(54) МЕХАНИЧЕСКАЯ РУКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU738863A1 |
| Механическая рука | 1981 |
|
SU1000268A1 |
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА ИЗ СОЧЛЕНЕНННЫХ ЗВЕНЬЕВ, ИМЕЮЩАЯ ШАРНИР СКВОЗНОГО СКОЛЬЖЕНИЯ | 1997 |
|
RU2161589C2 |
| Механическая рука манипулятора | 1985 |
|
SU1283076A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| ПРЕСС ДЛЯ ПОЛУСУХОГО ПРЕССОВАНИЯ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2007 |
|
RU2348518C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| Схват манипулятора | 1983 |
|
SU1104018A1 |
| Промышленный робот | 1977 |
|
SU846267A1 |
| ВЕДУЩИЙ МОСТ С ПОДВЕСКОЙ И СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТРАКТОР С УКАЗАННЫМ МОСТОМ | 2002 |
|
RU2277050C2 |
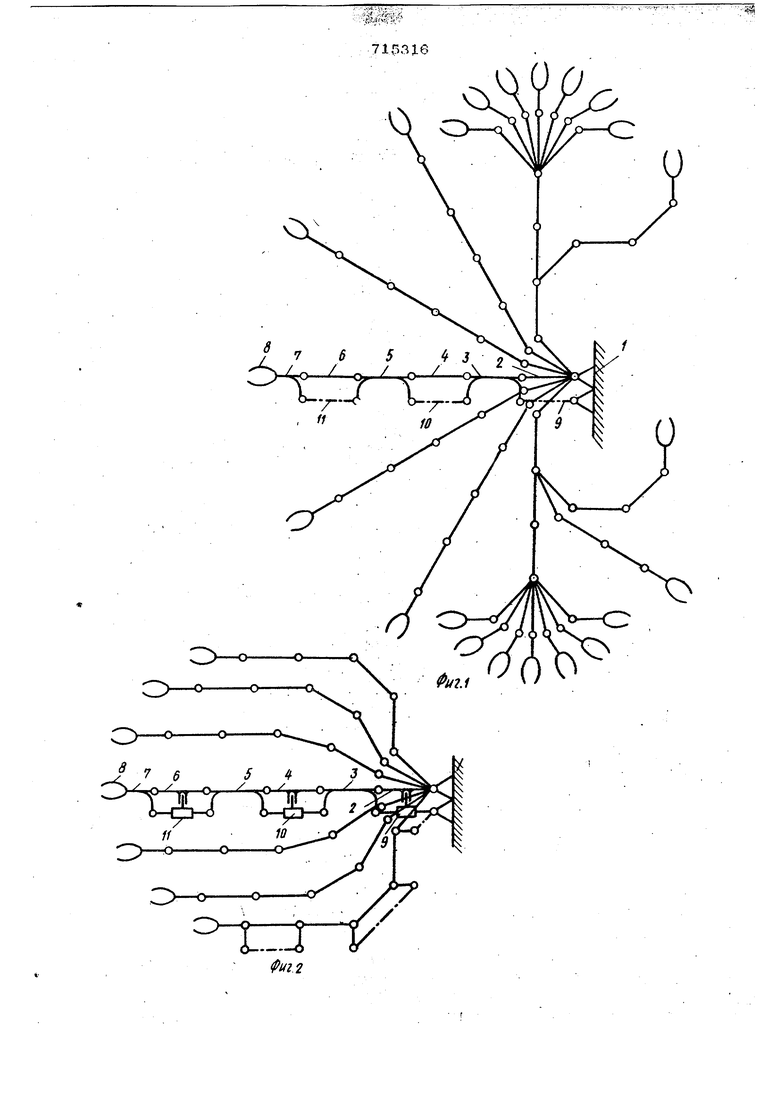
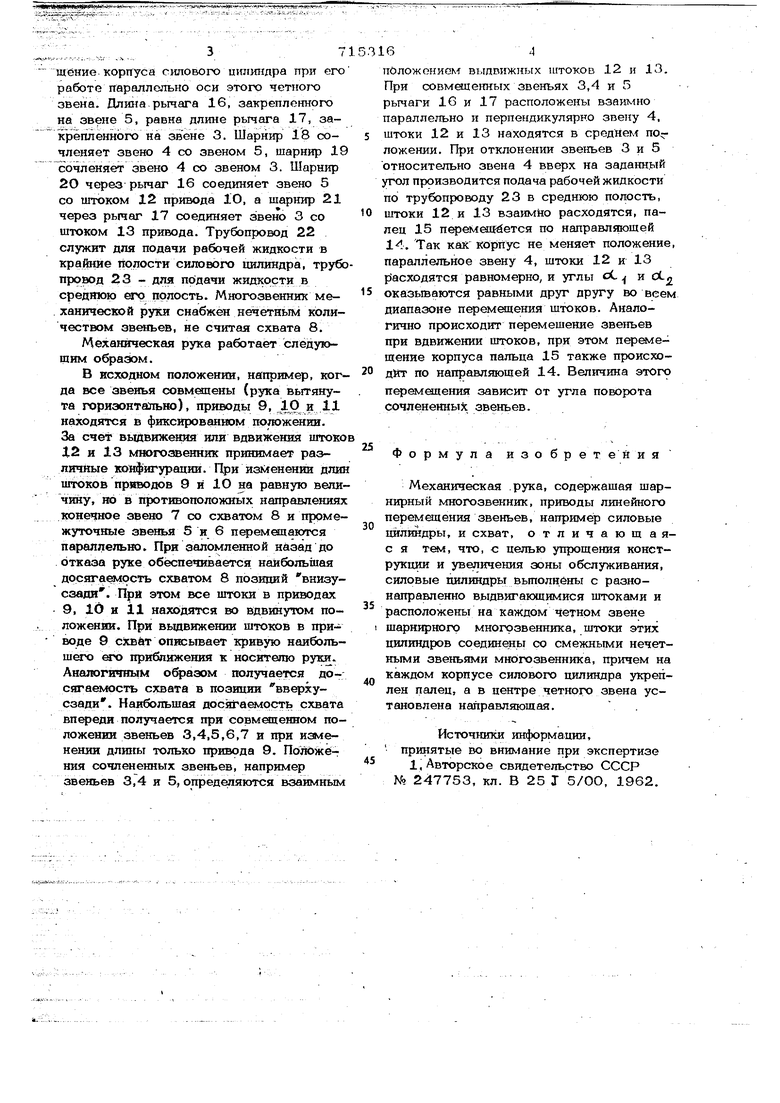
Изобретение относится к области машиностроения и может быть испояьэован в роботах-манипуляторах. И;№естна .механическая рука , сод)жащая шагншрный многозвенннк, приводы линейного перемещения, например силовые цилиндры, и схват l. Недостатком известного устройства является вьтолнение силовых циливдров. с однонаправленными вьшвигакнцимися штоками и их установка под шарниром сочленения нечетных с четными звеньями, что усложняет конструкцию pyiuj и уменьшает угол отклонения звеньев, а, следовательно, сокращает зону обслужив ния. Целью изобретения является упрощение конструкции и расширение зойы обслуживан Для этого силовые цилшздры выполнены с разнонаправленно выдвигакяцимис штоками и расположены на каждом четном звене шарнирного многозвенника, а штоки этих цилиндров соединены со смеж HbHviH нечетными звеньями многозвенника причем на каждом корпусе силового цилиндра укреплен палец, а в центре «тетно- го звена установлена направпяк)щая. На фиг. 1 изофажена схшла механической руки; на фш. 2 - схема парал- лельного перемещения схвата; на фиг. 3 схема наибольшего