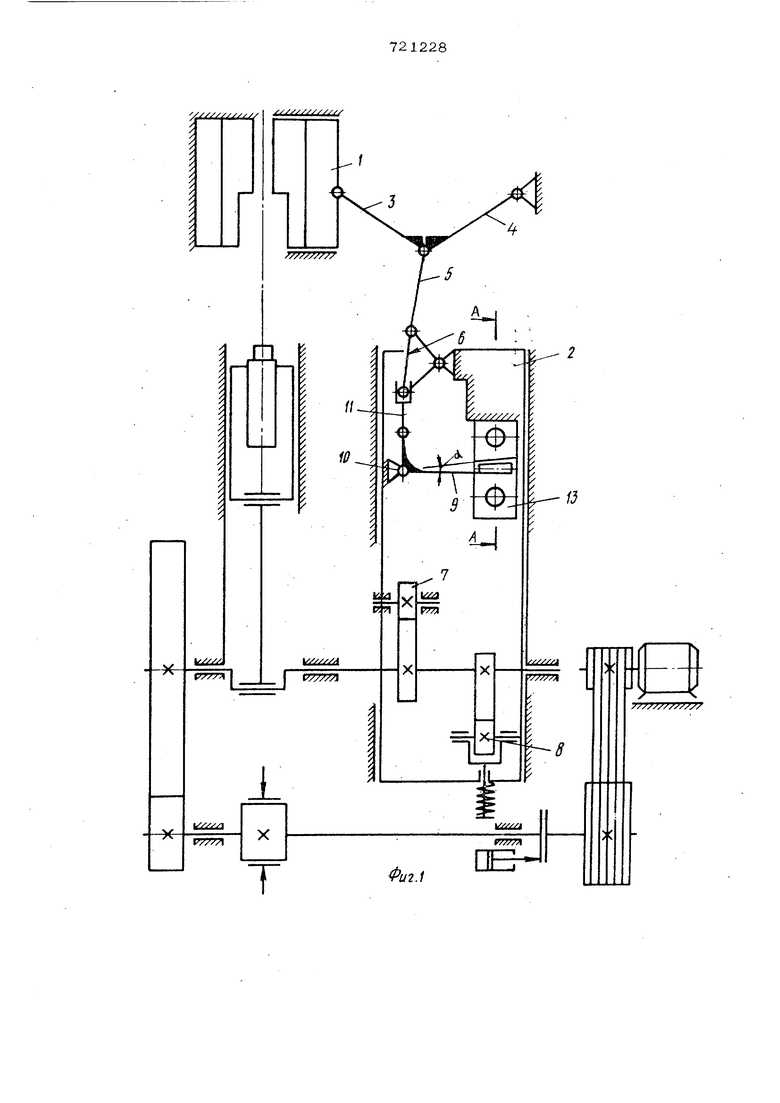
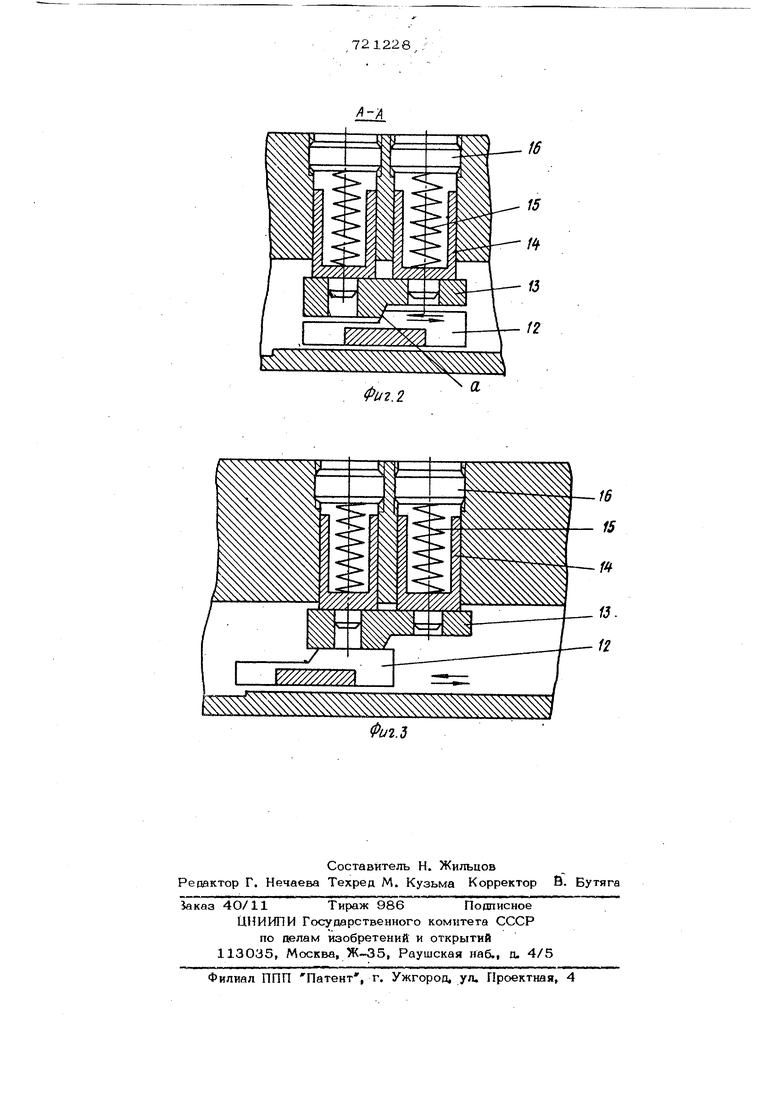
Изобретение относится к обработке ме таллов давлением, а именно к куанечнопрессовому машиностроению, в частности к горизонтально-ковочным машинам. Известна конструкция механизма зажима горизонтально-ковочной машинь, содер жашего зажимной ползун и связанный с ним боковой ползун с кривошйпно-рычажным приводом, а также предохранительное устройсТвО|установленное на боковом пол зуне 11. Однако в этой конструкции величина деформации пружины при срабат ывании механизма зависит от размеров рычагов пре дохранительного устройства, величины хопа, на котором обеспечивается предохранб няо, относительно велика, Цель изобретения - увеличение надежности механизма зажима. Это достигается тем, что в предлагаемой конструкции предохранительное устройство снабжено рамкой, внутренняя поверхность которой выполнена в виде ступеньки со скошенным переходом, установ- ленной в боковом ползуне и подпружинен ной относительно него, а также двуплечим рычагом, установленным посредством оси на боковом ползуне и связанным одним плечом с приводом ползунов, а другое плечо рычага выполнено со ступенчатой поверхностью, контактирующей со ступенчатой поверхностью рамки. Образующие поверхность переходов ступеньки внутренней поверхности рамки- и конца рычага расположены под углом к оси поворота рычага. На фиг. 1 показана кинематическая схема описываемого механизма зажима горизонтально-ковочной машины; на фиг. 2 то же, разрез А-А на фиг. 1, иллюстрирующий положение ступенчатых звеньев рамки и рычага при работе без перегрузок; на фиг. 3 - то же, положение звеньев в состоянии перегрузки. Механизм зажима горизонтально-ковочной машины содержит зажимной ползун 