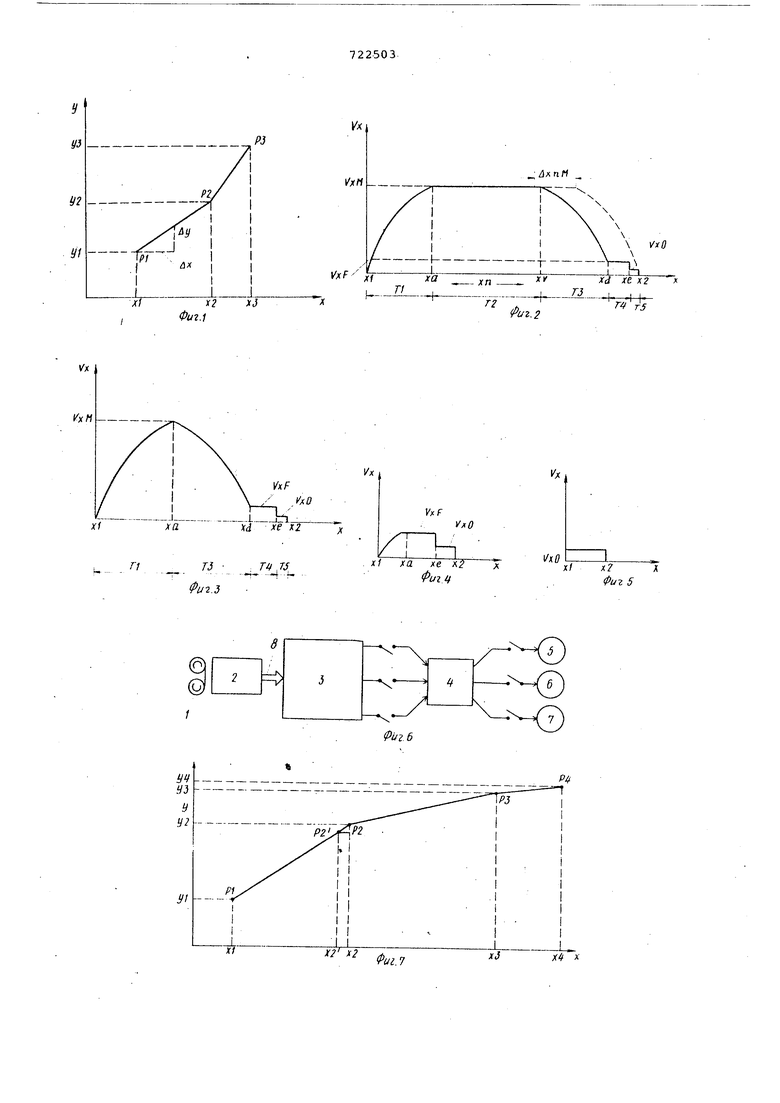
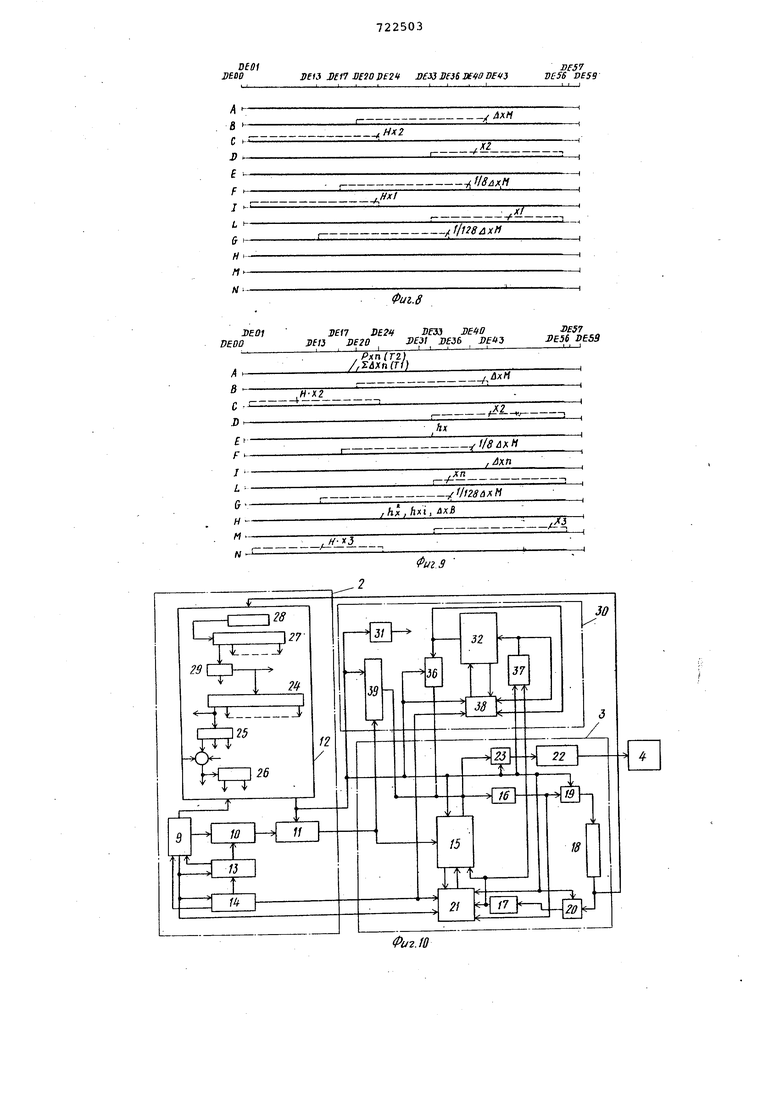
стра записи, со вторым входом третьего коммутирующего логического элемента, третий вход арифметичес кого блока является вторым входом интерполятора, выход регистра записи соединен со вторым входом второго коммутирующего логического элемента, выход блока памяти является вторым выходом интерполятора, выход регистра считывания является третьим выходом интерполятора. Недостаток этого устройства также состоит в относительно низкой точности отработки траектории. Целью изобретения является увеличение .точности отработки траектории. Для этого в устройство для управления движущимся объектом, содержащее программируюи1ий блок, цифроанало говый преобразователь, интерполятор, первый и второй выходы которого соед нены соответственно с входами цифроаналогового преобразователя и программирующего блока,,первый,второй, третий и четвертый входы интерполято соединены с соответствующими выходами программирующего блока, причем интерполятор содержит блок памяти, регистр записи, регистр считьшания, первый, второй и третий коммутирующи логические элементы, арифметическийблок, преобразователь информации в параллельную форму, выход которого является первым выходом интерполятор и блок управления интерполятором, связанный с арифметическим блоком, первый и второй входы блока управления интерполятором соединены с выходами регистров записи и считывания соответственно, третий вход блока управления интерполятором является первым входом интерполятора, соедине с первым входом арифметического блока и соединен с управляющими входами первого, второго и третьего коммутирующих логических элементов, выходы которых соединены соответственно со входом блока памяти, со входом регис ра считывания и со входом преобразователя информации в параллельную форму, четвертый и пятый входы блока управления интерполятором являются соответственно третьим и четвертым входами интерполятора, второй вход арифметического блока соединен с выходом регистра считывания, пятый и шестой входы интерполятрра соединены со входом регистра записи, выход арифметического блока соединен со входом регистра записи, со вторым входом третьего коммутирующего логического элемента, третий вход арифметического блока является вторы входом интерполятора , выход регистра записи соединен со вторым входом второго коммутирующего логического элемента, выход блока памяти является вторым выходом интерполятора, выход регистра считьшания явля ется третьим выходом интерполятора, дополнительно введен вычислительный блок, первый, второй и третий входы которого соединены с соответствующими выходами программирующего блока, четвертый вход соединен со вторым выходом интерполятора, пятый и шестой входы которого соединены соответственно с первым и вторым выходами вычислительного блока; кроме того, вычислительный блок устройства содержит арифметический узел,узел местного управления,выход которого соединен с управляющим входом арифметического узла, входной и выходной регистры, первый и второй регистры приема, входы которых соединены с управляющими входами входного и выходного регистров и первым входом узла местного управления и является первым входом вычислительного блока, второй вход которого соединен йо вторым входом второго регистра приема, а третий вход соединен со вторым входом узла , местного управления, третий вход которого соединен с выходом входного регистра и с входом арифметического узла, выход которого соединен со входом выходного регистра и четвертым входом узла местного управления, выходы регистра приема и выходного регистра являются первым и вторым выходами вычислительного блока, вход входного регистра является четвертым входом вычислительного блока; кроме того, арифметический узел устройства содержит решающий элемент, первую и вторую схемы сравнения, причем выход равенства первой схемы сравнения соединен с первым входом второй схемы