(З) ЗАЖИМНОЙ МЕХАНИЗМ ГОРИЗОНТАЛЬНО-КОВОЧНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Горизонтально-ковочная машина | 1977 |
|
SU904859A1 |
| Горизонтально-ковочная машина | 1985 |
|
SU1291268A1 |
| Одноударный автомат для высадки гвоздей | 1982 |
|
SU1050793A1 |
| Проволочно-гвоздильный автомат | 1977 |
|
SU766716A1 |
| Автомат для изготовления гвоздей | 1979 |
|
SU1039625A1 |
| Автомат для двухсторонней высадки деталей стержневого типа | 1980 |
|
SU935193A1 |
| Горизонтально-ковочная машина | 1973 |
|
SU610600A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1967 |
|
SU224993A1 |
1
Изобретение относится к обработке металлов давлением, а именно к конструкциям зажимных механизмов горизонтально-ковочных машин.
Известен зажимной механизм горизонтально-ковочной машины, содержащий боковой ползун, соединенный системой рычагов с- ползуном, несущим матрицу, и привод бокового ползуна, выполненный в виде кинематически связанного с приводным валом кривошипного вала, на котором закреплены два кулака, контактирующие с двумя роликами бокового ползуна 1 }.
Этот механизм малонадежен и недостаточно долговечен.
Целью изобретения является повышение надежности и долговечности зажимного механизма.
Поставленная цель достигается тем, что в зажимном механизме, содержащем боковой ползун, соединенный системой рычагов с ползуном, несущим матрицу и
привод бокового ползуна, выполненный в виде кинематически связанного с приводным валом кривошипного вала, на котором закреплены два кулака, контаКтирукмцие с двумя роликами бокового ползуна, один из роликов бокового ползуна установлен на эксцентриковой оси, смонтированной в подшипниках бокового ползуна, а
,Q привод бокового ползуна снабжен
регулируемыми упором, дополнительным роликом, смонтированным на боковом ползуне , и подпружиненным двуплечим рычагом, связанным одним плечом с
5 эксцентриковой осью ролика, а другим - с регулируемым упором; при этом другой ролик установлен с возможностью конУактирования с дополнительным роликом ,и расположен на
го оси подпружиненного рычага, неподвижно закрепленного на оси бокового ползуна.- ;
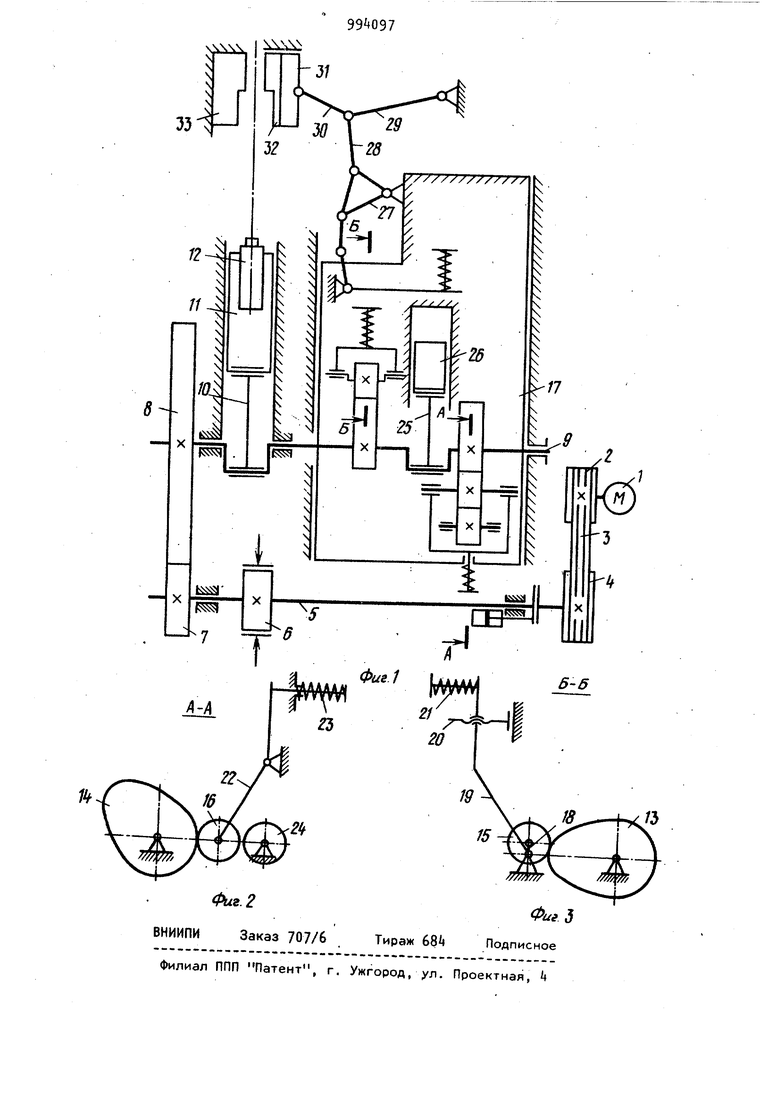
На фиг.1 изображена кинематическая, схема горизонтально-ковочной машины; на фиг.2 - разрез фиг.1 1кулак и ролик обратного хода с упором в виде дополнительного ролика); на фиг.З разрез Б-Б на фиг,1 (кулак с роликом холостого хода вперед и подпружиненный рыма г ), Устройство входит в конструкцию горизоитально-ково1 ной машины, которая содержит электродвигатель 1 -привода машины, сообщающий.движение через шкив 2 и клиноременную передачу 3 муфте-маховику 4, установленной на приводном валу 5, на котором смон тированы тормоз 6 привода, шестерня 7, передающая вращение через зубчато колесо 8 кривошипному валу 9, с кото рым соединен шатун 10 высадочного ползуна I I с установленным на нем пуансонами 12, На кривошипном валу 9 смонтированы кулаки 13 и привода механизма зажима (см.фиг.2 и 3 ) .