(5) БЛОК РЕГУЛИРОВАНИЯ ЗАКРЫТОЙ ВЫСОТЫ МАТРИЦ
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимной механизм горизонтально-ковочной машины | 1980 |
|
SU994097A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1972 |
|
SU435044A1 |
| Механизм регулировки усилия зажима заготовок | 1982 |
|
SU1038044A1 |
| Горизонтально-ковочная машина | 1983 |
|
SU1505657A1 |
| Радиально-ковочная машина | 1979 |
|
SU804164A1 |
| ГОРИЗОНТАЛЬНАЯ КОВОЧНАЯ МАШИНА | 1969 |
|
SU247015A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Радиально-ковочная машина | 1979 |
|
SU780332A1 |
| Радиально-ковочная машина | 1979 |
|
SU880596A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1967 |
|
SU224993A1 |
1
Изобретение относится к области обработки металлов давлением, точнее к блокам регулирования закрытой высоты матриц преимущественно горизонтально-ковочных машин.
Иавестен блок регулирования закрытой, высоты матриц горизонтальноковочных машин, содержащий зажимной ползун, связанный через систему рычагов с боковым ползуном, соединенным с приводом, матрицы, одна из которых неподвижно закреплена на станине, а другая - на зажимном ползуне, червячную пару, червяк которой установлен на станине в опорах, а червячное колесо закреплено на подвижно установленной на станине эксцентриковой оси, кинематически связанной с рычажной системой зажимного ползуна.
Основным недостатком известного механизм является то, что в блоке регулирования закрытой высоты матриц не предусмотрена компенсация зазоров в опорах эксцентриковой оси, вследствие чего усилие зажима через рычаги, эксцентриковую ось и кинема тически связанное с этой осью червячное колесо редуктора замыкается на червяк, что приводит к износу звена эксцентриковая ось - чершячное колесо - червяк и может вызвать поломку последнего.
Целью изобретения является повышение надежности работы и производительности.
Цель достигается тем, что в блоке 3 регулирования закрытой высоты матриц горизонтально-ковочной машины, содержащем зажимной ползун, связанный через рычажную систему с боковым ползуном, соединенным с приводом мат рицы, одна из которых неподвижно закреплена на станине, а другая - на зажимном ползуне, червячную пару, червяк которой установлен на станине в
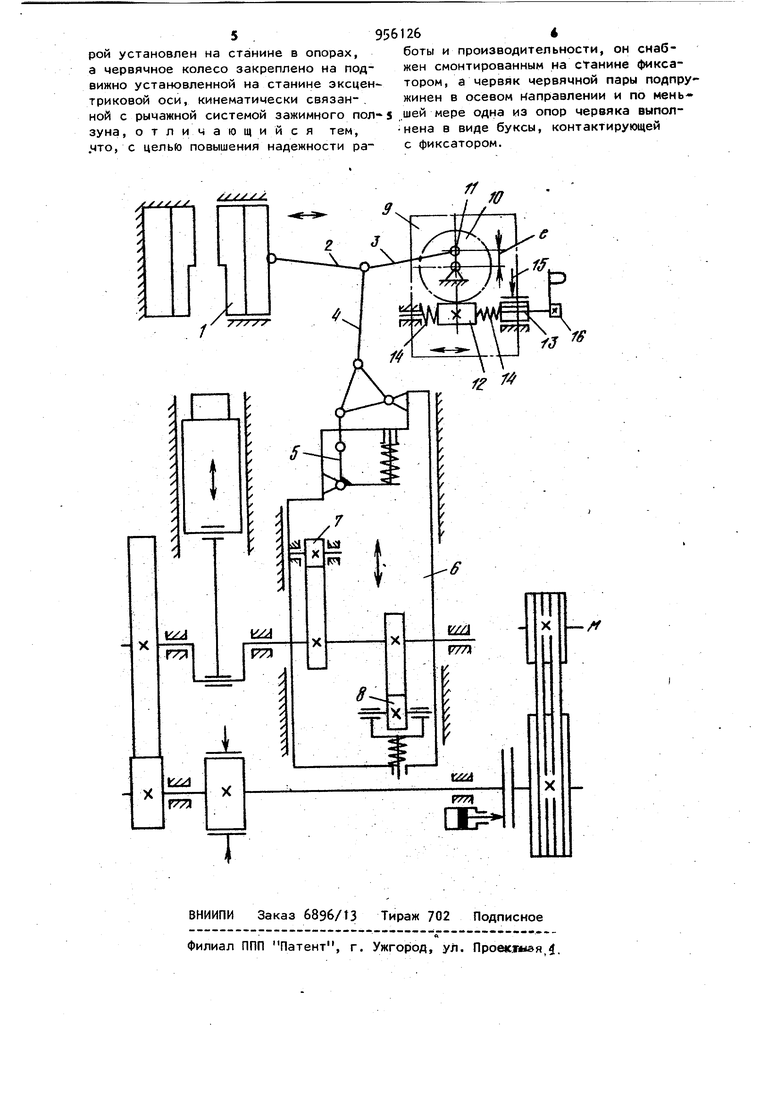
опорах, а чеврячное колесо закреплено на подвижно установленной станине эксцентриковой оси, кинематически связанной с рычажной системой зажимного ползуна, установлен фиксатор, червяк ; червячной пары Подпружинен в осевом направлении и по меньшей мере одна из опор выполнена в виде буксы, контактирующей с фиксатором. На чертеже показана кинематическая Ю станины схема предлагаемого блока регулирова ния закрытой высоты матриц горизонтально-ковочных машин (ГКМ), Механизм содержит зажимной ползун 1,взаимодействующее с ним через рычажную систему, состоящую из рычагов 2,3 и А, предохранительное устройст во 5 и боковой ползун 6 с роликами 7и 8. Блок регулирования закрытой высоты матриц содержит корпус 9 и размещенные в нем червячное колесо 10, закрепленное на эксцентриковой оси 11, установленной