(54) ТРАВЕРСА ТРУБОУКЛ АД ОЧНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегат для выполнения комплекса работ по устройству бордюров автодорог | 2021 |
|
RU2777314C1 |
| Машина для посадки на площадках склонов | 1985 |
|
SU1242014A1 |
| Подъемное устройство для труб | 1982 |
|
SU1167139A1 |
| Контейнерный бункер-поезд | 1988 |
|
SU1518548A1 |
| Проходческий взрывонавалочный комплекс | 2018 |
|
RU2700388C1 |
| Устройство для поддержания прямолинейности фронта струговой механизированной крепи | 1990 |
|
SU1754897A1 |
| Грузоподъемная траверса | 1987 |
|
SU1470644A1 |
| Землеройно-метательная машина "газон-1 | 1983 |
|
SU1106762A1 |
| Червячный пресс для переработкипОлиМЕРНыХ МАТЕРиАлОВ | 1979 |
|
SU846291A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ МОЙКИ ИЗДЕЛИЙ | 1992 |
|
RU2008988C1 |
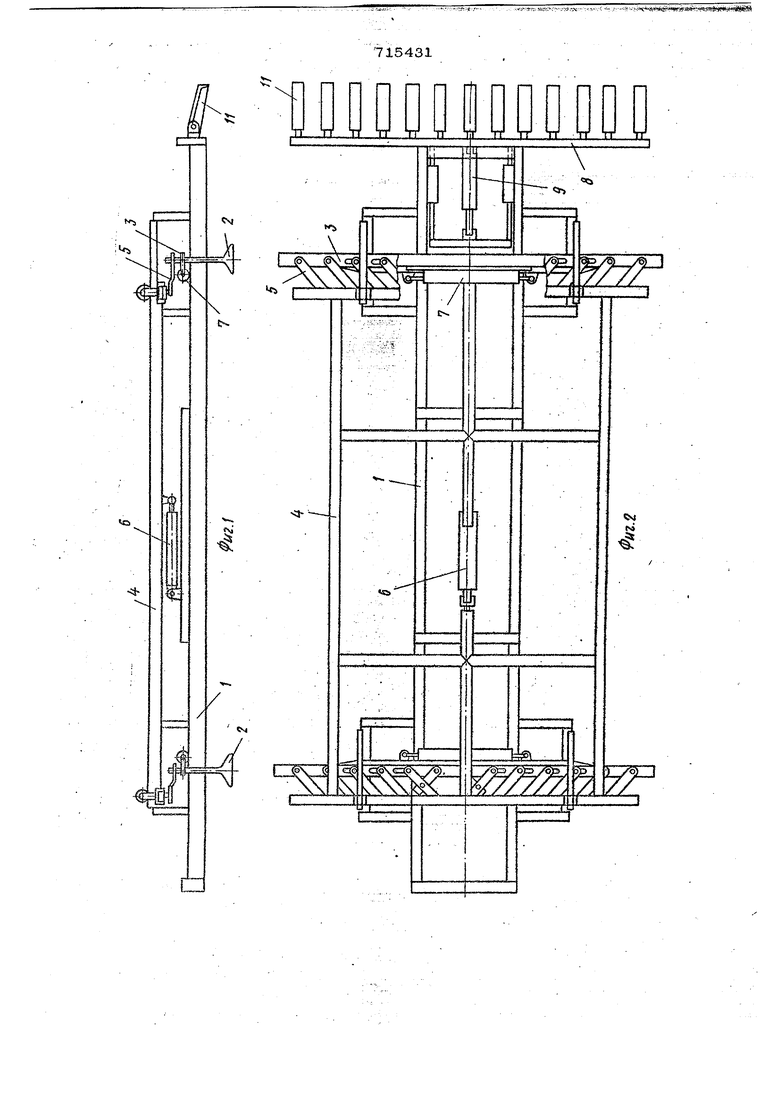
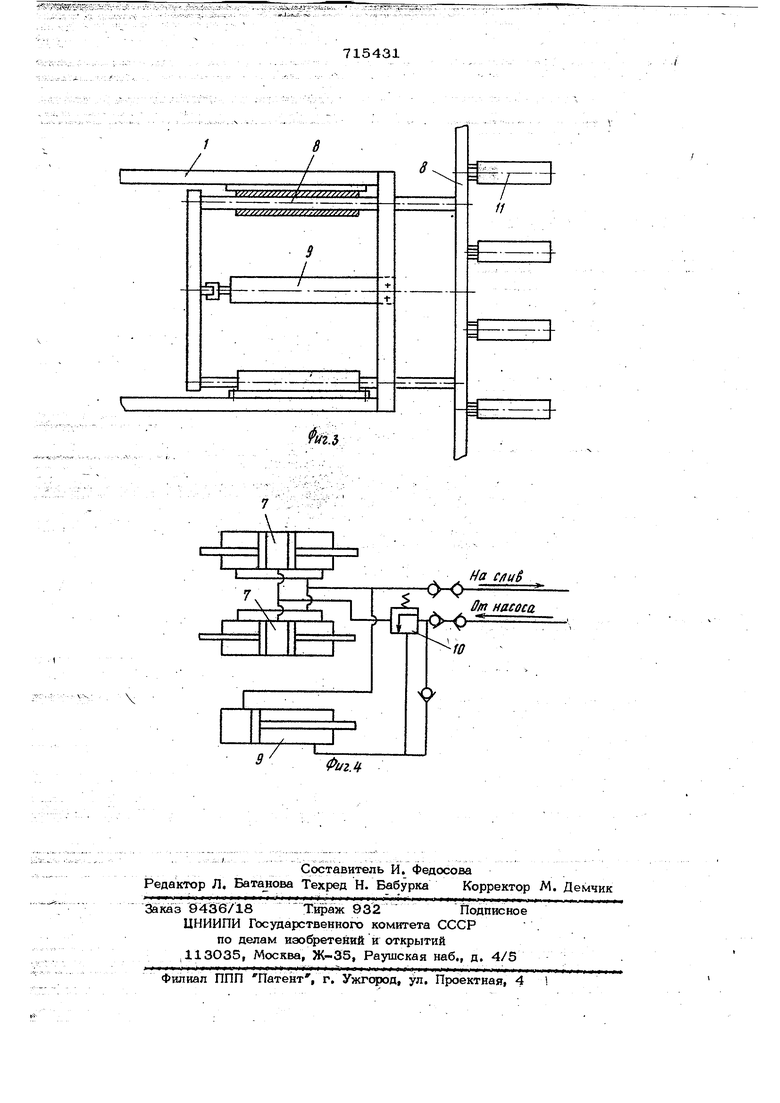
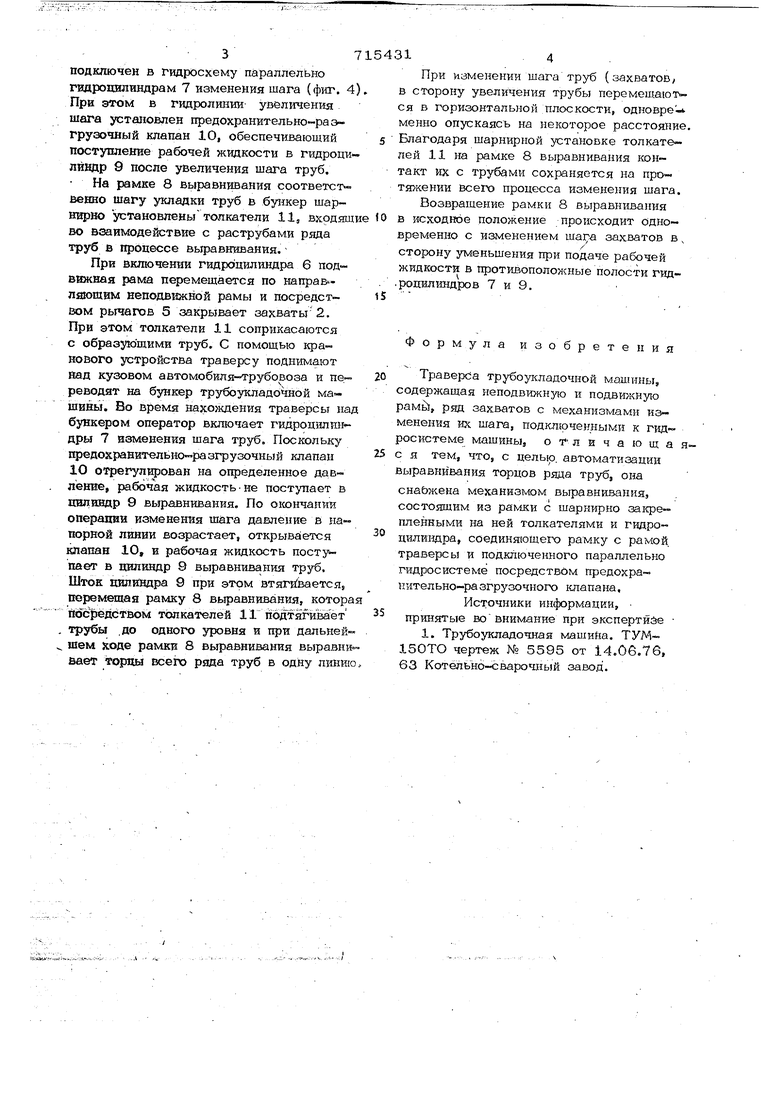
Изобретение относится к грузовым траверсам, а именно к траверсам для труб, применяемым для перегрузки и укладки труб на трубоукладочных маши- нах. Известна траверса трубоукладочной машины, содержащая неподвижную и под вижную рамы, ряд захватов с механизмами изменения их шага, подключенными ic гидросистеме машины ij . Недостатком этой траверсы является то, что торцы труб выравнивают вручную Целью изобретения является автоматизация выравнивания торцов ряда труб. Цель достигается тем, что предлагаем мая траверса снабжена механизмом вйравнивания, состояшим из рамки с щарннирно закрепленными на ней толкателями и гидроцилиндра, соединяющего рамку с рамой траверсы и подключенного параллельно гидросистеме посредством предозь- ранительно-разгрузочного клапана. На фиг. 1 изображена описываемая траверса, вид