Изобретение относится к обработке металлов давлением.
Известна горизонтально-ковочная машина содержащая смонтированные на станине механизмы - важима обрабатываемого материа- g ла и высадки, снабженные индивидуальными приводами, каждый из которых выполнен в виде установленных в опорах кривошипного и приводного валов, кинематически связанных между собой и с муфтой, итормозом.атак- же систему управления и синхронизации приводов указанных механизмов, снабженную кулачками и клапанами включения муфт и тормозов 1 . . Известная машина не обладает достаточ- 5 ной точностью и производительностью работы вследствие дополнительных трудозатрат на выведение привода механизма зажима из распорного состояния, а также невозмоясности достаточной синхронизации при работе 80 приводов механизмов -зажима и высадки.
Цель изобретения - повьш1ение точности и производительности работы машины.
Для этого в предлагаемой машине пщвод .механизма зажнма. снабжен jffirtaroM, шарнар 9
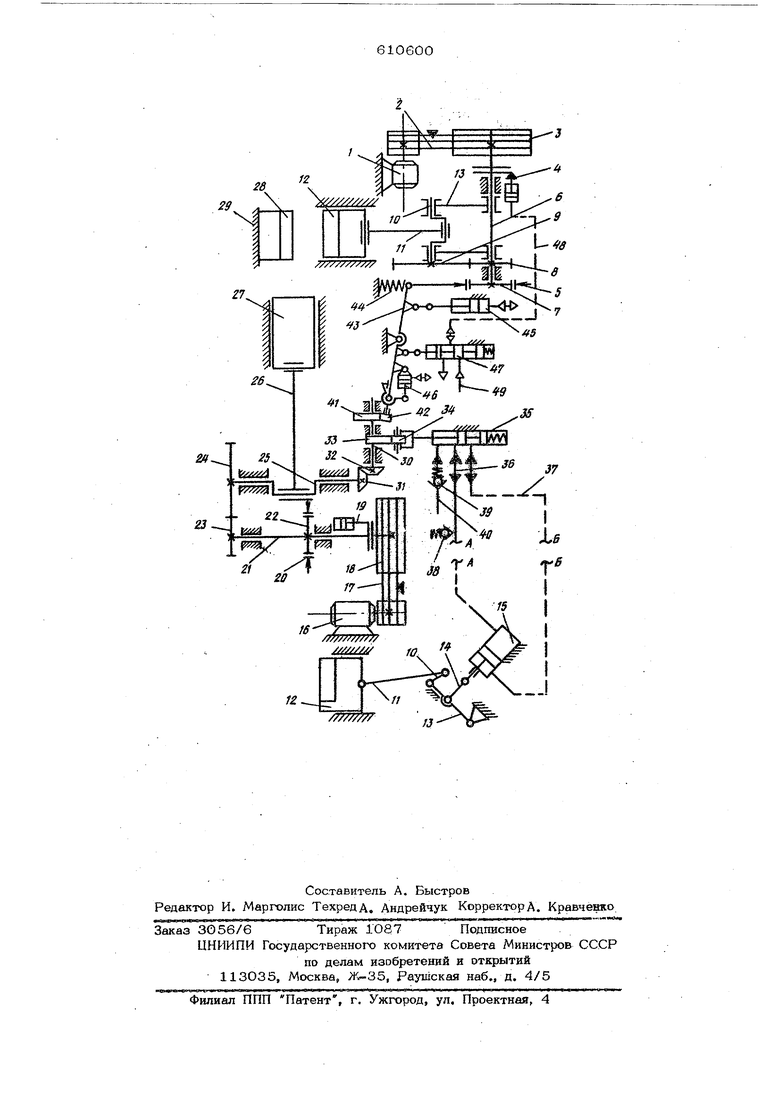
но связанным одним концом с приводным валом, а другим - жестко с опоракга кривошипного вала, а также смонтированным на станине силовым цилиндром, шток которого связан с указанным рычагом, а поршневая полость - с золотником, соединенным с одним из кулачков системы управления и синхронизации, система управления и синхронизации приводов снабжена шарнирно связан ным со станиной приводным двуплечим рычагом и связанным с ним золотником, взаимодействующим с муфтой привода механизм зажима, а также распределительным вгшом, на котором установлены кудачки1 прн этом одно : плечо двуплечего рычага контактируе с тормозом привода механизма зажима, а другое - с кулачками распределительного вала, на станине смонтированы дополннтел ные сиповые цилиндры, связанные с прнво ;ным двуплечим рычагом, а распреоепвгепьный вал расположен параллельно шнпиому валу привода механизма залии ма и связан посредством зубчатой передачи с кривошипным валом прЕво -i да механизма высешки. На чертеже схематически изображена ков струкция горизонтально-ковочной машины: элементы схемы, расположенные на чертеже ниже , представляют собой часть сх мы в другой проекции.. Машина содержит смонтированные на ста |нвне механизмы зажима и высадки обраба;тываемого материала, а также систему уп|ра вления и синхронизашга приводов указан ных механизмов. Механизм зажима состоит из электродвигателя 1, клиноременной передачи 2, маховика3, муфты 4 вкл1очения| тормоза 5, приводного вала 6 со шкивом. тормоза 7, зубчатой передачи 8, 9 кривошипного вала Ю, шатуна 11, ползуна зажимного с матрицей 12, поворотного рыча-. га 13, опирающегося через рычаг 14 на силовой цилиндр 15 с поршнем, Механизм высадки состоит из электродви гателя 16, клиноременной передачи 17, мат ховика 18, муфты 19 включения, тормоза 2О, приводного вала 21 со шкивом тормоза 22, зубчатой передачи 23, 24, криво-, шипного вала 25, шатуна 26, ползуна..27 в инструментом, Неподвижная матрица 28 смонтирована на станине 29,, Система управления и синхронизации пpиf водов механизмов зажима и высадки содер-. жнт распределйтелшый вал ЗО, связанный зубчатой передачей 31 и 32 с кривошипным валом 25, кулачковый 33 с ро ликом 34 привода золотника 35, соединен-г него магистралями 36 и 37 с-цилиндром 1 йредохрайителу1ый клапан 38, обратный кла Ьен 39 и-трубопровод подпитки 4О, кулач.