Изобретение относится к машиностроению и может быть использовано промышленных роботах. Известен промышленный робот, содержащий основание, поворотную коло ну, несущую механическую руку со . схватом и с Элементом в виде.параллелограммного механизма, смежные шарниры которого сМонтиров аны на ве тикальной и гориэонтсШьной каретках 1 . Недоста.тком данного устройства является то,что его кинематическая схема не обеспечивает перемещения схвата в декартовой системе координат, что существенно усложняет сист му управления, ухудшает точность и сужает технологические возможности. Цель изобретения - упрощение системы управления, увеличение точнос расширение технологических возможностей. Эта цель достигается тем, что пр мышленный робот снабжен дополнитель ным параллелограммным механизмом, н горизонтальной каретке установлена дополнительная каретка, а смежные шарниры параллелограммного механизм руки подсоединены к кареткам посред ством дополнительных шарнирных опор причем к опоре вертикальной каретки шарнирно подсоединено ведущее звено . дополнительного параллелограммного механизма,, ведомое звено которого также шарнирно связано со схватом. На фиг,1 изображен промышленный робот; на фиг,2 - кинематическая схема промышленного робота. Промышленный.робот (фиг.1) содержит основание 1, на котором установлена поворотная колонна 2, привод вращения поворотной колонны 3 и силовой привод 4, кинематически связанный с вертикальной кареткой 5, установленной в направляющих и имеющей возможность поступательного перемещения относительно поворотной колонны 2, На вертикальной каретке- 5 установлена дополнительная шарнирная опора 6, на которой с помощью общего шарнира 7 установлен силовОй параллелограммный механизм, содержащий ведущее звено 8t соединенное с помощью шарнира. 9 с ведомьам звеном 10-12 силового параллелограммного механизма, соединенных с. ведомым и ведущим звеньями шарнирами и направляющих звеньев 135 и 14 соответственно. На поворотной колонне 2 установлен силовой привод 15, кинематически связанный с
горизонтальной кареткой 16, установленной в направляющих и имеющей возможность прямолинейного перемещения относительно поворотной колонны. На горизонтальной каретке 16 установлен силовой привод 17, кинематически свя э анный с дополнительной кареткой 18, установленной в направляющих и имеЮ щик возможность прямолинейного пере мещения (перпендикулярно плоскости чертежа) относительно горизонтальной каретки 16. На дополнительной каретке 18 установлена ;(ополнйтельная шарнирная опора 19, которая с помощью шарнира 20 скреплена с ведущим звеном 8 силового паралледограммного механизма. К дополнительной шарнирной Опоре 6 с помощью шарнира 21 прикреплен дополнительный параллелограммный механизм, содержащий ведущее звено 22, скрепленное общим шарниром 23 с направляющим звеном 24 и с ведомым звеном 25 дополнительного параллелограммного механизма. На ведомом звене 10 силового параллелограмного механизма с помощью шарнира 26 установлен направляющий рычаг 27 схвата, к которому шарниром 28 присоединено ведомое звено 25 дополнительного параллелограммного механизма. На направляющем рычаге 27 установлен силовой привод 29, кинематически связанный с поворотным рычагом 30, установленным с помощню оси 31 на направляющем 27. на поворотном рычаге 30 установлен силовой привод 32, кинематически связанный с качающимся рычагом 33, уста новленным с помощью шарнира 34 на поворотном рычаге 30. На качающемся рычаге 33 установлен силовой привод 35, кинематически связанный со схватом 36, поворотно установленным на качающемся рычаге 33.
Промышленный робот работает следу ющим образом.
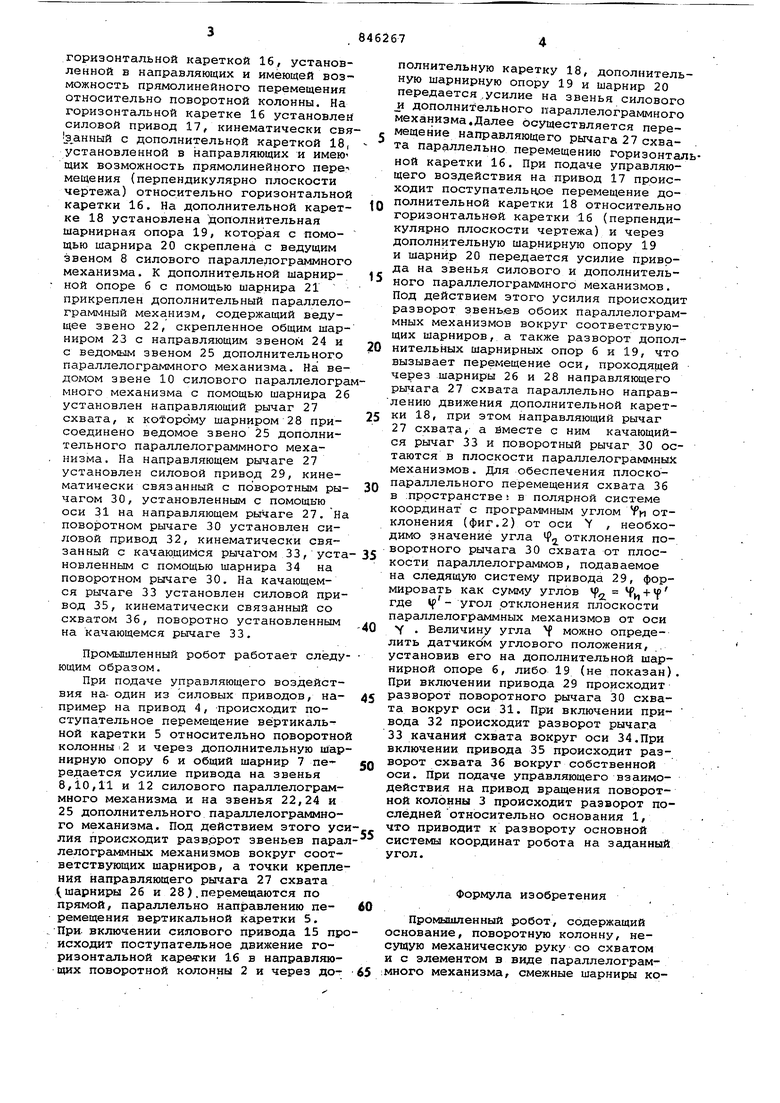
