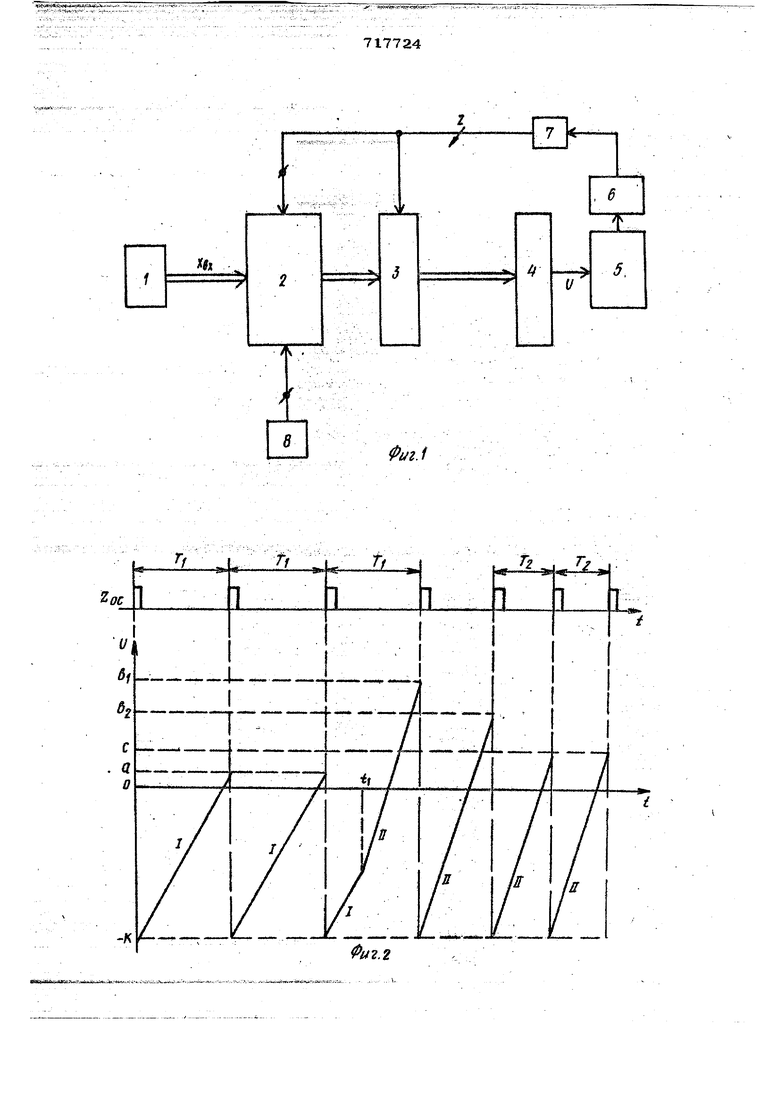
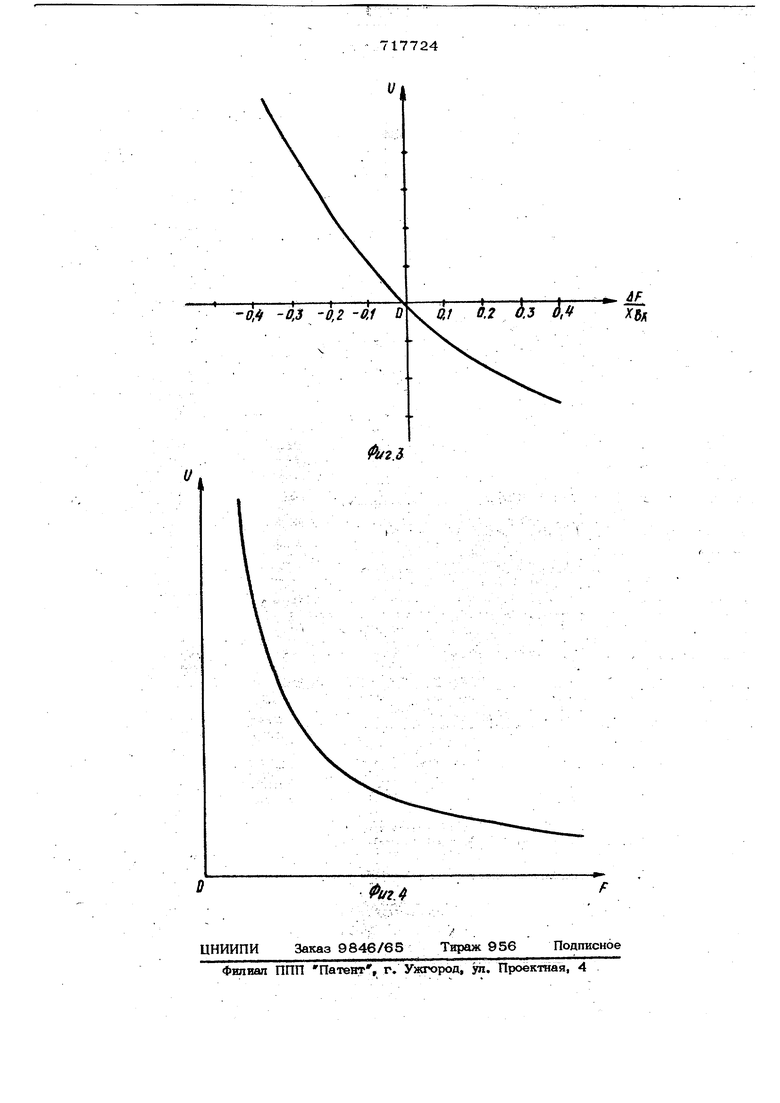
I. Предлагаемое изобретение отйоситсй к области дискретных электронных сйб , тем управления ,и цифровых регуляторо1з, оно может быть использовано.Мчастнорти при построении регулятора частоты вра- . щения электродвигателя. Известны цифровые следящие системы, .содержащие задающее устройство, устройчзтво сравнения, вычистительное устрой.ство, исполнительный механизм, выход которого соединен с регулирующими органами объекта регулирования, положение Которого контролируется датчиком, выход tcoToporo соединен со вторым входом устЬрйства сравнетя I . В качестве сравнивающих устройств систем такого рода нашли широкое применение цифровые сумматоры-аакопитеяи J2 к предлагаемой, наиболее близкой по технической с днности является; цифровая следящая система, содержащая последовательно соединенные преобразователь коднапряжение, исполнительный электропривод датчик обратной связи, йреобразователь напряжение-код и цифровой сумматор-накопитель, второй вход которого соединен с выходом задайядёт: о устройства СЗ. ; Недостатком данной системы является ее низкое быстродействие. Целью настоящех о изобретения является повыЩение быстродействия системы. Поставленная цель достигается тем. ч-Л в системеустановлеиы генератор стробирующих ймпульссв и буферное запоминаю шее устройство, первый вход которого соединен с вькодом цифрового сумматора накопителя, второй вход с выходом преобразовате; я напряжение-код, в выход со входом преобразователя код-гнапряжеиие выход генератора стробирукндих импульсов соединен с третьим входом цифрового сумматора-накопителя. Блок-схема системы представлена на фиг. 1; на фиг. 2 приведен график зависимости результата интегрирования От времени и изменения величины периода свгнапа датчика обратнод связи; на фиг.З . график зав-исимости результата интегрирования от величины относительного рассогласования между регулируемым параметром и входным сигналом; на фиг.4 график зависимости результата инте грирования от действующего значения регулируемого параметра при постоянной величине рассогласования межДу регули руемым параметром и входным сигналом Приняты следующиеобозначения: задающее устройство - 1; цифровой сумматорнакопитель - 2; буферное запоминающее устройство - - )3; преобразователь коднапряжение - 4; электропривод - 5j да -чик обратной связи - 6; Преобразователь напряжение-код - 7; генератор стробирую щих импульсов 8; Xg - сигнал задания 2 - сигнал обратной связи; F - частота вращения электропривода; U - управляющее воздействие, результат интегрирова ния в цифровом cyMMBTOpe-HdKonwTene 2; 2 периоды сигнала датчика обратной связи 6 при частотах вращения электропривода 5 F и Fg } А, В - зависимости нарастания интеграла при К и а&ч 3 Ь ,. С -результат интегрированИя соответственно при установив- , .