1, взаимодействуюип1Й с ним боковой ползун 2 с кривошипно-рычажным приводом, состоящим иэ рычагов 3, 4, 5, 6 и роликов 7 и 8, устарювленных на боковом пол зуне. Предохранительное устройство от перегрузок механизма зажима выполнено в вице двуплечего поворотного рычага 9, установленного посредством оси Ю на боковом ползуне 2, одно плечо которого через вилку рычага И связано с системой приводных рычагов 3, 5, 4 и 6 меха низма зажима. Второе плечо рычага 9, имеющее ступегнчатый конец 12 со скос рамкой 13, установленной подвижно в боковом ползуне 2 на направляющих коло ках 14 и подпружиненных относительно ползуна пружинами 3.5, закрепленными гайками 16. Внутренняя поверхность рам ки 13 также выполнена в виде ступеньки со скошенным переходом. При этом образующая скощённых пере
ходоБ ступенек на повторном двуплечем рычаге 9 и поверхности рамки 13 расположена под углом cL к оси рычага 9,
Механизм зажима горизонтально-ковоч- ной мащины работает следующим образом. 25 От кулаков, расположенных на коленчатом валу горизонтально-ковочной машины, через ролики 7, 8 получает движение боковой ползун 2. Далее через рычаг 9, который удерживается неподвижно с помощью 30 подпружиненной рамки 13, вилку 11, рычаги 6, 5, 3, 4 движение передается зажимному ползуну 1, который осуществляет зажим заготовок при своем движении вперед и разжим при движении в обратном направ- 35 лении. В случае, когда при своем движении вперед зажимной ползун 1 встречает сопротивление, превышающее номинальное, он прекращает свое движение. Боковой ползун продолжает движение, так как на не- О го воздействует через ролик 7 кулак прямого хода, установленный на коленчатом валу машины. Усилие, воспринимаемое боковым ползуном, а следовательно, и рычагом 