сравнения, выход решающего элемента соединен со вторым входом первой схемы сравнения и является выходом арифметического -узла, выход второйсхемы сравнения соединен с первым входом первой схемы сравнения, второй и третий входы второй схемы сравнения являются управляющими входами арифметического узла. Ниже приводится описание предпочтительной конструктивной реализации изобретения. На фиг.1 показан пример пути движущейся части станка, управляемого предлагаемым устройством; на фиг. 2-5 - диаграммы скорости в сравнении с графиком перемещения для движущейся части станка; на фиг. 6 - блок-схема предлагаемого устройства; на фиг 7 показаны следующие один за другим отрезки пути,проходимого движущейся частью; на фиг. 8, 9 - содержимое регистров на двух различных этапах работы; на фиг. 10 представлена более подробная блок-схема предлагаемого устройства, в которой раскрыты различные его узлы; на фиг.11 показана детализированная логическая схема блоков управления работой устройства управления движущимся объектом.
Устройство управляет работой станка, в котором движущаяся часть перемещается вдоль одной или нескольких осей. Например будем полагать, что возможно перемещение движущейся части вдоль двух осей (X, Y, или X и Z, или Y, Z), которое осуществляется инструментом, меняющим положение относительно заготовки или, наоборот, оно может состоять в перемещении заготовки относительно инструмента.
Положим, что указанная движущаяся часть выполняет движение вдоль непрер,ьшной траектории (расположенной в плоскости осей X и Y), которая аппроксимируется серией прямолинейны сегментов, точки разрыва лежат на идеальной непрерывной линии и являются точками, определенными программой. Поэтому движущаяся часть станка перемещается по прямолинейным отрезкам между каждойпарой следующих друг за другом точек (см.фиг.1).
Для каждого прямолинейного сегмента Р1-Р2, Р2-РЗ траектории, достаточно определить координаты конечной точки, а скорость продвижения или величина подачи могут быть определены в начале программы и всякий раз, когда их величина изменяется, устанавливать интерполятор с запоминающим устройством.
Поэтому, программа состоит из серии блоков, каждый из которых содержит последовательность данных типа 1X-1Y-K1Y-K2Y-K3Y-K4V-K5V-IX-SX-KIXK2X-K3X-K4X-KbX-K6X-K7X-lY-KlV-K2VK3V-K4V-KbV-lY-SY-KlY-K2Y-K3Y-K4YK5Y-K6Y-K7Y-CR, в которой lY, IX, IY являются адресными кодовыми комбинациями, показывающими, что информация относится к скорости V, оси X и оси соответственно: SX и SY являются кодовыми комбинациями, показывающими алгебраические знаки координат X и Y конечных точек прямолинейного сегмента траектории, кодовые комбинации KIV и K5V представляют собой пять десятичных цифр числа, определяющего величину скорости V; кодовые комбинации от К1Х до К7Х и от K1Y до K7Y предсталяют собой семь десятичных цифр числа, определяющего соответственно, координаты X и Y конечной точки; CR, являющаяся кодовой комбинацией, означающей конец блока, вызывает пуск интерполятора для пополнения данных в этом блоке. Блоку кодовых комбинаций, относящемуся к перемещению вдоль оси и кодовой комбинации O.R, могут пред1иествовать кодовые кок бинации AU1 и AtTN для управления вспомогательными операциями станка, такими, как изменение скорости и направления вращения патрона, смазка, автоматическая смена инстру мента и т.д.
Нужно отметить, что семь кодовых комбинаций от К1Х до К7Х и KlYдo K7Y выражают десятичные значения координат X и Y от одного микрона до десяти, для удовлетворения требуемой точности и максимальных перемещений. Пять кодовых комбинаций K1V до KbV в свою очередь отражают значение скоростей.
Поэтому, данные, вводилые в интерполятор в виде блока програм1 ы, содержат только максимсшьные величины подачи или скорости и координаты конечной точки. Дальнейшая информация, необходимая для линейной интерполяции траектории движущейся части между начальной и конечной точками, рассчитывается интерполятором.