шейся частоте F-J , переходном процессе и при установившейся частоте Fj; 1 момент времени, в который произошла смена величины входного сигнала. Система работает следующим образом Генератор стробирующих импульсов 8 вырабатывает импульсы с частотой f . При подаче каждого стробирующего импульса на. ВХОД: цифрового сумматора-накопителя 2 и - разрядное число Хц с выхода задающего устройства 1 суммируетря с содержимым цифрового сумматора-накопителя 2. Таким образом при непрерывной работе генератора стробирую щих импульсов в цифровом сумйЭТоре-На копитёле 2 образуется-сумма числовых значений входного сигнала: где - количество стробов-импульсов (тактов); К - начальное число в цифровом сум маторе-накопителе 2; I - номер строба. Эта сумма является дискретной реали зацией интеграла входного сигнала. При значении Xg сумма будет постоянном равна При вращении электропривода 5 датчи обратной связи 6 вырабатывает сигнал. 7 4 оторый с помощью преобразователя наряжение-код 7 преобразуется в импульы, частота которых f пропорциональна астоте вращения - де F - частота вращения электропривоAj- постоянный коэффициент, определяемый техническими данными ; датчика обратной связи б и преобразователя йап13яжение-код 7.J .. (При использовании в качестве датчика братной связи б датчика с вьЬсодным игналом в виде унитарного сигнала пребразователь напряжение-код 7 может ыть исключен из системы). Величина периода следования этих мпульсов Л 4 , : -, .:. . ;;....:; Эти импульсы несут информацию о по-ожении электропривода и поступают на. входы цифрового сумматора-накопителя 2 и буферного запоминающег,о устройства 3s причем каждый импульс считывает в па- мять буферного зацоминающего устройства 3 с выхода цифрового сумматора-накопителя 2 резул.ьтаты интегрирования и стирает результат интегрирования в цифровом сумматоре-накопителе 2, устанавливая его содержимое в начальное состойние (число К). Таким образом получается, что с буферного запоминающего устройства 3 на электропривод S .поступает управляющее воздействие О, равное результату интегрирования в предыдущем цикле, при этом время интегрирования равно Т, т.е. длительности сигнала с датчика обратной связи 6. Количество тактов интегриро- .