ковыЙ механизм 41 с роликом 42 привода цеуплечего 43, одно плечо которого шарнирно связано с лентой колодочно-шарнирного Topkoaa и опирается на пружину 44 этого тормоза. Это .же плечо шарнирно связано с цилиняром 45, имеющим поршень цля првнудит л&ного растррмажиВания тормоза S Приводное плечо рычага 43 шарнирно связано рычагом е роликом и цилиндром 46, что позволяет управлять работой ролика 42 Это же плечо рьгаага 43 шарнирно связано с зояотнйком 47 включений посредством магистрали 48 муфты 4 привода механизма зажима. Трубопровод 49 связан с источником рабочей, среды. Требуемая циклограмма работы машины обеспечивается .соотвётству ЮШ6Й профилировкой кулачков 33и41и выбором передаточного отношения пары шестерен 31 и 32 В исходном положении элементы зажимг ного и высадочных механизмов находятся в крайнем заднем положении. Тормозы 20 и $ заторможены, муфты 19 и 4 выключены, РОЛИК 42 находится в рабочем положении. цилиндр 45 отключен, С пульта управления включаются электродвигатели смазочных .механизмов (не показаны) и электродвигатели 16 и 1 приводов рабочих механизмов. Золотник 35 кулачком 33 установлен в положение, обеспечивающее поступление жидкости в полость над поршнем шшиндра 15 по магистрали 36. Релшм работы - одиночный ход. Растормаживаем тормоз 20 и включаем муфту 19. Вращение от двигателя 16 передается через элементы 17, 18, 19, 21, 22, 23, 24, 25, 26 к ползуну 27, Одновременно с этим вращение от вала 25 через элементы 32 и 30 сообщается кулачку 41, который приводит в движение рычаг 43, При этом пружина 44 сжимается и тор4моа 5 растормаживается, золотник 47 перемещается и включает в работу муфту 4. Этим обеспечивается передана движения от двигателя 1 через элементы 2, 3, 4,6 8, 9, 10, 11 матрице 12. Происходит одновременное движение высадочного ползуна 27 и матрицы 12, .йо так как ход последней в несколько раз меньше хода ползуна 27, то вначале происходит зажим обрабаты ваемой заготовки матрицами 12 и 28, а затем уже высадочным ползуном 27, После смыкания матриц происходит выключение муфты 4 и включение тормоза 5, Зажимный механизм, остановлен в крайнем переднем положении. Выключение муфты 4 и включение тормоза 5.производится кулачком 41, Вал 30 вращается, в два раза быстрее, чец вал 25. чем обеспечивается необходимый цикл работы механизма ;эажима. Ползун 27 продолжает движение ft производит необходн), мую работу по формообразованию. Заготовки. При его обратном ходе кулачок 33 пере мешает золотник 35, вьщодя из раепора (ханизм зажима путем снятия напряженности в системе посредством соединения магистрйк лей 36 и 37 золотником: 35, а кулачок 41 производит включение муфты 4 и выклк чение тормоза 5. Механизм заяшма отводит матрицу 12 в крайнее задаее положение. Отходит в крайнее заднее положение и высадочный ползун 27. В крайнем заднем положении оба механизма остйнавливаются. Цикл повторяется. Работа машины в режиме Непрерывных ходов высадочного ползуна Рабочую среду подают в цилиндр .45 и выпускают из цилиндра 46, При этом д&уплечий рычаг 43 получает движение при неподвижном ползуне 27, Матрицы 12 и 28-смыкаются, цилиндр 45 отключается и включается муфта 19, Тормоз 2О выключается. При таком положений высадочньА ползун может сделать несколько ходов.
