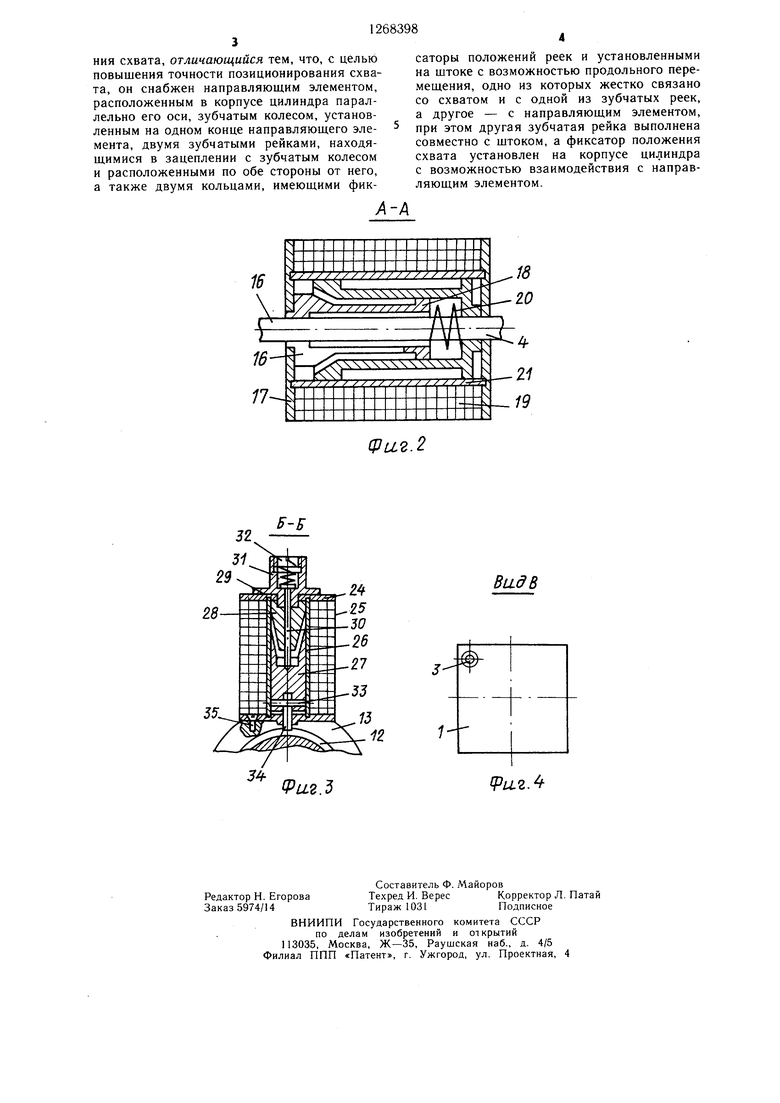
Изобретение относится к области робототехники, преимущественно к системам позиционирования исполнительного органа манипуляторов. Целью изобретения является повышение точности позиционирования схвата за счет исключения влияния инерционности подвижных элементов привода. На фиг. 1 схематично изображен исполнительный орган манипулятора, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 1. Исполнительный орган содержит силовой цилиндр 1 со штоком 2. В корпусе цилиндра выполнено сквозное отверстие 3, где размещен направляющий элемент 4, на котором закреплено с возможностью вращения зубчатое колесо 5, зацепленное с зубчатой рейкой, которая закреплена на штоке 2 (не показана), и с зубчатой рейкой 6, смонтированной на направляющей 7. Рейка 6 посредством скобы 8 жестко связана с кольцом 9, установленным на щтоке 2 с возможностью возвратно-поступательного перемещения. На кольце 9 жестко закреплен фланец 10, к которому крепится, например, схват 11. К направляющему элементу 4 жестко прикреплено кольцо 12, установленное на щтоке 2 с возможностью продольного перемещения. В местах установки колец 9 и 12 на щтоке выполнены кольцевые проточки 13 и 14. Ширина колец превыщает щирину канавок. Направляющий элемент 4 взаимодействует также с фиксатором 15 электромеханического типа, жестко закрепленным на цилиндре 1. Фиксатор 15 содержит расположенные коаксиально направляющему элементу 4 цангу 16, связанную с корпусом катушки 17, выполняющей роль статора, подвижный в осевом направлении якорь 18, катушку 19 электромагнита. Между цангой 16 и якорем 18 установлена пружина 20. Кроме того, якорь 18 своей наружной цилиндрической поверхностью базируется в стакане 21. Внутренняя поверхность цанги 16 выполнена с возможностью взаимодействия с наружной поверхностью направляющего элемента 4. На кольцах 9 и 12 закреплены фиксаторы 22 и 23. Они состоят из корпуса 24 катушки 25 электромагнита, стакана 26, внутри которого смонтированы якорь 27, статор 28 и опора 29 механизма возврата якоря 27. Механизм возврата, помимо опоры 29, жестко связанной с корпусом 24, содержит толкатель 30, установленный соосно фиксатору 22 или 23, один конец которого опирается на якорь 27, а второй - на пружину 31. Свободный конец пружины 31 воздействует на регулировочный винт 32, установленный в опоре 29. К якорю 27 посредством штифта 33 прикреплен палец 34, выполненный с возможностью взаимодействия с проточкой 13 или 14. Фиксаторы 22 и 23 соответственно связаны с кольцами 9 и 12 посредством винтов 35. Исполнительный орган работает следующим образом. В исходном перед началом цикла состоянии катущка 19 цангового фиксатора 15, а также катущки 25 фиксаторов 22 и 23 обесточены. Направляющий элемент 4 расфиксирован и может свободно перемещаться в отверстии 3 корпуса цилиндра 1. Якорь 27 пружиной 31 отжат от статора 28, в результате чего палец 34 каждого из фиксаторов 22 и 23 западает в кольцевые проточки 13 и 14 штока 2. При этом направляющий элемент 4, фланец 10 и рейка 6 жестко связаны со штоком 2. По команде из системы управления (не показана) бесштоковая полость цилиндра 1 соединяется с источником высокого давления. Шток 2 движется слева направо. При необходимости его останова в любой точке отключается подача энергии в бесштоковую полость и подается питание на капушки 19 и 25 электромагнитов фиксаторов 15, 22 и 23. У фиксатора 15 якорь 18 под действием электромагнитных сил движется на цангу 16, сжимая пружину 20, вдоль стакана 21. При воздействии внутреннего корпуса якоря 18 на наружный конус цанги 16 