пользования агрегатно-модульного ПРИН-JQ ординатных сквозных и параллельных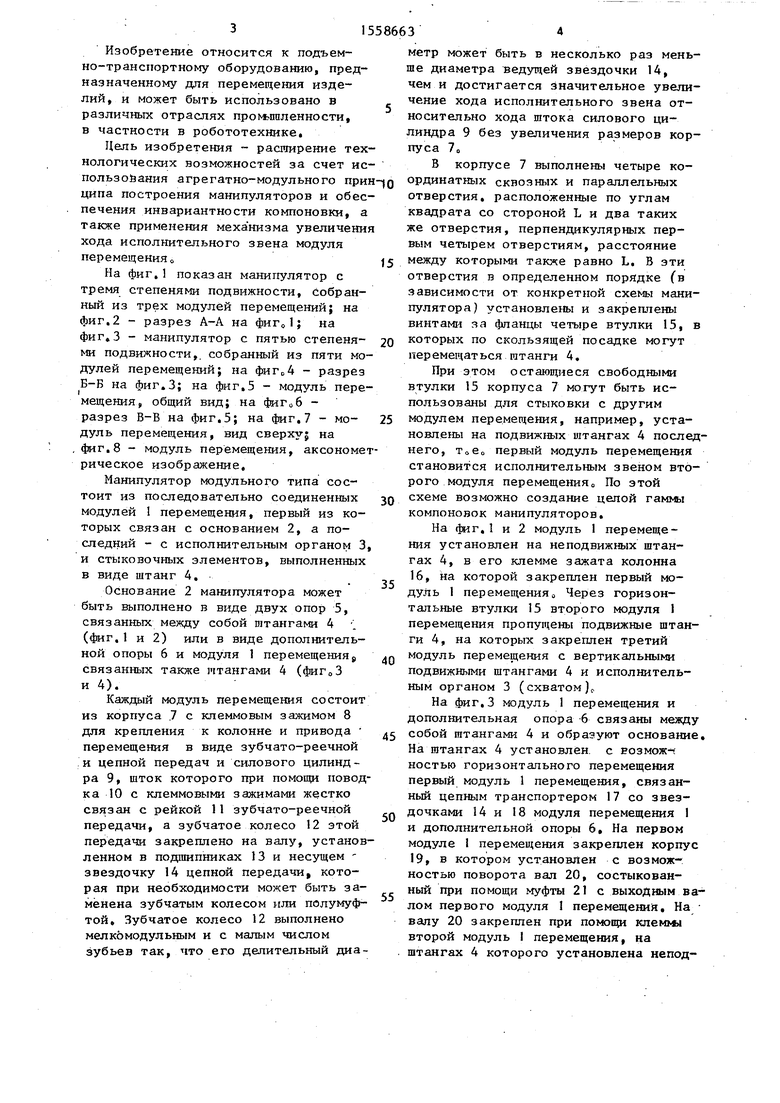

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Способ сборки изделия и устройство для его осуществления | 1991 |
|
SU1791089A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Манипулятор модульного типа | 1983 |
|
SU1252162A1 |
| Автомат контроля параметров тормозной втулки дорожного велосипеда | 1989 |
|
SU1652837A1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Схват промышленного робота | 1988 |
|
SU1583287A2 |


Изобретение относится к подъемному оборудованию, предназначенному для перемещения различных изделий, и может быть использовано в робототехнике. Целью изобретения является расширение технологических возможностей за счет использования агрегатно-модульного принципа построения и обеспечения инвариантности компоновок. Это достигается тем, что в зависимости от технологической задачи может быть собрана конструкция манипулятора из унифицированных деталей, их которых состоит модуль перемещения 1. Каждый из модулей перемещения 1 состоит из привода перемещения в виде силового цилиндра, шток которого связан с рейкой зубчатой передачи и корпуса 7, во взаимно перпендикулярных плоскостях которого выполнены отверстия. Для связи модулей перемещений 1 между собой служат стыковочные элементы в виде штанг 4, расположенных в отверстиях корпусов смежных модулей, при этом корпуса могут быть установлены на штангах как жестко связанными с ними, так и с возможностью перемещений. 8 ил.