вания при этом будет равно Т - длительность сигнала с датчика обратной связи 6; {.,-.частота генератора стробирующих :иМпульсов 8. Результат интегрирования при посТоян в цифровом сумматоре-накопй«ч 2 будет равен ,Число К подобрано так, что, если длительность периода сигнала с датчика обратной, связи соответствует X у. , т.е. частота вращения электропривода соответ-. ствует входному сигналу, то результат интегрирования равен нулю. Исходным условием для подбора.числа К является то, что произведение X Т при соответствии значения регулируемого пара,м.етра входному сигналу для всех X е,х. является постоянной величиной, определяем техническими характеристи1сами в пбрвуЮ . |Очередь датчика обратной связи 6. Одновременно вследствие того, что Хьх- Т i К , число К зависит не только от параметров датчика обратной связи 9, но и от частоты генератора стробирующих импульсов 8 При переменном значении резуль тат интегрирования будет равен .-где Xg)среднее значение Х на вреМенйом интервале Т. Таким образом, в данном случае сигйал Х, интегрируют,с,помощью цифрово го сумматора-накопителя 2, а затем через буферное запоминающее устройство 3 подают на вход электропривода 5, причем время интегрирования определяется периодом следования импульсов с выхода преобразователя напряжение-код 7. Как видно из фиг, 2,в установившемся режиме работы, когда числовое значение, входного сигнала . соответствует требуемому значению регулируемого параметра (в данном случае частоте вращения электропривода 5 F;|) результат интегрирования.близок к нулю и отличается от него на. величину установившейся ошибки 6J , являющейся управляющим воздействием. В момент времени Ц происходит смена. . числового значения входного сигнала на . - Вследствие этого числовая величина входного сигнала Х, не со- ответствует в этот момент времени частоте вращения электропривода F и результат интегрирования (управляющее воздействие) после момента времени t .меняется. Изменение управляющего воздействия и вызывает изменение частоты вращения электродвигателя в сторону приведения в соответствие величины периода сигнала датчика обратной связи 6 с .входным сигнал.ом ив момент, когда, частота вращения Fg станет соответствовать результат интегрирования будет равен С. Из графика на фиг. 3 видно, что в . пределах 1О% зоны относительного рассогласования величина управляющего воздействия tui зависит практически линейно; от величины относительного рассогласбва7246 ния входного сигнала и регулируемого параметра объекта управления PV- Bx-// При работе