1
Изобретение относится к маыкно.строению. и может быть использовано в работающих системах..
Известен схват манипулятора, содержащий шарнирно сочлененные с осно-5 ванием пальцы, снабженные приводсмл и выполненные в виде последовательно соединенных элементов 1 .
Недостатком известного схвата является то., что углы поворота между 10 элементами пальца за счет жесткости соединения заранее определены, т.е. конфигурация пальцев схвата не зависит от формы схватываемого объекта, что снижает функциональные возможности |5 схвата.
Цель изобретения - расширение функциональных возможностей.
Поставленная цель достигается тем, что каждый элемент пальца 20 выполнен в виде параллелограммного механизма, наружные шарниры которого снабжены пружинами кручения, а внутренние шарниры - управляемыми цанговыми зажимами.25
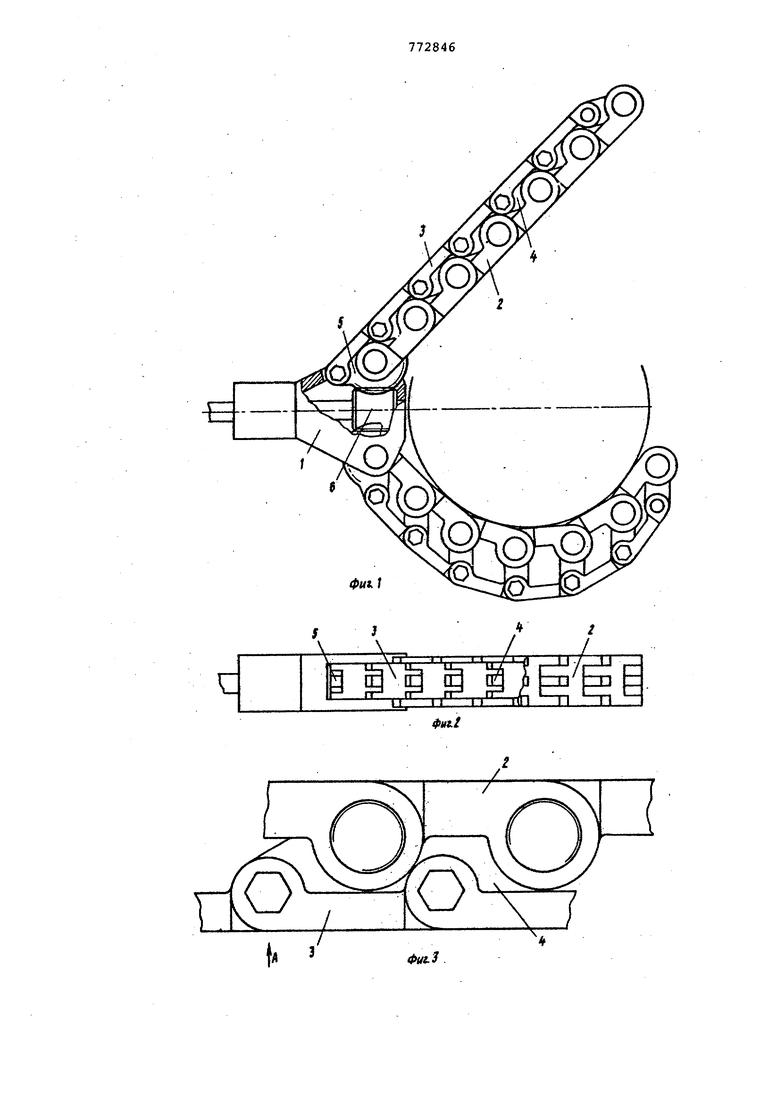
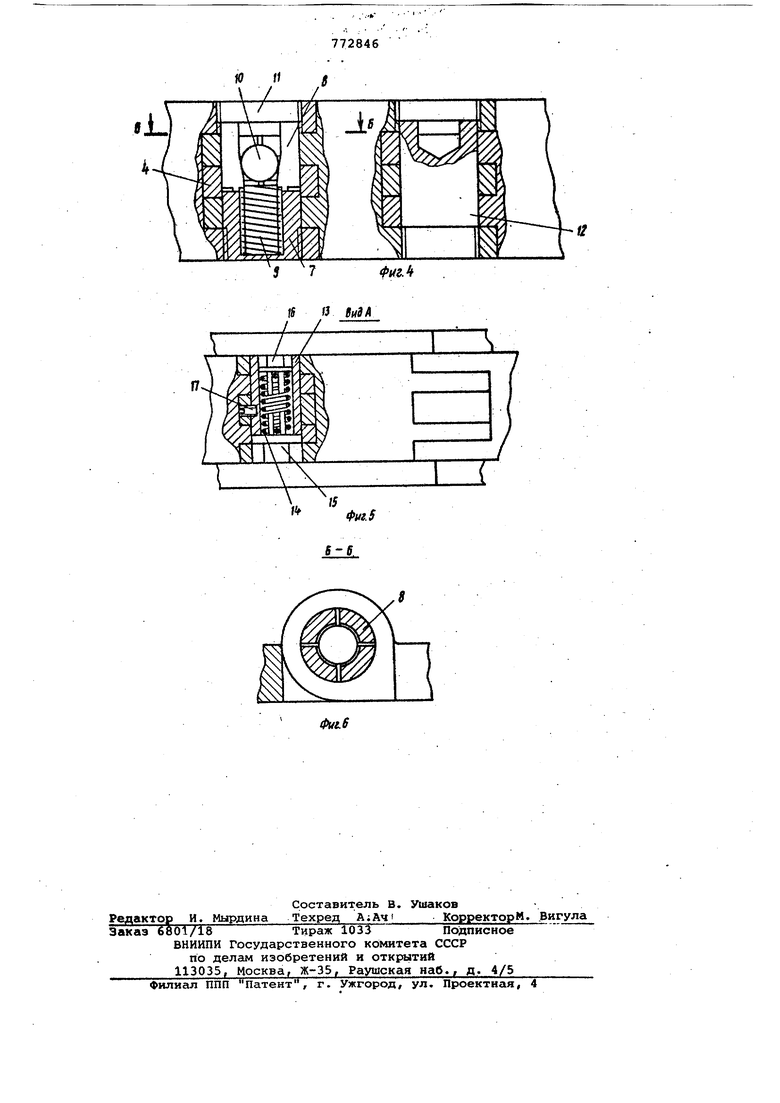
На фиг. 1 схематически изображено устройство, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг.Зфрагмент пгшьца схвата; на фиг. 4.то же, вид сверху (с вырывом по 30
2
внутренним шарнирс1м параллелограмного механизма); на фиг. 5 - вид А на фиг. 3 на фиг. 6 - разрез Б-Б на фиг. 4.