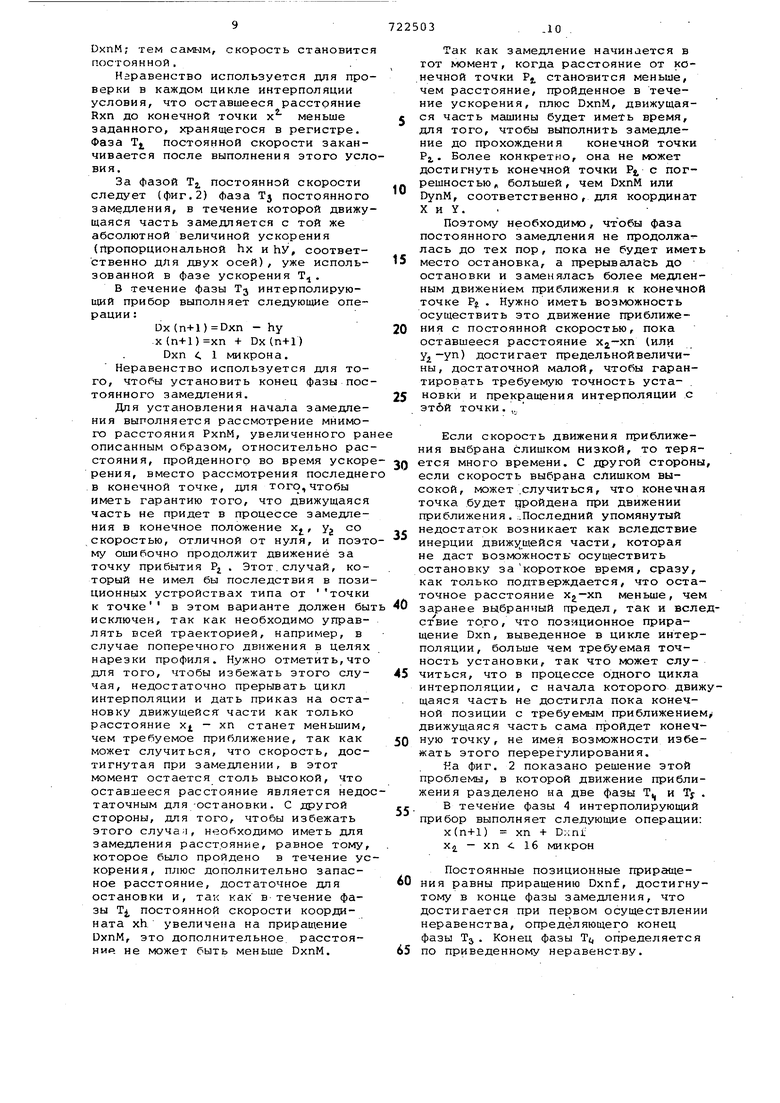
Из начальной точки, например Р1(Х1, Y1), движущаяся часть должна ускоряться вдоль прямолинейного сегмента траектории до тех пор, пока она не достигнет максимально допустимой величины подачи или скорости и затем должна двигаться с постоянной скоростью определенное расстояние, далее она должна двигаться с замедлением, чтобы .достигнуть конечной.точки Р2(Х2, Y2) с нулевой скоростью. Этот тип движения показан на фиг.2, где координата вдоль оси X, является абсциссой, а скорость вдоль этой оси показана как ордината. Предпочтительно, чтобы сегменты между координатами х1 и ха и.между координатами и проходились с постоянным ускорением и постоянным замедлением, соответственно Для линейности проходимого пути необходимо, чтобы отношение между приращениями двух координат X и у , получаемыми за одинаковый интервал времени, было бы всегда равным отношению расстояний (xj-x) и () между двумя конечныг й точками (фиг.1), т.е.
dx . Xj-xt
(За
в котором d и dy показывают приращения координат X,у. Поэтому, мгновенные скорости вдоль этих осей, а также мгновенные ускорения вдоль этих осей, будут также находиться в
указанном отношении друг к другу.
Для того, чтобы двигаться вдоль прямолинейной траектории между Р1 и Р2 с величиной подачи или скорости,
соответствующими графику фигуры 2, необходимо выполнить ряд вычислений, которые осуществляются интерполирующим прибором, в соответствии с принципами, описываемыми далее. Интерполирующий прибор работает циклически, причем DT является постоянной времени цикла интерполяции.Составляющая движения вдоль оси X будет считаться первой.
Положим, что Xj координата начальной точки Р1 прямолинейной траектории, Xj, - координата конечной точк Р2; X п-координата точки траектории, в которой движущаяся часть находится в мгновение Т начала п го цикла интерполяции; D х п пр ращение, даваемое х,-, в течение (п-1) цикла интерполяции (это приращение, которое в дальнейшем будет называться позиционным приращением приблизительно пропорционально мгновенной скорости вдоль оси X, так как DT является постоянной).; DxM - константа, установленная пере началом цикла интерполяции, показывгиощая максимальное приращение, до пустимое для координаты х,, т.е. м симальная скорость, допускаемая вдоль оси X. В период всего цикла интерполяци пути между X, и х должно выполнят ся условие линейности РХП Xi-Xi Кроме того, в течение начальной фазы TI (фиг.2) постоянного ускорения, интерполирующий прибор рабо ет . в соответствии со следующими фор мулами Dx(n+l):Dxn + hx х(п+1)хп f Dx(n+l). Последняя определяет, каково должно быть положение х(п+1 движущейся части в конце п-го цикл интерполяции на основе положения Хг, в начале этого цикла. Первая из этих формул определяе ча основании позиционного приращения, использованного в предыдущем цикле интерполяции, каково должно быть прирадение положения (скорост Dx(n-H), чтобы использовать его в настоящем п-ом цикле интерполяции. Так как hx константа, то ясно, что таким образом, обеспечивается прохождение сегмента х, -х траектории с постоянным ускорением, пропор циональным hx. Кроме того, в начальной фазе Т, выполняются следующие дополнительные операции, необходимые для опре деления моментов, когда имеют мест изменения ускорения на графике фиг.2. . )хп 1л 20хп40хп Рхп Xj -HnaRun . Первая из этих операций определя величину расстояния хп-х, , проходимого движущейся частью от на чала Xi данного сегмента траектории до конца (п-1) цикла интерполяции; это ра с;стояние получается из рассто ния i Dxn, пройденного с конца (п-2) цикла интерполяции и до позиционного приращения Dxn, которое им ет место в (п-1) цикле интерполяции Следующая операция определяет величину мнимого расстояния Р„, равijpro ранее упомянутому расстоянию S Dxn xn-x ,увеличенного на последнее приращение Dxn. Величина Rxn равна оставшемуся расстоянию, которое движущаяся часть должна еще пройти до достижения конечной точки. Кроме того, в течение всей фазы Т постоянного ускорения в каждом цикле интерполяции выполняется проверка условия, что мгновенная скорость не превышает максимально допустимой скорости DxM. Аналогичные операции выполняются в интерполирующем приборе, относительно оси Y. Начальная фаза Т постоянного ускорения определяет конец того цикла интерполяции, в котором достигается максимапьная скорость для оси X или дпя оси Y. Более точно, фаза Т определяет конец того цикла интерполяции, в котором были рассчитаны для оси X или для оси Y приращения Dxn или Dyn большие, чем максимально допустимые приращения DxM или DyM. Нужно также отметить, что конечные приращения DxnM и DynM 1«югут превосходить максимальное приращение DxM и DyM на величину, не большую, чем минимальные приращения Rx и hy соответственно, т.