лепестки последней обжимают наружную поверхность направляющего элемента 4 и затормаживают ее. Одновременно с этим якорь 27, сжимая пружину 31, притягивается к статору 28, а палец 34 выходит из зоны взаимодействия с проточками 13 и 14. В этом случае обеспечивается свобода перемещения кольцам 9 и 12 в осевом относительно штока 2 направлении. В процессе продолжающегося инерционного перемещения щтока 2 происходит проворот зубчатого колеса 5, зацепленного с рейкой, закрепленной на штоке. При этом колесо 5 не имеет линейного смещения. Вращение с колеса 5 передается на рейку 6 и последняя линейно перемещается в направлении, противоположном инерционному движению штока 2, компенсируя это движение. Совместно с рейкой 6 относительно щтока 2 движется кольцо 9 с фланцем 10 из-за наличия связи между ними, выполненной в виде скобы 8. Таким образом, инерционные свойства щтока 2 не сказываются на точность позиционирования схвата манипулятора. При возвратном ходе вновь выполняются все подготовительные операции, и при разгоне штока 2 ведомые массы смещаются вдоль него и пальцы 34 западают в проточки 13 и 14. Формула изобретения Исполнительный орган манипулятора, содержащий силовой цилиндр, шток которого связан со схватом, и фиксатор положения схвата, отличающийся тем, что, с целью повышения точности позиционирования схвата, он снабжен направляющим элементом, расположенным в корпусе цилиндра параллельно его оси, зубчатым колесом, установленным на одном конце направляющего элемента, двумя зубчатыми рейками, находящимися в зацеплении с зубчатым колесом и расположенными по обе стороны от него, а также двумя кольцами, имеющими фиксаторы положений реек и установленными на щтоке с возможностью продольного перемещения, одно из которых жестко связано со схватом и с одной из зубчатых реек, а другое - с направляющим элементом, при этом другая зубчатая рейка выполнена совместно с щтоком, а фиксатор положения схвата установлен на корпусе цилиндра с возможностью взаимодействия с направляющим элементом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Захват манипулятора | 1989 |
|
SU1821357A1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| Гидропривод реверсивного механизма | 1983 |
|
SU1101595A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Исполнительный орган манипулятора | 1985 |
|
SU1301684A1 |
| Рука манипулятора | 1984 |
|
SU1247265A1 |
Изобретение относится к области робототехники, преимущественно к системам позиционирования исполнительного органа манипулятора. Целью изобретения является повышение точности позиционирования схвата манипулятора. По команде из системы управления бесштоковая полость цилиндра 1 сообщается с источником высокого давления и щток 2 движется слева направо. Для остановки его в заданной точке отключается бесщтоковая полость цилиндра I и подается питание на катущки электромагнитов фиксаторов 15, 22 и 23. При этом направляющий элемент 4 фиксируется относительно корпуса цилиндра I, а кольца 9 и 12 расфиксируются относительно штока 2. В процессе инерционного перемещения штока 2 происходит поворот зубчатого колеса 5, зацепленного с рейкой, жестко связанной с штоком. Колесо 5 без линейного перемещения перемещает рейку 6 в направлении, противоположном инерционному движению штока 2, совместно с рейкой движется кольцо 12 и схват, жестко связанный с этим кольцом, компенсируя инерционное смещение штока 2. а S 4 ил. tsd Од 00 со ;о 00
(Риг.2
-Б
29
28
fPu.2.5
В Lid В
1fpLLZA
| Исполнительный орган манипулятора | 1979 |
|
SU861060A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