сбоку; на фиг. 2 - то же,, план; на фиг. 3 - рамка выравнивания в выдвинутом положении; на фиг. 4 - гидравлическая схема траверсы. Предлагаемая траверса (фиг. 1, 2) включает неподвижную (несущую) раму 1, на которой установлены поворотные захваты 2 для труб с механизмом 3 изменения их шага, и подвижнуто раму 4, Подвижная рама 4 установлена на направляющих неподвижной рамы 1 и посредством рычагов 5 связана с механизмом 3 иэменения шага. Подвижная рама 4 приводится b движение посредством гидроц№линдра 6, а механизм изменения шага - гидроцилиндром 7. Управление гидроцилиндрами осуществляется оператором с пульта управления трубоукладочной машины (на чертежах не показан). На неподвижной раме 1 посредством опорных роликов установлена рамка 8 выравнивания, к которой прикреплен гидроцилиндр 9, вторым своим концом закрепленный на Неподвижной раме 1. Гид- роцилшадр 9 выравнивания торцов труб подключен в гидросхему параллельно гидро1шлиндрам 7 изменения шага (фиг. 4 При этом в гидролинии- увеличения шага установлен предохранительно-раа грузочный клапан 10, обеспечивающий поступление рабочей жидкости в гидроци лййдр 9 после увеличения шага труб. На рамке 8 выравнивания соответственно шагу укладки труб в бункер шарнирво установлены толкатели llj входящ во взаимодействие с раструбами рада труб в процессе выравнивания. При включении гидроцилиндра 6 подвижная рама перемещается по направляйошим неподвижной рамы и посредством рычагов 5 закрывает захваты 2. При этом толкатели 11 соприкасаются с образующими труб. С помощью кра нового устройства траверсу поднима.