(54) КАККПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU891425A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Транспортно-тяговое средство | 1989 |
|
SU1671483A1 |
| Манипулятор | 1970 |
|
SU334777A1 |
| Манипулятор | 1984 |
|
SU1240581A2 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Манипулятор | 1982 |
|
SU1013260A1 |

Изобретение относится к робототехнике и может быть использовано для автоматизации основных и вспомогательных операций в промыиитечнос ти, а также в роботах специалького назначения,
Известен манипулятор, содери шций механическую руку, с шарнирно соединенными звеньями, кинематически связанными посредством конических передач/ и силовой блок l .,
В указанном манипуляторе каждое звено г ехаиической руки имеет индив}щуальную кинематическую связь с соответстсующим двигателем, ко- тораяпроходит через все предыдущие звенья и шарниры руки. Это усложняет конструкцию .и ограничивает увеличение числа степеней подзиж- . ности манипулятора. Силовой Олок, содержащий дифференцигшьные механизма для компенсап,пи взаимного влиИиИЯ tit4«tUiOiS и ио;и ШЙТЙО JJHtffOTejлей равное числу степеней подвижности механической руки, также имвGT сложную конструкцию.
Углы поворота мекуау звеньями но-ханкческоП руки из-за кинематичес-. ких связей на могут иметь келмчину
более SO, что ограничивает область манипулироззапия.
Цель изобретения - упрощение конструкции манипулятора и увеличений област-f манипулирования.
Указанная цель достигается тем, что манипулятор снабжен, по числу шарниров, дифференциалами, дополнительными коничес:а;м}Г псредачй -С и злектромг31гнитны.м .1уфтами, при чемсателлиты дифференциала ка/кдого предыдущего звена механической руки кинематически связаны с солнечным колесом дифференцисша послсЛуюгцего звена, водило каж,дого дифференциала кинематически связано с соответствугаг ей сЛ дополнительной конической передачей этого u:ap.нира, а электромагнитные муфти установлены на осях соосних конических колес дополнительной конической передачи ка гуюго шарнира н , Yo еилопой блок солоржит нереверсивный электродпигатоль, причем его .вал соединен с солнечным колесом первого дифференциала, а также тем, что корпус элсктромагиит,кой куфты выполнен с виде цангог о.гЬ зажима.
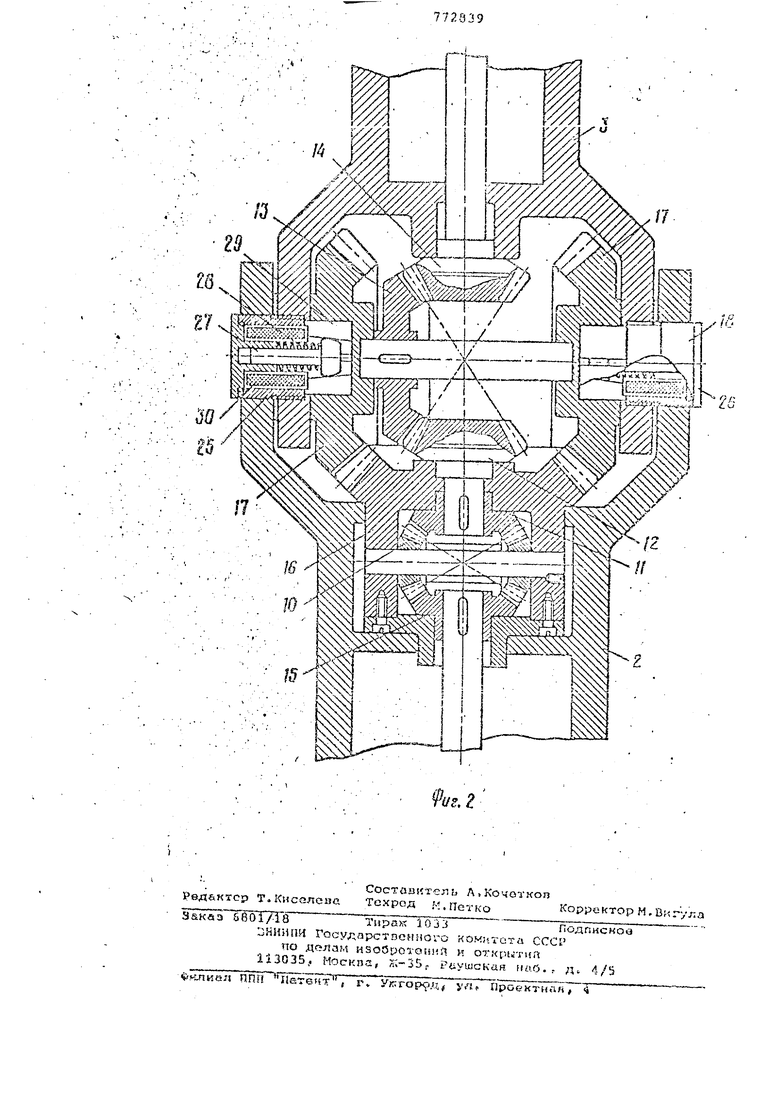
На фиг. 1 нзображона кинематИ еская схема мпиипуляторп) мп фиг.2 оказан один из ишрмироц рук с устоПстпом злоктромагиитних цаигоиых сохимоп, рпзроо.