системы интегрирование входного сигнала усредняет его мгновенные чисповые значения, при этом в{:емя усреднения равно периоду сигнала датчика обратной связи, т.,е. зависит от действующего значения регулируемого параметра, в результате чего осуществляется функция ада птивного фильтра входного сигнала. Это интегрирование не ухудшает частотных характеристик обратной связи, так как полвъШ цикл интегрирования осуществляется внутри временного интервала дискретизации сигнала обратной связи. Из графика на фиг. 4. видно, что зависимость и (F) носит гиперболичес- кий ..характер вида - .и .что система адаптивными свойствами, поскольку величина управляющего воздействия формируется пропорционально относительн;ой, а не абсопйт хой величине ошибки регулирования, что позволяет повысить точность цифровой следящей системы, особен - но в областях Ьбработки малых сигналов. Формула изобретения Цифровая след-ящая система, содержащан последовательно соединенные п реобразователь код-напряжение, исполнительнь1й электропривод, датчик обратной связи, преобразователь ..напряжение-код и цифровой сумматор-накопитель, второй вход к-оторого соединен с выхоДом задакадего устройства, отличающаяся тем, что, с. целью повышения быстродействия, в ней установлены генератор стробируюндих импульсови буферное запоминающее устройство, первый вход которого соединен с выходом цифрового сумматоранакопителя, второй вход - с выходом преобразователя напряжение-ко.ц, а выход - со входом преобразователя код-напряжение, выход генератора стробирующих импульсов соединен с третьим входом цифрового.cys матора-накопителя.. Источники информации, принятые во внимание при экспертизе 1.Йр5т: Е. Е,. и др. Цифрозью .регулйторы.М., .Энергия, 1966, с. 7-46, 2. JKapnoB Р.. Г.-.Техника частотноимпульсного моделирования. М., Машино- строение; 1969, с. 62, 94-97. . Айзерман М. А., .Теория автоматичесЕГого регулирования. М., Наука , 1966, с. 46-53 (прототип).
Г
J
г
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Электрогидравлическая следящая система стенда | 1985 |
|
SU1272820A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Статистический анализатор конечной разности фазы сигнала | 1988 |
|
SU1538143A2 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ КОРРЕКЦИИ КВАДРАТУРНЫХ ДЕМОДУЛЯТОРОВ | 2000 |
|
RU2187140C2 |
| Аналого-цифровой интегратор | 1982 |
|
SU1056227A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| Цифровой электропривод | 1990 |
|
SU1725358A1 |
8
ifZ.I
Фи2.2
-fl- -/7,2 -«/ О
717724
бл
ar
Д Ifei
0,f 0.2