которые )raктиpyют с роликами 15 и 16 бокового ползуна 17- При этом ролик 15 установлен на эксцентриково оси-18, смонтированной в подшипниках бокового ползуна 17- На оси 18 закре лен также рычаг 19, имеющий регулируемый упор 20 и пружину 21, обеспечивающую контакт ролика 15 с кулаком 13 в период холостого хода и выстоя зажимного механизма, а также отвод ролика в случае превышения расчетног для кулачкового привода усилия. Роли 1б установлен на оси рычага 22, который в свою очередь смонтирован под вижно на оси бокового ползуна 17 Рычаг 22 имеет пружину 23, которая обеспечивает по стоянный контакт ролика 16 с кулачком 14. - На боковом ползуне 17 установлен дополнительный ролик 2Ц, который служит стопором для ролика 1б при возникновении усилия выше расчетного во время обратного хода зажимного механизма, С кривошипным валом 9 соединен также шатун 25 с ползушкой 26, установленной в направляющих бокового ползуна 17 и сообщающей последнему движение при рабочем ходе. На боковом ползуне 17 смонтирова но устройство 27, обеспечивающее Предохранение.от перегрузок дополнительного кривошипно-шатунного привода механизма зажима. Устройство 27 через рычаги 28-30 соединяет боковой ползун 17 с зажимным ползуном 31 на котором установлена подвижная матрица 32. Неподвижная матрица 33 смонтирована непосредственно в станине машины. Горизонтально-ковочная машина работает следующим образом.Вращение от электродвигателя 1 через шкив 2 и клиноременную передачу 3 передается на маховик , в котором размещена муфта включения. При подаче сигнала на включение машины тормоз 6 освобождает приводной вал 5 после чего подается сигнал на включение муфты, которая сцепляет маховик с приводным валом. Вращение от вала 5 через шестерню 7 и зубчатое колесо 8 сообщается кривошипному валу 9От последнего движение передается по двум цепям: а)через шатун 10 высадочному ползуну 11 с закрепленными на нем . пуансонами 12; б)через кулаки 13 и 1, ролики 15 и 16, шатун 25 и ползушку 26 боковому ползуну. 17, а также предохранительному устройству 27, системе рычагов 28,30 и зажимному ползуну 31 с закрепленной на нем подвижной матрицей 32, В начале хода бокового ползуна 17 вперед (период холостого хода ) движение ему сообщается кулаком 13 через устройство, включающее в себя ролик 15, эксцентриковую ось 18, рычаг 19 и пружину 21; при этом от шатуна 25 ползушка 26 также получает движение, но поскольку между ползушкой 26 и боковым ползуном 17 имеется зазор, в этот период холостого хода механизма зажима движение ползуну 17 от дополнительного кривошипно-шатунного механизма не передается. При дальнейшем движении ползушки 26 относительно бокового ползуна 17 скорости их движения выравниваются ползушка 26 вступает в контакт с ползуном 17 и затем перемещение механизма зажима осуществляется от кривошипного вала 9 через шатун 25, ползушку 26, боковой ползун 17, предохранительное устройство 27, систему рычагов 28-30, в результате чего перемещается зажимной ползун 31 с подвижной матрицей 32. Происходит рабочий ход, при котором производится штамповка поковки зажимным ползуном 31, а затем зажим с заданным усилием. Профиль кулака 13 выполнен таким образом, что в период рабочего хода этот кулак с роликом 15 не контакти599рует и между ними имеется зазор, величина которого может регулироваться с помощью упора 20. При дальнейшем повороте кривошипного вала,когда матрицы достигают крайнего переднего положения, рабочая поверхность кулака V3 вступает в контакт с роликом 15 а ползушка 26 начинает отходить от бокового ползуна 17. Удерживание (высотой) матриц в положении обеспечивается кулаком 13. В процессе износа подшипников