подвижно в опорах станины (не показана), червяк 12, одна из опорных шеек которого размещена в поворотной буксе 13, а другая - в неподвижной опоре корпуса 9, пружины И, фиксатор 15 и маховичок 16. Механизм работает следующим образом. От кулаков, расположенных на коленчатом валу ГКМ, через ролики 7 и 8получает движение боковой ползун 6 Далее движение через предохранительное устройство 5, рычаги Ц, 3и 2 передается зажимному ползуну 1, который осуществляет зажим заготовки при своем движении вперед (влево по чертежу ) и разжим - при обратном движении. Однако отклонения размеров при из готовлении блоков матриц (не показан рычагов 2, 3 и i и износ втулок последних сказываются на величине усиЛИЯ зажима. Для обеспечения оптимал ной величины этого усилия необходимо расстопорить буксу 13 с помощью фик сатора 15 обеспечив ее свободное вращение совместно с червяком 12 в корпусе 9, и вращением червяка 12 с помощью маховика 16 через червячное колесо 10 повернуть эксцентриковую ось 11 в требуемом направлении, в результате, чего ползун 1 с закрепленной на нем матрицей переместится в нужном направлении (к оси зажима заготовки или от нее), создав необходимый предварительный натяг, а следовательно, и необходимое усилие зажима, .
В процессе работы машины зажимной ползун 1, двигаясь вперед (как было сказано выше), зажимает заготовку. Усилие зажима через рычаги 2.и 3 передается на эксцентриковую ось 11, а так как эта ось в опорах установлена подвижно (с зазорами), то создаваемое при этом усилие вызовет смещение оси 11 в радиальном направлении, которое будет восприниматься через червячное колесо 10 червяком 12. Поскольку червяк 12 в направлении действия этой силы подпружинен, он переместится вместе с осью 11 и червячным колесом 10 до выборки зазоров в опорах оси 11, в результате чего червяк 12 разгрузится от этого усилия, чем исключается его поломка. Однако при осевом перемещении червяка возникает возможность самопроизвольного его поворота вокруг своей осипри созданном необходимом усилии зажима. Для исключения этого явления опора червяка 12, размещенная в буксе 13, имеет возможность осевого смещения, а вращательное движение червяка возможно только совместно с буксой 13, которая в процессе работы машины фиксируется от поворота фиксатором 15i а перед регулировкой освобождается и имеет возможность поворота вокруг своей оси совместно с червяком. Изобретение позволяет значительно повысить точность регулировки закрытой высоты матриц, упростить и ускорить процесс этой регулировки, повысить надежность работы регулировочного блока, за счет чего обеспечивается повышение надежности и производительности работы механизма зажима ГКМ, а также улучшение ка1чества изготавливаемых на последней изделий. Формула изобретения Блок регулирования закрытой высоты матриц, преимущественно горизонтально-ковочных машин, содержащий зажимной ползун, связанный через рычажную систему с боковым ползуном, соединенным с приводом, матрицы, из которых неподвижно закреплена на станине, а другая - на зажимном ползуне, червячную пару, червяк кото