Работа машины в режиме непрерьюных ходов зажимного механизма.
Рабочую среду вьтускают из цилиндра 46, Подают в цилиндр 45. Происходит пово4рот рьтага 43, включение муфты 4 и выкпючение тормоза 5. Зажимный ползун с матрицей 12 будет производить столько ходов, сколько раз будет включен в работу цилиндр 46,- При этом останов зюкимного ползуна b исходном положении осуществляется авто матИчески от командоаппарата, кинематически связанного с валом 1О,
Наибольший эффект от реализации предложенного технического решения может быт1Ь получен при создании горизонтально-ковочт ной МАШИНЫ с использованием механизма эвжима в качестве формообразукшего или в случае использования его в качестве заж мнего с усилием зажима, превьпиаюшим усилие высадки в несколько pa3j
р м у л а и э о б р е т е н и я
Торизонтаяьно-ковочная мшиина, coдepжafщая смонтированные на станине механизмы зажима обрабатываемого материала и высадки, снабженные индивидуальными приводами, каждый из которых выполнен в виде установленных в опорах кривошипного и приводного валов, кинематически связанных между собой и с муфтой, и тормозом, а
также систему упр 1вления и синхронизации приводов указа1шых механизмов, снабженную кулачками и клапанами включения муфт
и тормозов, отличающаяся тем( что, с целью повьш1ения точности и произ- . водительности работы, привод механизма зе жима снабжен рычагом, шарнирно связанным одним концом с приводным валом, а другим жестко с опорами кривошипного вала, а смонтированным на станине; силовым: цилиндром, шток которого связан с указанным рычагом, а поршневая полость - с золотником, соединенным с одним из кулачков системы управления и синхронизации, система управления и синхронизации приводов снабжена шарнирно связанным со станиной Приводным двуплечим рычагом и связанным с ним золотником, взаимодействующим с муфтой привода механизма зажима, а также распределительным валом, иа котором установлены кулачки, при этом одно плечо двуплечего рычага контактирует с тормозом привода механизма зажима, а другое - с кулачками распределительного вала, иа станияе смонтированы дополнительные силовые цилиндры, связанные с приводным двуплечим рычагом, а распределительный вал расположен параллелыю кривошипному валу привода механизма зажима и связан посредством зубчатой передачи с кривошипным валом привода механизма высадки.
Источники информации, принятые во внимание при экспертизе:
1. Патент ФРГ N 919018, кл, 7 9/06. 1949.
28
29
1Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноударный автомат для высадки гвоздей | 1982 |
|
SU1050793A1 |
| Автомат для двухсторонней высадки деталей стержневого типа | 1980 |
|
SU935193A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1967 |
|
SU224993A1 |
| Автомат для изготовления гвоздей | 1979 |
|
SU1039625A1 |
| Автомат для двусторонней высадки утолщений на стержневых заготовках | 1983 |
|
SU1174144A1 |
| Зажимной механизм горизонтально-ковочной машины | 1980 |
|
SU994097A1 |
| Устройство для разделения прутковогоМАТЕРиАлА HA зАгОТОВКи | 1978 |
|
SU841804A1 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Горизонтально-ковочная машина | 1977 |
|
SU904859A1 |