е. фаза Т оканчивается при достижении вдоль оси X или вдоль оси Y максимальной скорости, допускаемой для этих осей. В конце фазы Tj суммирование IDxn представляет общее расстояние х., которое пройдено вдоль оси X с конца цикла интерполяции, в процессе которого была достигнута максимально допустимая скорость или вдоль оси X или вдоль оси Y. Поэтому, расстояние Хд- Xj представляет собой путь, который необходимо пройти дпя того, чтобы достигнуть с постоянным, ускорением максимальной скорости. Величина РхпМ мнимого расстояния Рпх , соответствуюЩ5го расстоянию Хд- х , увеличено, как бЕлло показано, и запоминается в соответствующем регистре с конца фазы Т, и сохраняется в нем. За начальной фазой Tj постоянного ускорения следует фаза Т Постоянной скорости (фиг.2), в течение которой движущаяся часть продолжает перемещаться со скоростью, равной DxnM для оси X и DynM дпя оси Y,которую она достигает в конце фазы Т. В течение фазы Т интерполирующий прибор выполняет следующие операции: X (П4-1) xn+DxnM Rxn Rxn РхпМ . в первой формуле позиционное приащение в очередном цикле интерполяции является постоянным и равным DxnM; тем самым, скорость становитс постоянной.. Наравенство используется для про верки в каждом цикле интерполяции условия, что оставшееся расстояние Rxn до конечной точки х меньше заданного, хранящегося в регистре. Фаза Tj постоянной скорости заканчивается после выполнения этого усл вия. За фазой Tj, постоянной скорости следует (фиг.2) фаза Tj постоянного замедления, в течение которой движу щаяся часть замедляется с той же абсолютной величиной ускорения (пропорциональной hx и НУ, соответственно для двух осей), уже использованной в фазе ускорения Т. В течение фазы Tj интерполирующий прибор выполняет следующие операции : Dx(n+l)Dxn - hy X (n+1)xn + Dx(n+1) Dxn , 1 микрона. Неравенство используется для того, чтобы установить конец фазы пос тоянного замедления. Для установления начала замедления выполняется рассмотрение мнимого расстояния РхпМ, увеличенного ра описанным образом, относительно рас стояния, пройденного во время ускор рения, вместо рассмотрения последне в конечной точке, для того,чтобы иметь гарантию того, что движущаяся часть не придет в процессе замедления в конечное положение х, у со скоростью, отличной от нуля, и поэт му ошибочно продолжит движение за точку прибытия Р., . Этот, случай, который не имел бы последствия в пози ционнь1х устройствах типа от точки к точке в этом варианте должен бы исключен, так как необходимо управлять всей траекторией, например, в случае поперечного движения в целях нарезки профиля. Нужно отметить,что для того, чтобы избежать этого случая, недостаточно прерьгеать цикл интерполяции и дать приказ на остановку движущейся части как только расстояние х - хп станет меньшим, чем требуемое приближение, так как может случиться, что скорость, достигнутая при замедлении, в этот момент остается столь высокой, что оставшееся расстояние является недо таточным для -остановки. С другой стороны, для того, чтобы избежать этого случа;, необходимо иметь для замедления расстояние, равное тому, которое было пройдено в течение ус корения, плюс дополнительно запасное расстояние, достаточное для остановки и, так как в течение фазы Т постоянной скорости координата xh увеличена на приращение DxnM, это дополнительное расстояние не может быть меньше DxnM. Так как замедление начинается в гот момент, когда расстояние от конечной точки PJ. становится меньше, чем расстояние, пройденное в течение ускорения, плюс DxnM, движущаяся часть машины будет иметь время, для того, чтобы выполнить замедление до прохождения конечной точки PJ, . Более конкретно, она не может достигнуть конечной точки Pj, с погрешностью,, большей, чем DxnM или DynM, соответственно, для координат X и Y. . Поэтому необходимо, чтобы фаза постоянного замедления не продолжа лась до тех пор, пока не будет иметь место остановка, а прерывалась до остановки и заменялась более медленным движением приближени.я к конечной точке PJ . Нужно иметь возможность осуществить это движение приближения с постоянной скоростью, пока оставшееся расстояние Х2-хп (или ) достигает предельнойвеличины, достаточной малой, чтобы гарантировать требуемую точность уста- . новки и прекращения интерполяции с этбй точки. ,, Если скорость движения приближения выбрана слишком низкой, то теряется много времени. С другой стороны, если скорость выбрана слишком высокой, может .случиться, что конечная точка будет цройдена при движении приближения. :.Последний упомянутый недостаток возникает как вследствие инерции движ ;щейся части, которая не даст возможность осуществить остановку закороткое время, сразу, как только подтверждается, что остаточное расстояние меньше, чем заранее выбранный предел, так и вследствие того, что позиционное приращение Dxn, выведенное в цикле интерполяции, больше чем требуемая точность установки, так что может случиться, что в процессе одного цикла интерполяции, с начала которого движущаяся часть не достигла пока конечной позиции с требуемым приближением движущаяся часть сама пройдет конечную точку, не имея возможности избежать этого перерегулирования. На фиг. 2 показано решение этой проблемы, в которой движение приближения разделено на две фазы Иц и Ту . В течение фазы 4 интерполирующий прибор выполняет следующие операции: х(п+1) хп + D;;;nf XQ - хп -с 16 микрон Постоянные позиционные приращения равны приращению Dxnf, достигнутому в конце фазы замедления, что достигается при первом осуществлении неравенства, определяющего конец фазы Tj . Конец фазы Т, определяется по приведенному неравенству.