С основанием 1 шарнирно соединё:ны два пальца,из которых один показан в исходном положении, другой - при захвате круглого контура.Пйльцы выполнены в виде последовательно соединенных между собой параллелограммных механизмов, которые состоят из основных звеньев 2, соединительных 3, а смежные звенья 4 параллелограммов каждого пальца параллельны соответствукяцим начальным звеньям 5, которые установлены в основании и приводятся во вращение через зубчатые сектора червяком 6. Паргшлелогрс1ммные механизмы имеют наружные и внутренние шарниры. Во внутренние шарниры, соединяющие основные и смежные звенья 2 и 4,встроены цанговые зажимы, состоящие из корпуса 7, цанговых лепестков 8, электромагнита 9, рабочего тела 10 и крышки 11. При затяжке каждый зажим фиксирует положение двух рядом расположенных звеньев 2 и 4. Таким образом, три цанговых зажима жестко фиксируют- форму всего пальца и йоэтому в нечетных шарнирах звеньев 2 и 4 осью является валик 12. Наружные шарниры звеньев 3 и 4 содержат втулку13, внутри которой находится пружина 14 кручения , посаженная своими концами в прорези выступов вкладышей 15 и 16 с шестигранными головками, винт 17 стопорит втулку 13 относительно звена 4. Натяг пружин 14 кручения в свободном .положении пальца обеспечивает наименьший возможный угол между звеньями 4 и соответствующими звеньями 2, тем самым возвращая пальцам исходную форму. Схват работает следующим образом Червяк б через зубчатый сектор передает вращение начальным звеньям 5, которые поворачивают пальцы из крайних положений. Те из основных звеньев 2 которые коснулись поверх ности схватываемого преда1ета, остан ливаются, но соединенные с ними смежные звенья 4, параллельные вращ адемуся начальному звену, продолжают поворачиваться, обеспечивая движени другнх параллелограммов и их основных звеньев до поверхности предмета. Таким образом, пальцы схвата при нимают форму соответствующую профи - лю . После охвата объекта приводятся в действие цанговые зажимы, использующие тягу электромагнитов 9, и форма пальцев жестко фиксируется. Цанговые зажимы затягивают немного раньше остановки червяка 6, и тем самым обеспечивая необходимую силу трения для удержания предмета. После транспортировки предмета червяк приводится во вращение в другую сторону до крайних положений начальных звеньев, цанги отключаются и пружины кручения возвращают пальцг1М исходную форму. Чтобы пальцы схватывгши вогнутый контур, начальный натяг пружин кручения должен быть больше в тех шарнирах, которые ближе к начальному звену. Для регулировки начгшьного натяга пружин 14 кручения вкладыш 16 утапли вают во внутрь втулки 13 до выхода его головки из шестигранного окна и поворачивания на нужный угол. Формула - изобретения Схват манипулятора, содержащий шарнирно соединенные с основанием пальцы, снабженные приводом и выполненные в виде последовательно соединенных элементов, отличающийся тем, что, с целью расширения функциональных возможностей , каждый элемент пальца выполнен в виде паргиплелограммного механизма, наружные шарниры которого снабжены пружинами кручения, а внутренние шарниры - управляемыми цанговыми зажимс1ми. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 488696, кл. В 25 J 17/02, 1973.
3
.-Л.
с
7i
СП
13
Т1 П
и. „, 1 , U
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1978 |
|
SU715319A1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Палец схвата манипулятора | 1986 |
|
SU1313709A1 |
| Захват | 1972 |
|
SU440249A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Автозагрузчик | 1980 |
|
SU1057269A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Манипулятор | 1980 |
|
SU929430A1 |
И О ttin I /
.
iS Фнг.$
k
S-B