9, рамкой 13, пружинами 15, рычага 45 ми 3, 4 5 и 6, возрастает, и когда оно достигает значения выше номинального, рычаг 9 своим наклонным выступом отводит рамку 13, которая начинает перемещаться, сжимая пружины 15, и займет по-50 ложение, как показано на фиг. 3. Деформация пружины 15 будет происходить до тех пор, пока наклонный выступ ступеньки рамки 13 не выйдет из зацепления с наклонным выступом ступеньки рычага 9, 55 после чего сжатие пружины прекращается, рычаг 9 проворачивается вокруг своей оси, преодолевая только силу трения, созжены 15 зависит только от высоты, наклонного выступа ступеньки рычага 9 и не зависит от величины поворота рычага и величины хода бокового ползуна.
Формула изобретения
1.Механизм зажима горизонтально-ковочной машины, содержащий зажимной ползун и связанный с ним боковой ползун с кривошипно-рычажным приводом, а также предохранительное устройство установленное на боковом ползуне, отличающийся тем, что, с целью увеличения надежности механизма зажима, предохранительное устройство снабжено рамкой, вьо тренняя поверхность которой выполнена в виде ступеньки со скощенным переходом, установленной в боковом ползуне
и подпружиненной относительно него, а также двуплечим рычагом, установленным посредством оси на боковом ползуне и связанным одним плечом с ползунами, а другое плечо рычага выполнено со ступенчатой поверхностью, контактирующей со ступенчатой поверхностью рамки, при этом конец последнего также выполнен ступенчатым аналогично внутренней поверхности рамки.
2.Механизм зажима по п. 1, о т.л и чающийся тем, что образующие поверхности скошенных переходов ступеньки внутренней поверхности рамки и конца плеча рычага расположены под углом к оси поворота двуплечего рычага.