В течение фазы Ту интерполирующий прибор выполняет операции: X (n+l)хп + hx Xj - хп . 1 микрона. Выбор величины скорости в соответствии с данным соотношением, хотя не обязателен, но желателен, Неравэнство определяет конец фазы Tj и конец всего цикла интерполяции.
Поэтому ясно, что фаза Tj заканчивается, когда в течение замедления достигнута достаточно низкая скорость, например, соответствующая позиционному приращению 1 микрон, полученному в цикле интерполяции; фаза Т;, кончается, когда движущая часть подходит на заранее определенное расстояние от конечной точки Pj; указанное расстояние, например, может быть равным 16 микрон; и конечная фаза TS заканчивается, когда движущаяся часть прибыла на расстояние от конечной, точки, меньшее, чем заданная точность (которая принята, равной 1 микрону).
Как только движущаяся часть подходит .на расстояние, меньшее, чем 1 микрон (требуемая точность) до конечной точки, интерполяция прерывается и движущаяся часть может быть остановлена и зафиксирована в указанном положении любыми известными средствами, например тормозной системой или механическим зажимом. Однако, предпочтительно, чтобы движущаяся часть удерживалась в этом положении установочным сервомеханизмом, правляемым постоянными приказами позиционирования. С этого момента приказы позиционирования могут быть1 составлейы из последних координат, рассчитанных в течение интерполяции или предпочтительно чтобы они включили в себя координаты конечной
точки Pj, которые посылаются программирующим прибором.
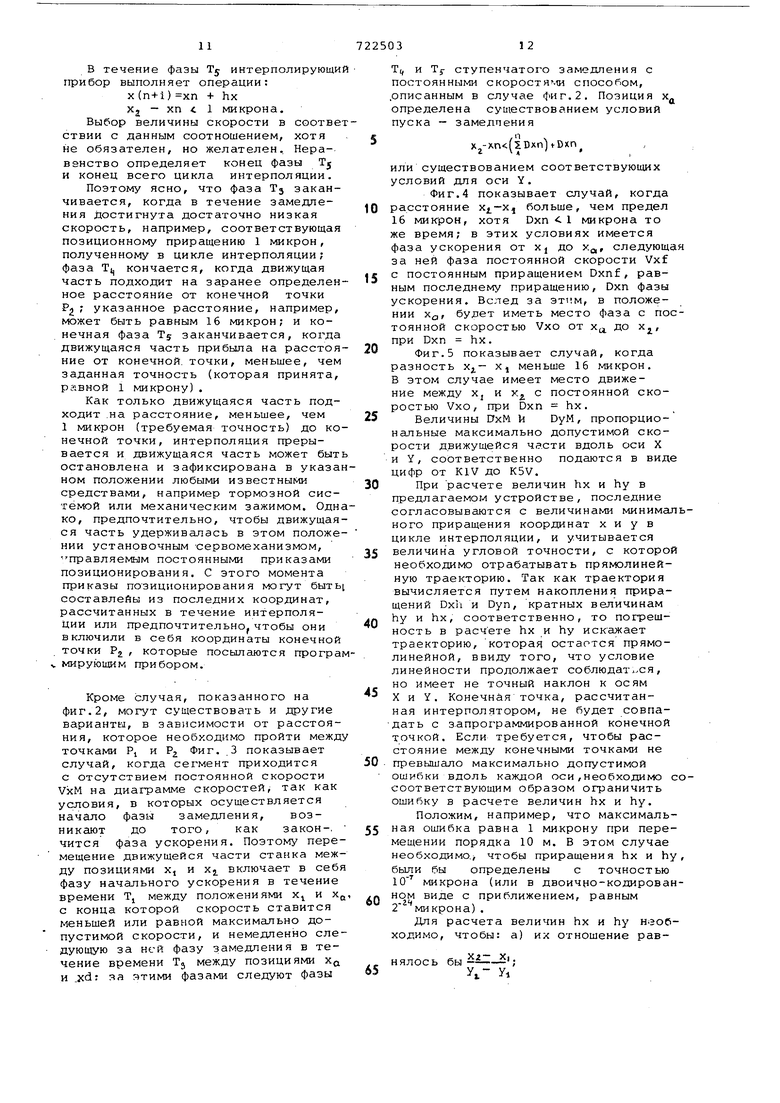
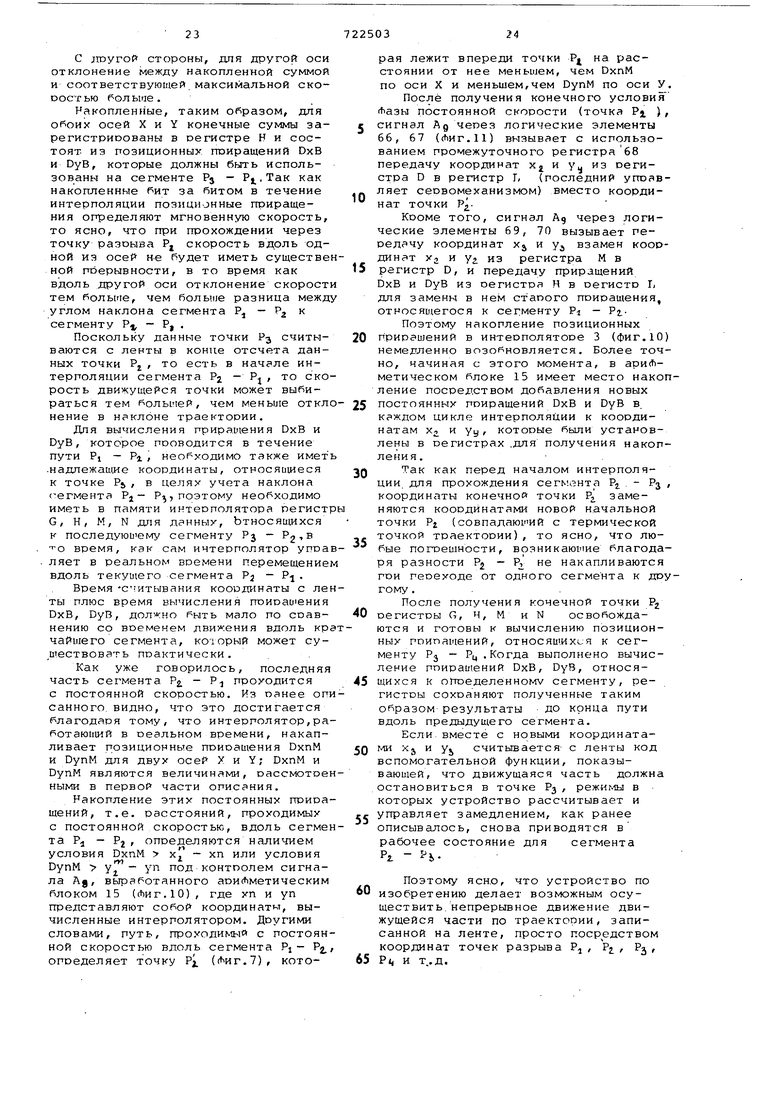
Кроме случая, показанного на фиг.2, могут существовать и другие варианткл, в зависимости от расстояния, которое необходимо пройти между точками PI и Pj Фиг. 3 показывает случай, когда сегмент приходится с отсутствием постоянной скорости xM на диаграмме скоростей, так как словия, в которых осуществляется ачало фазы замедления, возикают до того, как закон-. чится фаза ускорения. Поэтому переещение движущейся части станка межу позициями X, и Xj включает в себя фазу начального ускорения в течение ремени Tj между положениями х и Хц, конца которой скорость ставится меньшей или равной максимально допустимой скорости, и немедленно следующую за ней фазу замедления в течение времени Tj между позициями XQ и .xd: яа этими фазами следуют фазы
Ti, и Tj- ступенчатого замедления с постоянными скоростями способом, .описанным в случае Фиг.2. Позиция х определена существованием условий пуска - замедпения
Xj-An(SDxri)tDi(n
или существованием соответствующих условий для оси У.