ют Над кузовом автомобкля-трубовоза и переводят на бункер трубоукладочной машины. Во время наховдения траверсы на бункером оператор включает гидроцштиндры 7 изменения щага труб. Поскольку предохранительно-разгрузочный клапан 10 отрегулирован на определенное давление, рабочая жидкостьне поступает в цилиндр 9 выравнивания. По О1юнчании операции изменения шага давление в напорной линии возрастает, открывается клапан 10, и рабочая жидкость поступает в цилиндр 9 выравнивания труб. Шток дилийдра 9 при этом втяги4зается8 пегюмещая рамку 8 выравнивания, котор йбс ёдством толкателей 11 подтягивает . трубы .до одного уровня и при дальней шем рамки 8 выравнивания выравнй вает торды всего ряда труб в одну пини При изменении шага труб (захватов/ в сторону увеличения трубы перемещают-. ся в горизонтальной плоскости, одновре- менно опускаясь на некоторое расстояние. Благодаря шарнирной установке толкателей 11 на рамке 8 выравнивания контакт их с трубами сохраняется на про тяжеНИИ Всего процесса изменения шага. Возвращение рамки 8 выравнивания в исходное положение происходит одновременно с изменением щагра захватов в, сторону уменьщения при подаче рабочей жидкости в противоположные полости гвд.родилиндров 7 и 9. Формула изобретения Траверса трубоукладочной машины, содержащая HenonaroKHjTO и подвижную рамь, РЯД захватов с механизмами из менения их щага, подк.пюченными к гидросистеме машины, о т- л и ч а ю щ а яс я тем, что, с целью автоматизации выравнивания торцов ряда труб, она снабжена механизмом выравнивания, состоящим из с щарнирно :и1фе«пленными на ней толкателями и гидродиливдра, соединяющего рамку с рамой, траверсы и подключенного параллельно гвдросистеме посредством предохранительно-разгрузочного 1шапана, Источники информации, принятые во внимание при экспертизе 1. Трубоукладочная мащийа. ТУМ 150ТО чертеж № 5595 от 14.06.76, 63 Котельн6- ;варощ1ый завац.
тг тт тт
тт тт тг тг тт
«
V
J--to
CS4
«N
3
ZIIM
ш
в
715431