скольжения шатена 25 профилированная поверхность кулака 13 мо) вступать в контакт с роликом 15 несколько раньше, но так как ролик 15 подпружинен,: то при превышении, допустимой для него нагрузки эксцентриковая ось 18 с рычагом 19 поворачивается пружину 21, а ролик 15 начинает отжиматься, в результате чего вся нагрузка передается через ползушку 26 и шатун 25, что исключае перегрузку и возможность преждевременного выхода из строя кулачкового привода. После осадки пуансонами 12 высадочного ползуна 11 последний отходит в заднее исходное положение; при это матрица 32 с ползуном 31 также начинает отходить в исходное положение. Отвод ползуна 31 осуществляется кула ком Н через ролик 16, боковой ползу 17, предохранительное устройство 27 и систему рычагов 28-30 Ползушка 26 в это время свободно перемещается в ползуне 1. Пружина 23 рассчитана на усилие обратного хода механизма зажима и обеспечивает постоянный контакт ролика 16 с профилем кулака k, В случае превышения нагрузки на ролике 1б последний отжимается кулаком до упора в дополнительный ролик 2. После этого кулаком Н- че рез ролик 16, дополнительный ролик 2, боковой ползун 17i предохранительное устройство 27, систему рычаго 28-30 осуществляется отвод зажимного ползуна 3 с матрицей 32. Поскольку ось дополнительного ролика 2 расположена в момент раскрытия матриц на линии действия силы кулаком И и роликом 16, ось ро лика 16 и его подшипники частично разгружены и воспринимают только усилие пружины 23, а остальная часть нагрузки передается от кулака V через ролик 16 на ролик 2k, 7 Таким образом, в случае заклинивания поковки в матрицах в момент срыва , зажимного ползуна подшипники ролика 16 будут разгружены, чем исключается их преждевременный выход из строя. Высадочный ползун 11 и зажимной ползун 31 совершили полный цикл, и все механизмы останавливаются в исходном .положении. В дальнейшем цикл повторяется в описанной последовательности. Если муфту не выключить, машина будет работать в автоматическом цикле. Предлагаемое техническое решение позволяет повысить надежность и долговемность зажимного механизма, а следовательно, и ГКМ в целом, что обеспечивает за счет сокрацения времени на ремонт машины увеличение ее производительности. Формула изобретения Зажимной механизм горизонтальноковочной машины, содержащий боковой ползун, соединенный системой рычаговс ползуном, несущим матрицу, и привод бокового ползуна, выполненный в виде кинематически связанного с приводом валом кривошипного вала, на котором закреплены два кулака, кон-, тактирующие с двумя роликами бокового ползуна, отличающийся тем, что,с целью повышения его надежности и долговечности, один из роликов бокового ползуна установлен на эксцентриковой оси, смонтированной в подшипниках бокового ползуна, а привод бокового ползуна снабжен регулируемым упором, дополнительным роликом, смонтированным на боковом ползуне, и подпружиненным двуплечим рычагом, связанным одним плечом с эксцентриковой осью ролика, а другим - с регулируемым упором, при этом другой ролик установлен с возможностью контактирования с дополнительным роликом и расположен на оси подпружиненного рычага, неподвишно закрепленного на оси бокового ползуна. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2 7 50 /25-27, кл. В 21 J 7/18, 19.0. 77 (прототип).