Фиг.4 показывает случай, когда расстояние больше, чем предел 16 микрон, хотя Dxn 1 микрона то же время; в этих условиях имеется фаза ускорения от Xj до Хд,, следующа за ней фаза постоянной скорости Vxf с постоянным приращением Dxnf, равным последнему приращению, Dxn фазы ускорения. Вслед за этим, в положении XQ, будет иметь место фаза с постоянной скоростью Vxo от Хц до х, при Dxn hx.
Фиг.5 показывает случай, когда разность X, меньше 16 микрон. В этом случае имеет место движение между Xj и х с постоянной скоростью Vxo, при Dxn hx.
Величины DxM h DyM, пропорционапьные максимально допустимой скорости движущейся части вдоль оси X и Y, соответственно подаются в виде цифр от K1V до K5V.
При расчете величин hx и hy в предлагаемом устройстве, последние согласовываются с величинами минималного приращения координат х и у в цикле интерполяции, и учитывается величина угловой точности, с которой необходимо отрабатывать прямолинейную траекторию. Так как траектория вычисляется путем накопления приращений Dxii и Dyn, кратных величинам by и hx, соответственно, то погрешность в расчете hx и hy искажает траекторию, которая остается прямолинейной, ввиду того, что условие линейности продолжает соблюдат.-ся, но имеет не точный наклон к осям X и Y. Конечная точка, рассчитанная интерполятором, не будет совпадать с запрограммированной конечной точкой. Если требуется, чтобы расстояние между конечными точками не превышало максимально допустимой ошибки вдоль каждой оси,необходимо ссоответствуюшим образом ограничить ошибку в расчете величин hx и hy.
Положим, например, что максимальная ошибка равна 1 микрону при перемещении порядка 10 м. В этом случае необходимо., чтобы приращения hx и hy
были бы
определены
точностью
10 микрона (или в двоично-кодированном виде с приближением, равным 2 микрона) .
Для расчета величин hx и hy необходимо, чтобы: а) их отношение рав... нялось бы-;
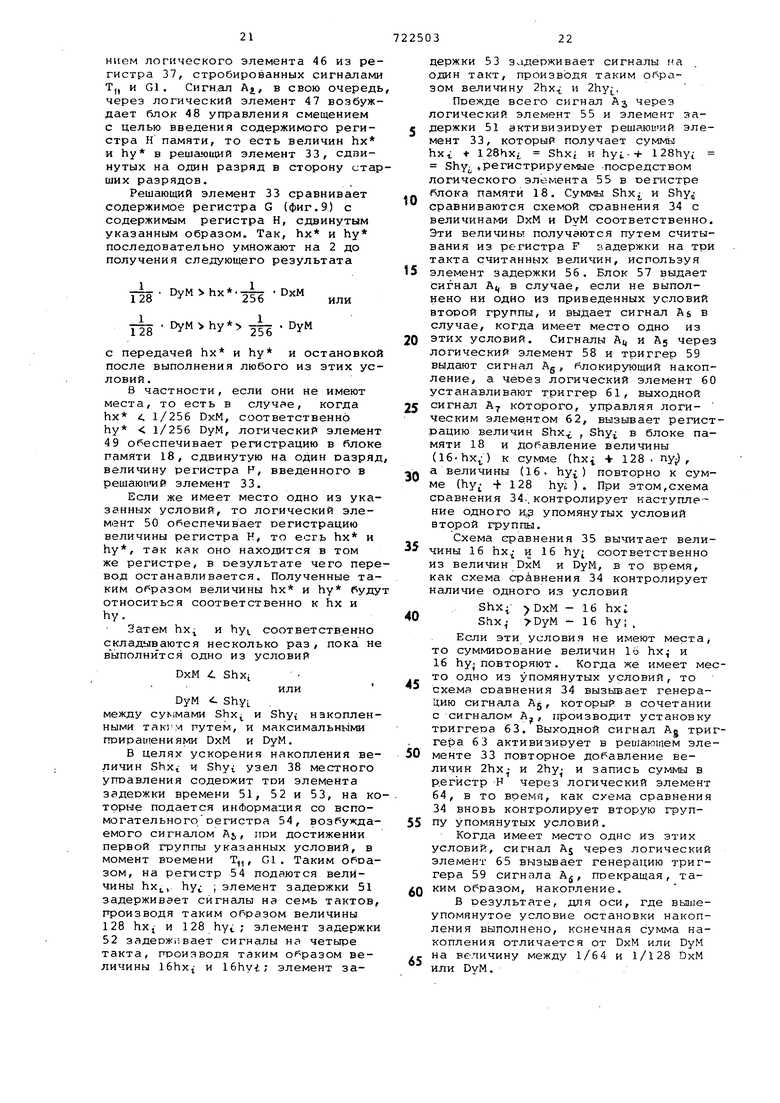
У б)указанные величины определяли бы с точностью, достаточной, чтобы обеспечить угловую точность , заданную для данной траектории в)указанные величины не должны превышать величину, соответствующую максимально допустимому ускорению. Вышеупомянутая процедура осуществля ется следующим образом. Подсчитываются величины (х - х )Н и ( - ) Н,где Н-безразмерная констан та,равная степени 2,и устанавливаемая переключателем станка,а (х - х)Н и ( ,- ) Н должны быть меньше максимального приращения скорости (ускоре ния) ,допустимого для станка. После этого величины Xj. - х)Н и (YJ, - у)Н умножаются и удваивают ся до тех пор, пока одна из них не достигнет числа, соответствующего максимальному ускорению При этом выполняются условия а), б) ив). Устройство, реализующее изложенные принципы, получает информацию с ленты 1, несущей записанную прог рамму программирующего блока 2. счи тывающего информацию с ленты. Предлагаемое устройство управления вклю чает в себя также интерполятор 3 и цифроаналоговый преобразователь 4, который управляет сервомеханизмами 5,6,7, применяемыми для перемещения движущейся детали вдоль осей X, Y и Z соответственно. Програм мирующий блок 2 связан с интерполятором 3 посредством линии связи 8. Программирующий блок 2 (фиг.10) содержит блок ввода 9, соединенный со входом кодирующего блока 10, сое диненного, в свою очередЬр с подающим входом блока управления 11. Распределитель тактов 12 присоедине к блоку управления 11.Счетчик 13 присоединен к блоку ввода 9 и к блоку 10. Блок управления 14 програм мирующего блока присоединен к блоку ввода к счетчику 13, Работа устройства управления вкл чает в себя первый период, в течени которого блок управления 11 подает в интерполятор 3 указанные ранее да ные, т.