Источники информации, . принятые во внимание при экспертизе
1. Авторское свидетельство СССР М 481359, кл. В 21 J 7/18, 1973. даваемую поверхностями рамки 13 и бокового ползуна 2 от пружин 15. Проворачиваясь, рычаг 9 поворачивает вилку 11, рТычаг 6, создавая возможность совершить полный ход боковому ползуну 2. При движении бокового ползуна назад, зажимной ползун также начинает вначале отходить назад до соприкосновения упоров, расположенных на рычагах 3, 4, после чего ползун 1 останавливается, при этом боковой ползун продолжает движение, рычаг 6, вилка 11, рычаг 9 возвращаются в исходное положение, и при подходе бокового ползуна к крайнему заднему положению рамка 13 выступом войдет в зацепление с идентичным выступом на рычаге 9 и займет первоначальное положение, как показано на фиг. 2. Гайки 16 служат для регулирования усилия поджатия пружин 15, Таким образом, величина деформации пру уХХХХХ ХХ ХХ
Pu2.2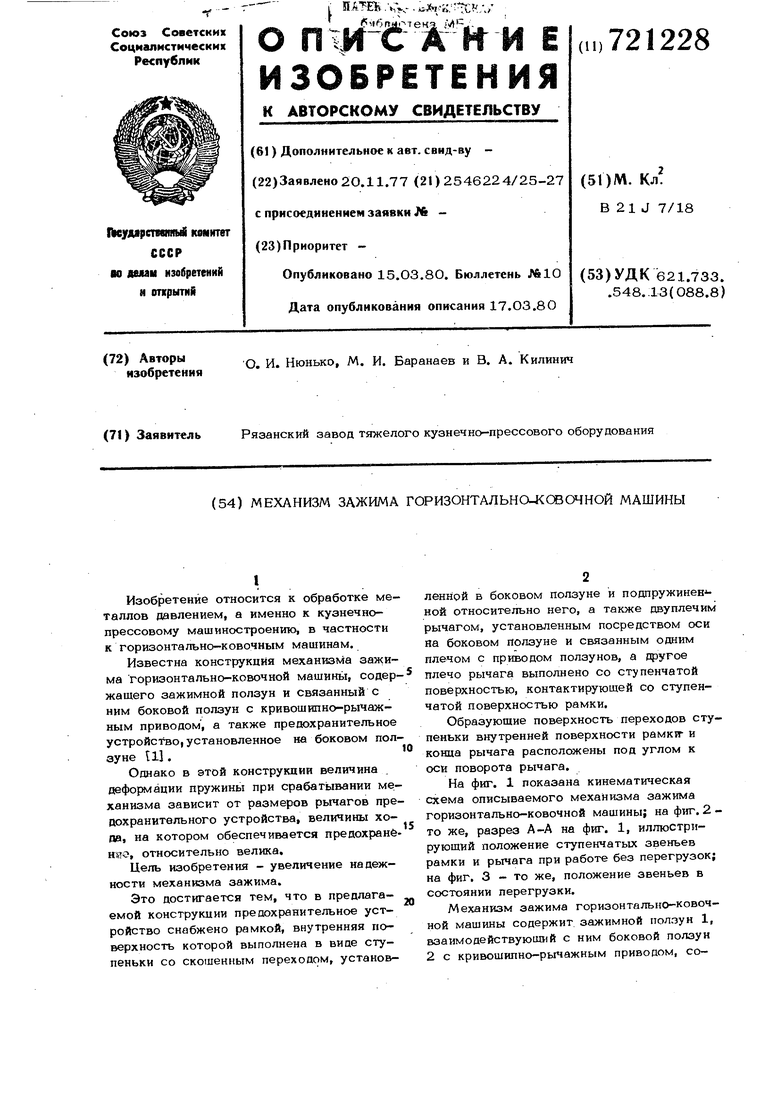
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимной механизм горизонтально-ковочной машины | 1980 |
|
SU994097A1 |
| Горизонтально-ковочная машина | 1977 |
|
SU904859A1 |
| Механизм зажима горизонтальноковочной машины | 1973 |
|
SU481359A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1967 |
|
SU224993A1 |
| Одноручьевой штамп для высадки деталей из штанги на гкм | 1971 |
|
SU447209A1 |
| Горизонтально-ковочная машина | 1973 |
|
SU610600A1 |
| Блок регулирования закрытой высоты матриц | 1980 |
|
SU956126A1 |
| Горизонтально-ковочная машина | 1969 |
|
SU356879A1 |
| МЕХАНИЗМ ПЕРЕЗАРЯЖАНИЯ НЕСАМОЗАРЯДНОГО ПИСТОЛЕТА | 2010 |
|
RU2447387C1 |
| Швейная машина цепного трехниточного стежка | 1988 |
|
SU1715907A1 |