с оснонаниом 1 млиипулптпрп пол,- пижио сосди1 О 1Д лохаиичссКпл рука, состоятпп из ыариирио соединенных аиоиьои 2-0 и схийта 9. Звенья 3, 4, 5 II 7 родипль 0 иращатьс локруг осоП соотвотстпукяцик шарнн
pOD, Д ЭВОПЬЛ 2f G и 8 - ИОКРУГ СОбстяенпых осоП,
Сателлиты 10 дифференциала кзл;дого прол длу1иого эпона пходят н эацо. плсиио с колосом 11, которое для: nucMibon 3/ 4, 5 и 7 чйреэ зубчатые колеса 12-14 кинематически слязаио с колосом 15 дифференциала , следующего а попа. Дли звсиьоп 2, И и 8 колесо 11 жестко сиязано с налом солнечного колесе. слоду «пого диффореицигио.
Водило 16 и дифференциалах рсхциальмого DpaiiteHHH звеиьсп приводит о . движение дпа сооспых конических колоса 17, которые Могут быть.эафикси- рованы жестко соединенными с послгэдующим эвеном цаигопыми эяектромагниа-ными .зажимами 18. В дифференциалах осевого диижения звеньев колесо19 и водило 16 иходят п задаетемио с колесом 20 и могут вращаться п противоположные стороны, а также фиксироваться относительно последующего анена путем фикслцип цанговыми .имами 10.шестерен ,21.,
Червячный вал схватг .9 приводится но вращение одним из соосных конических колес 22f которые фиксируются относительно вала также цангоуыми зажимами, 18.
Силовой блок манипулятора состоит из расположенного в основании 1 электродвигателя 23, вал которого через редуктор и электромаг итнуго муфту 24 соединен с солнечным коле- сом 15 первого дифференциала
Электромагнитный цанговый зажим 18 состоит из корпуса 25 и крышки 26, Стержень 27 под действием пружины 28 может разжимать цанговые лепестки 29, Под действием катушки 30 электромагнита стержень 27 совершает обратный код.
Манипулятор работает следующим образом.
Для реализации какой-либо одной степени подвижности манипулятора вращение от пола электродвигателя 23 передается через солнечные тсолсса 15, сателлиты 10 и колеса 11 всех пред1 щу(дих дифференциалов на водило 16 дифференциала движущегося звена. ДБИжсиие этого гэяена в ту «ли другую сторону согчергиаотся пмосТе с одним из протипоположно BpeunaK uvixc coocHiJx НОНИЧГ5СКИХ колос-17, icorojion о«гл тси ххестко с низ лит JM ч«,)
cnofS зажптып цангопый злжим IS с riepoMGiMacMiJM э но ном. (Ipii протипоположноо соосноо коничоскоп колоСО 17 свободно npajjiaciTcJi на споом цанговом зажиме 10, электромагнит кС7орого iJioii)4uH с максимальмоП Ciiлрй; что обоопочииасгг вгпгипаниа стержня 27 и сжатие цангоиг Х /голасГ ков 29. Для остановки движумсгося звена я нужном положо 1ии электромагнит отк.ночают, стержень ,27 под дейстоием пружины 2В разжимает цангоцыо лепестки 29 и происходит фиксация свободно npajuai«iterocn соосиого конического 1солеса 17, вместо с которым сопсригается торможение и остановка :jBe(a.