е. координаты Xj и у конечной точки PJ траектории и максималь ные скорости DxM и С)уМ. В течение этого периода движущаяся часть неподвижна в начальной точке Pj. Затем следует второй париод, в течение которого движущаяся часть остается неподвижной, программирующее устройство находится в нерабочем состоянии, а интерполятор 3 осуществляет расчет величин hx и hy (при ращение скоростей) на основе ранее указанных принципов. Затем следует третий период, в течение которого имеет место надлежащая интерполяция в то время, как программирующий бло остается в нерабочем состоянии. В т (ние третьего периода интерполятор 3упрзвля2 7- р.;: ;льном ьремени пере мещение двику-де ся части. Для : K-oc;au iKfi вдоль каждой из осей ста5ка л-:О;:;ет кспсльзоваться отдельный цифроанслогоный преобразователь 4, на которого поступают цифропье сигналы, выработанные интерполятором 3. Выходной аналоговый сигнал преобразсваогеля 4 управляет двикениек подЕиглксй части станка здоль соответствующей оси. Может быть использован и один преобраэоБРдтель для всех oces : перемещения. Е этом случае необходимо переда: ать сигналы сообидения для различных осей перемещения на основе техники с временного разделения, т.е. сигналы, относящиеся к одинаково - периоду времени, расп:ределяю::ся по ра.: 1личным осям с разным промажут к аг--ги времени, Это ск;.цзол;;ческ;; отображено на фиг. 6, где показаны три пары переключателей, включающееся перкодическн, чтобы питать цифроаналоговый преобразователь 4и серЕОмоторь: 5,б,7„ Интерполятор 3 включает в себя замкнут.ъ:й контур,- содержащий арифме;тический блок 15, присоединенный к регистру записи 16 к к регистру считывания 17 . Регистры ib к 17 присоединены соответственно к входу и выходу блока памяти 18 посредством комг тутирующих логич:е :;ккх элементов 19 и 20. Выход блока памяти-; 18 лрисоединен к распределктелнз тгкгоз 12 (блок памяти ма гки т ос т ри ки,:: о к ко го типа, и меющи и задержку 2, 4,, миллисекун,п,Ыг может содержать максиг.-г;/.: 2400 бит при длительности такта 1 rv-мкрос.екунда) , Блок управления интерполятором 21 связан с регистраугп 16,. 17, с блоком Бззода 9 и арифметическим блоком 15. Выход арисрметического блока 15 присоеД11нен к входу шеобразователя информации 3 параллельную форму 22 через ком г/тиру;0111ий логический элемент 23, причем Bfcrxcj; преобразователя 22 соединен со вкодо .- цкфроаналогового преобразователя 4, Интерполятор 3 управляется сигналаг.-м распределителя тактоЕ 12,, позволяюйщмк определить номер разряда каждого бита, появляющегося на выходе б л о к г п а м я т и 18 , Б цанном примере в магиитострикционнок naMiiTK циркулирует 2160 бит информации,- что занимает 2160 микросекунд из 2.4 MTij-шисекукд действительной выдержки 5ра;.гени, Распрэделитель тактов 12 приводится в действие от первого бита, появляющегося на выходе блока памят.и 18 к когда он просчитывает 2160 двоичных, энакоз, вырабатывается сигнал Стоп Ч останавливаюший устройство. Для каждой оск блок памяти 18 содержит 12 регистров АЛЗ.С . .N по 50 двоичных разрялов каж,цый ,
всего 3 X 12 X 60 2160 двоичных разрядов.
Расположение двоичных разрядов дл каждой оси будет DEOOA; DEOOB; DEOOC. DEOON;DE01A;DE01B;DE01C. . , ;DEO IN;. . .DE59A, DE59B, DE59C, DE59N. Три группы из 12 X 60 бит, расположенные таким образом и относящиеся к трем осям, находятся в линии задержки одна за другой.
Способ, по которому двоичные знаки различных регистров устанавливсцотся, описан более подробно.
Счетчик разрядов 24, содержащийся в распределителе тактов 12, считает от 1 до 60, включая сигналы , причем каждый сигнал имеет период 12 МКС. Для каждого из 12 регистров памяти сигналы DEOO-DE5 определяют 1-й, 2-й,..., 60-й бит.
Разряды от DE01 до DE056 используются для предоставления чисел от микрон до. 2 микрона (т.е. в десятичной форме величины от 10 до 10 микррна) . Поэтому, положение, определяемое DE33, соответствует величине, равной 1 микрону. Эти 56 разрядные слова обрабатываются интерполятором 3.