отклонения нечетных звеньев вверх; на фиг. 4 - схема совмещения положений смежных звеньев; на фиг. 5 - схема наибольшего отклонения нечетных звеньев вниз. Механическая рука состоит из шарнирного многозвенника, элемент 1 ко-горого совмешен с носителем руки, и из промежуточных звеньев 2,3, 4, 5 и Q,конечного звена 7, и схвата 8. Приводы 9, Ю и 11 линейногчэ перемодения расположены на каждом четном звене(2,4и 6) и вьшолнены в виде силовых цилиндров с двумя поршнями и разнонаправленно вьщвигакяцимися штоками 12 и 13, Установленная в середине четного звена направлаюшая 14, в которую входит палец 15 С1ШОВОГО цилиндра, обеспечивает переме ., ,,, 3 ,7 щёние. корпуса силового цилшшра при его работе параллельно оси этого четного звена. Длина рычага 16, закрепленного на звене 5, равна длине рычага 17, закрепленного на звене 3. Шарнир 18 сочленяет звено 4 со звеном 5, шарнир 19 сочленяет звено 4 со звеном 3. Шарнир 2О через рычаг 16 соединяет звено 5 со штоком 12 привода Ю, а шарнир 21 через рычаг 17 соединяет звено 3 со штоком 13 привода. Трубопровод 22 служит для подачи рабочей жидкости в крайние полости силового шшиндра, трубо провод 23 - дпя подачи жидкости в среднюю его полость. Многозвенник механической руки снабжен нечетным количеством звеньев, не считая схвата 8. Механическая рука работает следующим образом. В исходном положении, например, когда все звенья совмещены (рука вытянута горизонтально), приводы 9, 10 и 11 находятся в фиксированном положении. За счет вьшвижетгая или вдвижения штоко 12 и 13 мтюгозвенник принимает различные конфигурации. При изменении Длин штоков приводов 9 и 1О на равную величину, но в противоположных направлениях конечное звено 7 со схватом 8 и промежуточные звенья 5 и 6 перемещакугся параллельно. При заломленной назад до отказа руке обеспечивается наибольшая досягаемость схватом 8 позиций внизусзади. При этом все штоки в приводах 9, Id и il находятся во вдвинутом