ципа построения манипуляторов и обеспечения инвариантности компоновки, а также применения механизма увеличения хода исполнительного звена модуля перемещения о
На фиг,1 показан манипулятор с тремя степенями подвижности, собранный из трех модулей перемещений; на фиг.2 - разрез А-А на фиг01; на фиг,3 - манипулятор с пятью степенями подвижности, собранный из пяти модулей перемещений; на фиг„4 - разрез Б-Б на фиг.З; на фиг,5 - модуль перемещения, общий вид; на фиг06 - разрез В-В на фиг,5; на фиг.7 - модуль перемещения, вид сверху; на фиг,8 - модуль перемещения, аксонометрическое изображение.
Манипулятор модульного типа состоит из последовательно соединенных модулей 1 перемещения, первый из которых связан с основанием 2, а последний - с исполнительным органом 3, и стыковочных элементов, выполненных в виде штанг 4,
Основание 2 манипулятора может быть выполнено в виде двух опор 5, связанных между собой штангами 4 (фиг,1 и 2) или в виде дополнительной опоры 6 и модуля 1 перемещенияs связанных также штангами 4 (фиг03 и 4).
Каждый модуль перемещения состоит из корпуса 7 с клеммовым зажимом 8 для крепления к колонне и привода перемещения в виде зубчато-реечной и цепной передач и силового цилиндра 9, шток которого при помощи поводка 10 с клеммовыми зажимами жестко связан с рейкой 11 зубчато-реечной передачи, а зубчатое колесо 12 этой передачи закреплено на валу, установленном в подшипниках 13 и несущем - звездочку 14 цепной передачи, которая при необходимости может быть заменена зубчатым колесом или полумуфтой. Зубчатое колесо 12 выполнено мел ко модульным и с малым числом зубьев так, что его делительный диа
0
5
0
5
0
5
0
5
отверстия, расположенные по углам квадрата со стороной L и два таких же отверстия, перпендикулярных первым четырем отверстиям, расстояние между которыми также равно L, В эти отверстия в определенном порядке (в зависимости от конкретной схемы манипулятора) установлены и закреплены винтами яа фланцы четыре втулки 15, в которых по скользящей посадке могут перемещаться штанги 4.
При этом остающиеся свободными втулки 15 корпуса 7 могут быть использованы для стыковки с другим модулем перемещения, например, установлены на подвижных штангах 4 последнего, т0е0 первый модуль перемещения становится исполнительным звеном второго модуля перемещения,, По этой схеме возможно создание целой гаммы компоновок манипуляторов.
На фиг.1 и 2 модуль 1 перемещения установлен на неподвижных штангах 4, в его клемме зажата колонна 16, на которой закреплен первый модуль 1 первмещения„ Через горизонтальные втулки 15 второго модуля 1 перемещения пропущены подвижные штанги 4, на которых закреплен третий модуль перемещения с вертикальными подвижными штангами 4 и исполнительным органом 3 (схватом)
На фиг.З модуль 1 перемещения и дополнительная опора 6 связаны между собой гатангами 4 и образуют основание, На штангах 4 установлен с возможностью горизонтального перемещения первый модуль 1 перемещения, связанный цепным транспортером 17 со звездочками 14 и 18 модуля перемещения 1 и дополнительной опоры 6, На первом модуле 1 перемещения закреплен корпус 19, в котором установлен с возможностью поворота вал 20, состыкованный при помощи муфты 21 с выходным валом первого модуля 1 перемещения. На валу 20 закреплен при помощи второй модуль 1 перемещения, на штангах 4 которого установлена неподвижно дополнительная опора 6, а также третий модуль 1 перемещения, имеющий возможность горизонтально персмещатьсяо Цепной транспортер 17 осуществляет связь третьего модуля 1 перемещения со звездочками второго модуля 1 и дополнительной опоры 60 Через вертикальные втулки третьего модуля 1 пропущены штанги 4, на конце которых закреплен четвертый модуль I, На выходном валу четвертого модуля 1 установлен схват 3.
