(54) МЕХАНИЧЕСКАЯ РУКА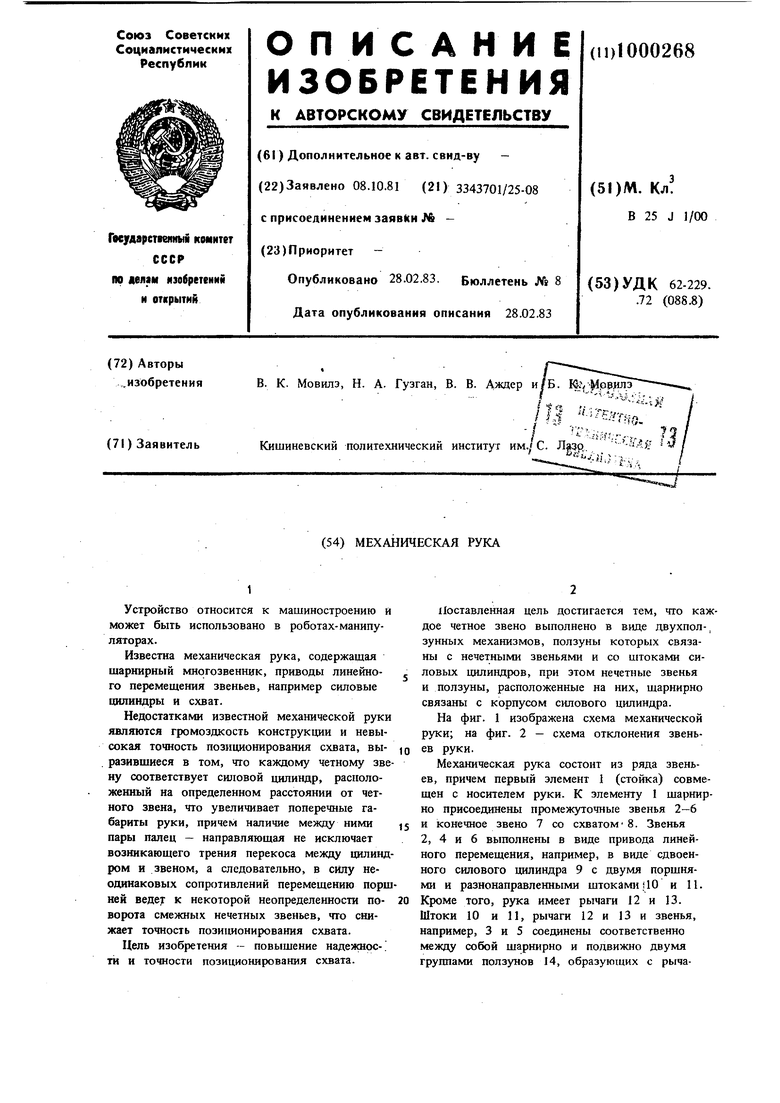
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU715316A1 |
| Механическая рука | 1978 |
|
SU738863A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| Манипулятор | 1982 |
|
SU1009754A1 |
| Устройство для сборки деталей | 1978 |
|
SU740472A1 |
| Рука манипулятора | 1981 |
|
SU1007959A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Устройство для сборки деталей | 1980 |
|
SU921754A1 |
| Устройство для установки упорных колец | 1979 |
|
SU848246A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
1
Устройство относится к машиностроению и может быть использовано в роботах-манипуляторах.
Известна механическая рука, содержащая шарнирный многозвенник, приводы линейно- . го перемещения звеньев, например силовые цнлиндры и схват.
Недостатками известной механической руки являются громоздкость конструкции и невысокая точность позиционирования схвата, вы- jg разившиеся в том, что каждому четному звену соответствует силовой цилиндр, расположенный на определенном расстоянии от четного звена, что увеличивает попергечные габариты руки, причем наличие между ними J5 пары палец - направляющая не исключает возникающего трения перекоса между цилиндром и звеном, а следовательно, в силу неодинаковых сопротивлений перемещению поршней к некоторой неопределенности по- 20 ворота смежных нечетных звеньев, что снижает точность позиционирования схвата.