При подаче управляющего воздействия на- один из силовых приводов, например на привод 4, происходит поступательное перемещение вертикальной каретки 5 относительно поворотно колонны 12 и через дополнительную Шарнирную опору 6 и общий шарнир 7 передается усилие привода на звенья 8,10,11 и 12 силового параллелограммного механизма и на звенья 22,24 и 25 дополнительного параллелограммного механизма. Под действием этого услия происходит развррот звеньев паралелограммных механизмов вокруг соответствующих шарниров, а точки крепления направляющего рычага 27 схвата Iшарниры 26 и 28).перемещаются по прямой, параллельно направлению перемещения вертикальной каретки 5. При. включении силового привода 15 присходит поступательное движение горизонтальной каретки 16 в направляю «их поворотной колонны 2 и через дополнительную каретку 18, дополнительную шарнирную опору 19 и шарнир 20 передается,усилие на звенья силового дополнительного параллелограммного механизма.Далее осуществляется перемещение направляющего рычага 27 схвата параллельно перемещению горизонталной каретки 16. При подаче управляющего воздействия на привод 17 происходит поступательное перемещение дополнительной каретки 18 относительно горизонтальней каретки 16 (перпендикулярно плоскости чертежа) и через дополнительную шарнирную опору 19 и шарнир 20 передается усилие привода на звенья силового и дополнительного параллелограммного механизмов. Под действием этого усилия происходи разворот звень.ев обоих Параллелограммных механизмов вокруг соответствующих шарниров, а также разворот дополнительных шарнирных опор 6 и 19, что вызывает перемещение оси, проходящей через шарниры 26 и 28 направляющего рычага 27 схвата параллельно направлению движения дополнительной каретки 18, при этом направляющий рычаг 27 схвата, а вместе с ним качающийся рычаг 33 и поворотный рычаг 30 остаются в плоскости параллелограммных механизмов. Для обеспечения плоскопараллельного перемещения схвата 36 в :пррстранстве s в полярной системе координат с программным углом VM отклонения (фиг.2) от оси Y , необходимо значение угла Ф, отклонения поворотного рычага 30 схвата от плоскости параллелограммов, подаваемое на следящую систему привода 29, формировать как сумму углов р Ч, + р где f - угол отклонения плоскости параллелограммных механизмов от оси у . Величину угла можно определить датчиком углового положения, . установив его на дополнительной шарнирной опоре 6, либо 19 (не показан) При включении привода 29 происходит разворот поворотного рычага 30 схвата вокруг оси 31. При включении привода 32 происходит разворот рычага 33 качания схвата вокруг оси 34.При включении привода 35 происходит разворот схвата 36 вокруг собственной оси. При подаче управляющего взаимодействия на привод вращения поворотной колонны 3 происходит разворот последней относительно основания 1, что приводит к развороту основной системы координат робота на заданный угол.
Формула изобретения
Промышленный робот, содержащий основание, поворотную колонну, несущую механическую руку со схватом и с элементом в виде параллелограм;много механизма, смежные шарниры которого смонтированы на вертикальной и горизонтальной каретках, отличающийся тем, что, с целью упрощения системы управления, увеличения точности и расширения технологических возможностей, он снабжен дополнительным параллелограммным механизмом, на горизонтальной каретке установлена дополнительная каретка, а смежные шарниры параллелограммного механизма руки подсоединены к кареткам посредством дополнительных шарнирных опор, причем к опоре вертикальной каретки шарнирно подсоединено, ведущее звено дополнительного параллелограммного механизма, ведомое звано которого также шарнирно , связано со схватом.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2443032/25-08, 0 кл. В 25 J 11/00, январь 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU1050863A1 |
| Промышленный робот | 1977 |
|
SU837850A1 |
| Промышленный робот | 1978 |
|
SU837852A1 |
| Промышленный робот | 1978 |
|
SU837851A1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| Гибкая производственная система | 1988 |
|
SU1780992A1 |
A