Манипулятор модульного типа работает следующим образом.
Рассмотрим работу одного из модулей 1 перемещений.
При перемещении штока силового цилиндра 9 с помощью поводка 10 перемещается рейка 11, которая поворачивает вал с зубчатым колесом 12 и с установленной на нем ведущей звездочкой 14, Ведущая звездочка 14 протягивает цепь, идущую к исполнительному звену, перемещая его по штангам 4, которые могут устанавливаться во втулках 15 как параллельно оси силового цилиндра 9, так и перпендикулярно ей, чем и достигается инвариантность компоновки исполнительных и силовых элементево
Манипуляторы, составленные из нескольких модулей 1 перемещений, работают следующим обраэомо
На фиг,1 и 2 первый модуль 1, приводимый собственным силовым цилиндром, перемещается на втулках 15 по неподвижным штангам 4 основания, транспортируя закрепленный на колонне 16 второй модуль 1, который своим силовым цилиндром 9 перемещает горизонтально, штанги 4 с закрепленным на них третьим модулем 1, который в свою очередь перемещает вертикально штанги 4 со схватом 30
На фиг„3 и 4 показаны возможные варианты использования приводных модулей для поворота (ротации ) исполнительных звеньев, а также использование модуля в качестве привода цепного транспортера. Так, цепной транспортер 17, связывающий звездочки моду
ля 1 и дополнительной опоры 6 (установленной на штангах 4 модуля 1 )t перемещает первый модуль 1 на горизонтальных втулках по штангам 4 осно- ванияс, Привод первого модуля 1 используется для поворота вертикального вала 20, установленного в подшипниках в корпусе 19, с закреплен.Q ным на нем вторым модулем 10 Второй модуль 1, звездочка которого связана со звездочкой дополнительной опоры 6 цепным транспортером 17, перемещает с помощью последнего горизонтально
., по штангам 4 третий модуль , который в свою очередь перемещает вертикально закрепленный на штангах 4 четвертый модуль 1, Этот последний модуль 1 используется как привод рота20 ции закрепленного на его выходном валу ( вместо звездочки ) схвата 3„
Формула изобретения
25 Манипулятор модульного типа, содержащий последовательно соединенные модули перемещений, первый из которых связан с основанием, а последний - с захватом, причем каждый из модулей
до включается в себя корпус и привод перемещения, и стыковочные элементы, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения инвариантности компоновок, в корпусе каждого модуля перемещения во взаимно перпендикулярных плоскостях вьщолне- 1НЫ отверстия, а стыковочные элементы выполнены в виде штанг, установлен4Q ных в отверстиях корпусов смежных
модулей посредством введенных втулок, причем корпус одного из смежных модулей перемещений жестко связан штангами, а корпус другого модуля педе ремещений установлен с возможностью перемещения вдоль этих штанг, при этом привод перемещения каждого модуля выполнен в виде зубчато-реечной передачи и силового цилиндра, корпус которо50 -го смонтирован на корпусе модуля, а шток жестко связан с рейкой зубчато- реечной передачио
35
Г
/
f
1
t
J Л
р
в
/
Фие.1
А
л-л
z
Е-d
ii /а„
,/
.да
0tfe.2
7
У
Фие.д
Ч 17 1
Фие.Ь
1Кв
М
Фие.5
Фие.7
Составитель А„Ширяева Редактор С.Патрушева ТехредМ.Дидык Корректор М.Шарогаи
Заказ 804
Тираж 688
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Подписное
| Манипулятор модульного типа | 1977 |
|
SU763082A1 |