Цель изобретения - повышение надеяшости и точности позиционнрования схвата.
11оставленная цель достигается тем, что каждое четное звено выполнено в виде двухпол-, зунных механизмов, ползуны которых связаны с нечетными звеньями и со штоками силовых цилиндров, при этом нечетные звенья и ползуны, расположенные на них, шарнирно связаны с корпусом силового цилиндра.
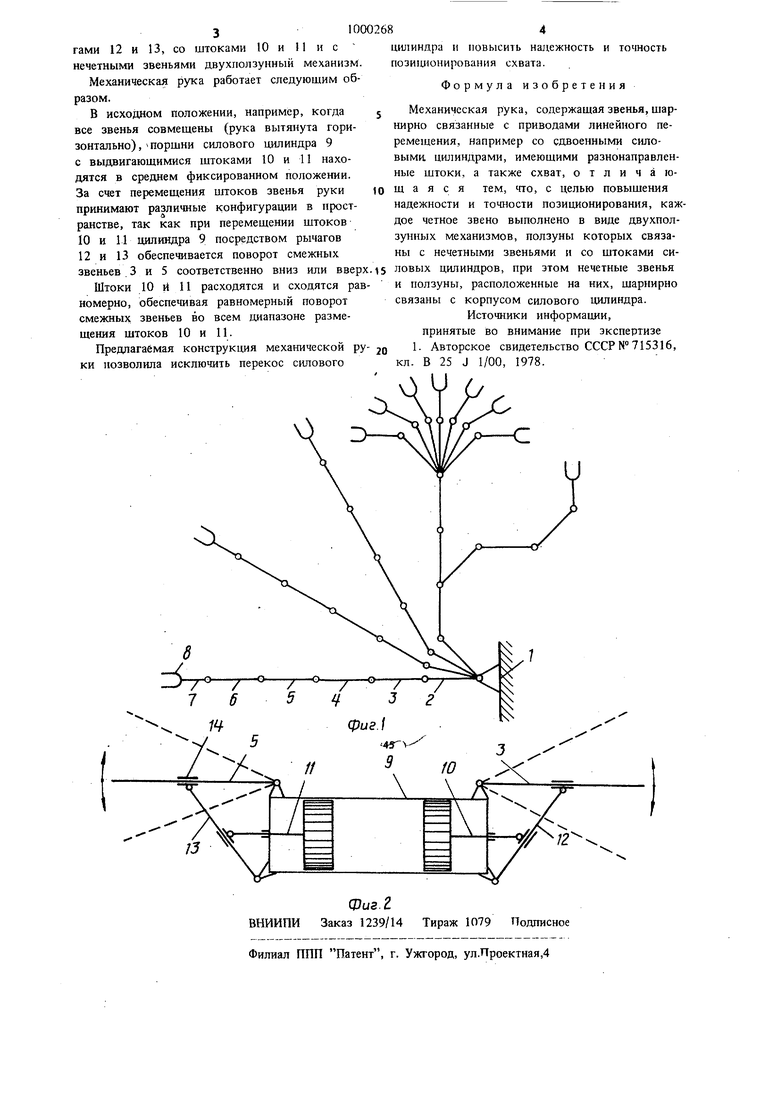
На фиг. 1 изображена схема механической руки; на фиг. 2 - схема отьспонения звеньев руки.
Механическая рука состоит из ряда звеньев, причем первый элемент 1 (стойка) совмещен с носителем руки. К элементу 1 шарнирно присоединены промежуточные звенья 2-6 и конечное звено 7 со схватом 8. Звенья 2, 4 и б выполнены в виде привода линейного перемещения, например, в виде сдвоенного силового цилиндра 9 с двумя поршнями и разнонаправленными штоками 10 и 11. Кроме того, рука имеет рычаги 12 и 13. Штоки 10 и 11, рычаги 12 и 13 и звенья, например, 3 н 5 соединены соответственно между собой шарнирно и подвижно двумя группами ползунов 14, образующих с рыча