OCGBOO вращение звеньев 2, б и 6 в ту или другую сторону происходит вместе и;п1 с содилом 16 или с колесом 19, ггри этом одно из них
0 рстаетсР жестко CBHL.UHUUM через сво;о шестерню 21 и зажатый цанговый зажим- 18 с движущимся звеном, освобож дение зажимом, шестерни 21 второго (соответственно или колеса 19 или водила 1G) позволяет ему свободно вра 11аться относительно этого звена. Торможение и оста-: новка совершается также путем . фиксации шестерни 21 соответственно колеса 19 или водила 16. При любых
D перемещениях звеньев напрлуленио вра)дения вала электродвигателя 23 не меняется.
Предлагаемая схема манипуляторл позволяет также реал 13онать перо5MeiJiCHHe механической руки одновроменно по неско;гьким степеням подвижности. Для этого необходимо таким образом управлять тормозными моментами D цанговых зажимах, чтобы в дифференциалах перемещаег гх
0 звеньев, последую лие звенья которых также Движутся, происходило одновро(менное враиюнле как водила 16, так и зубчатого колеса 11, при этом позможко и управление скоростью движе5ния звеньев.
Движение в и;арнирах промежуточного звена 4 осуществляется синЭто
хронно от одного ьодила
увеличивает область манипулирования, так как угол между звеньями 3 и 5 можот иметь любую требуемую величину.
Предлагаемая конструкция манипуляторЛ погзволиет осуществлять все движения механической руки, в том числе и движения схвата от одного электродвигателя, который при этом остается иереверсиппим. Манипулятор, особенно СИЛОВОЙ блок, имеет . поэтому более простую конструкцию. Упрощается управление дипжсниями мехйгшческой ру)си, осугцсствлисмоо путем управления тормо; иыми момонтими UftHfOTii.ix и1Ж11мо|1, мг х 1И11чосК-:( рук/ сохран(гот неГюлг.шис габариты с уполичоннам числа ствпогюй подвижиости.. . , Наличио внутри каждох о зкона только одного BiWa, киномлтичоски. сппзыпа1о(11его солиоиныо коллпл nt«Ti o РОИЦИШЮП и Cc:v liOCTI. HGOX ДВН МОХаИНПОСКОЛ руки от 11срО1чорсипиого элоктродвигатоляр да цозможность выполнить шарниры руки с ,Ц11ф оре11циаламп п видо отдельных модулоП, быстро и легко собирать ме ханическую руку с любым числом OTQпеной подпижности, D зависимости от условий работы маиипулпгтора, так как при такой сборке силовой блок и все прсдь1ду1ДИв от места стыка звень руки остаются неизменными. Манипулятор может быть испольаопан как в копирующем, так н в автоматическом режимо работы. Формула изобретения Манипулятор, содержахций маханическую руку с шарнирно соединенными звеньями, кинематически связанными посредством конических передач и силовой блок, отличаю щи с я тем, что, с целью упрощения конструкции и увеличения области манипулиропаг1ин, он снабжои, по числу ыарнироо, диффероггциалами, дополнительными коиичоскнми прродлчами и э/ ектромогнитиыми муфтами, r:p;;;c;-i :,«лиллиль днффоронлколо кг.--дого г род1лду(цсго эпоиа моханичоско; руки кииоматячоскч сичэани с сс/пю ным колосом дифференциала послс;;у-ющсгс эвена, водиию ко-кдого лиФСОреяциола кинематически спязаио с соотюотстпующоП дополкительмоП конической передачоп шарнира, а электромгггннтные устаноологи i;a осях сооснык конических колес ;;ополнительной конической перодачи каж,до1О шарнира. 2.Манипулятор по п. 1, о т л ич а ю щ и и с я том, что снлопоп блок содержит нереперсиБНыП элоктродвигатель, причем его naji соолнися с солнечным колесом первого дифференциала. 3,Манипулятор по п. 1, о т л гчающийся тем, что, корпус электромагнитной выполнен в виде цангового зл/кима. Источники информации, принятые во внимание при эксперт:5зс 1. Авторское снидетельстпо СССР 536955, кл. В 25 J 1/00, 1976.
n Iv-d .. )i4 C
o Kfrit- L-2L/l%./5
5 :biP f
I i
.
i J
n
l3
)
3
П П
Id.йЬ--Tf
:2E ... Е7 . a-ftff.
