигнал, пропорциональнь и скорости k в k раз.
Выходное напряжение часТотытоков ротора монотонно изме няется от +10 В до -10 В при изменении частоты первой гармонической тока ротора от 25 до 75 Гц, что првзоляет надежно работать при скольжениях, лежащих в пределах О,5 +1,5. Таким образам, обеспешваются устойчивьте понижён1й 1е скорости двигателя в пределах от +0,5 до -0,5 номинальной (когда последний работает в двигательном режн мё и в режиме противовключения).
.
изад
ОС
Фиг.1 08 нения, выход которого связан сб входом блока фазового управления, и датчик частоты токов poTbija, о т л и ч а ю щи и с я тем, что, с целью пои 1шения жесткости механических характеристик, упрощения эксплуатации и повышения надежности, датчик частоты токов ротора выполнен в виде последовательно соединенных фильтра, формирователя прямоугольных сигналов, сумматора, формирователя стандартных импульсов, преобразователя- частоты в напряжение и усилителя-сумматора, причем вьгход последнего подключен к одному из входов блока сравнения, а вход фильтра подключен к кольцам ротора Двигателя. Источники информа1Ш11, принятые во внимание при экспертизе 1.Шубенко В. А., Браславский И. Я. Тиристорный асинхронный электропривод с фазовым управлением, М., Энергия, 1972, с. 200. . 2.Pet-eira /Wendes Cetsg Uuis Coni oeaeor de fi ec uencia P/Mag-unciede levantaniento /Aunflo etet, 1974,15, ,с. 54-37. 3; Afbondanti A-,Brennen H B-Controt f -induciion motor drives Ъ sihtlieл.4.. 5 -. Annu ut ЛЕЕЙ idhd Appe.SocipitTsbui-e-fi, Ne., N-V.1974,0-845-850.
УЧ7Г7Г