положении. При вьщвижении штотов в приводе 9 сзсвйт описывает кривую наибольшего етч приближения к носителю руки. Анатюгичным образом получается досягаемость схвата в позиции вверхусзади. Наибольшая досягаемость схвата впереди получается при совмещенном положении звеньев 3,4,5,6,7 и при изменении длины только привода 9. ПолОжё-г ния сочлененных звеньев, например звеньев 3,4 и 5, определяются взаимным ттОложонисм выдвижных штоков 12 и 13. При совмоценных звеньях 3,4 к 5 рычаги 16 и 17 расположены взаимно параллельно и перпендикулярно звену 4, штоки 12 и 13 находятся в среднем по ложении. При отклонении звеньев 3 и 5 относительно звена 4 вверх на заданн.ый угол производится подача рабочей жидкости по трубопроводу 23 в среднюю полость, штоки 12 и 13 взаимйо расходятся, палец 15 перемещается по направляюшей 14. Так как корпус не меняет положение, параллельное звену 4, штоки 12 и 13 р)асходятся равномерно, и углы сС и ОС оказьгоаются равными друг другу во всем диапазоне перемещения штоков. Аналогично происходит перемещение звеньев при вдвижении штоков, при этом перемещение корпуса пальца 15 также происходйт по направляющей 14. Величина этого перемещения зависит от угла поворота сочлененных звеньев. Формула изобретейия Механическая .рука, содержащая шарнирный многозвенник, приводы линейного перемещения звеньев, например силовые цилиндры, и схват, отличающаяс я тем, что, с целью упрощения конструкции и увеличения зоны обслуживания, силовые цилиндры вьтолнбны с разнонаправленно выдвигающимися штоками и расположены на каждом четном звене шарнирного многрзвенника, штоки этих цилиндров соединены со смежными нечетными звеньями мнОгозвенника, причем на каждом корпусе силового цилиндра укреплен палец, а в центре четного звена установлена направляющая. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР NO 247753, кл. В 25 J 5/ОО, 1962.
J
х
Х//ХХХ/Х/Х Фиг.5
19 3 Ч./
0иг. 21
/ jf///
/
w
/
/г.5