С другой стороны, данные о координатах, вводимые программирующим блоком- 2, содержат только 24 разряда, представляюшие величины от 1 микрона до 10 микрон. При операции ввода данных в память через устройство ввода 9 указанные 24 бита при помощи счетчика 24 дополняются нулями ;: соответствующим о( разом располагаются. Например (фиг. 12 и фиг. 13) 24 бита X 2 (представляющие величины от 1 микрона до 2 микрона) вводятся в регистр D в двоичные разряды DE33-DE56. Аналогично, 24 бита, представляющие величину максимального приоащения (максимально допустимой скорости) и которым соответствуют величины От 2 микрона до 2 микрона, вводятся в регистр В в разряды DE20-DE43.
Очевидно, что в случае, когда интерполятор применяется для управления станком, такой диапазон скорости чрезмерен, и для нормального использования достаточно 14 значащих двоичных разряда от 30 до 43, представляюидах величины максимального приращения между 2 микрона и 2 микрона; принимая во внимание, что выдача координаты из интерполятора имеет место каждые 5 миллисекyндJдиапазон изменения скорости лежит в диапазоне от 1,4 мм в минуту до 12,288 м в минуту, чего вполне достаточно для любых встречающихся применений.
Разряд DE57 использован для хранения знака числа. Более точно, этот разряд применяется для различия полпжительного и дополнительного числа
Разряд DE58 используется д.пя накопления переносов.
Разряды DE59 и DECOO остаются свободными во всех регистрах памяти и действуют как разделяюи(ие разряды между регистрами различных осей, таким образом, избегается перенос с одной оси на соседнюю ось.
Сначала записывается в память вся информация, относящаяся к оси X (всего 12 X 60 720 бит), затем к оси Y и, наконец, к оси Z.
Счетчик 24 повторяет три раза считывание 60 двоичных знаков для каждого адреса X,Y,Z. Время, относящееся к трем адресам, определяется тремя сигналами iNiC, iNiP, iNAZ,KO торые генерируются вторым счетчиком 25, управляемым счетчиком разрядов 24.
Третий счетчик 26, управляемый сигналом конца отсчета времени подачи информации, триводит в действие свои выходные сигналы CiRi, CiRi и поэтому период сигнала CiRi равен двум циклам информации в блоке памяти 18, и этот период определяет продолжительность цикла интерполяции DT.
Как видно из схемы внешнего вычислительного блока, память эквива лектна устройству из шести замкнутых в параллель сумматоров A,C,E,S,. I и М плюс шести других замкнутых в параллель сумматоров В, D, F, Н, L и N, имеющих . входы и выходы общие с первыми шестью сумматорами, соответственно, и общую фазу по отношению к первым шести сумматорам.
Четвертый счетчик 27, получающий сигналы от генератора 28, выдает в циклической последовательности тактовые импульсы на шести выходах Т10- Т15 с периодом, равным 1 микросекунде. Бинарный счетчик 2:, управляемый сигналом Т10, имеет два выхода G1 и G1, определяющие два различных цикла счетчика 27 с периодом 12 микросекунд, причем сигнал G1 приводит в действие счетчик 24. Поэтму пара сигналов счетчика 27 и счетчика 29 определяет один из сумматоров А - М. На фиг. 9 показана пара сигналов, определяющая каждый сумматор блока памяти 18.
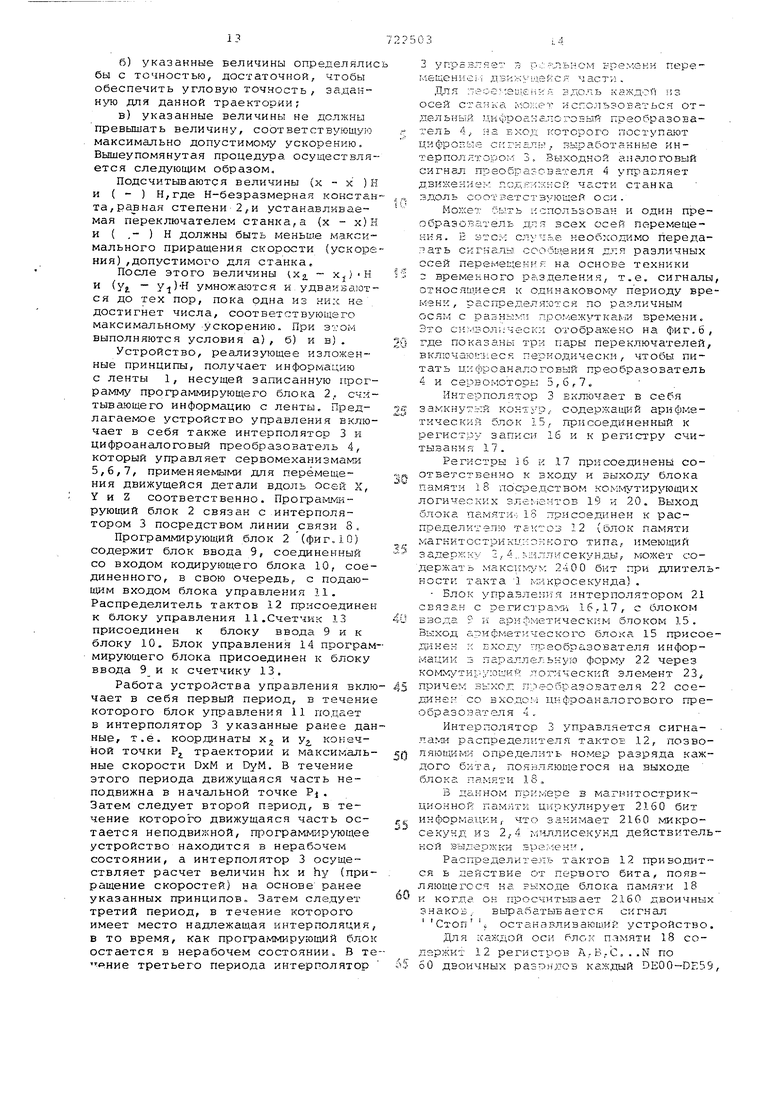
Фиг.8 относится к расположению различных величин в регистрах памяти в течение фазы ввода, в то время как фиг.9 иллюстрирует расположение информации в регистрах памяти в течение фазы вычисления. Регистры памяти работают следующим образом по отношению к оси X.
Программирующий блок 2 может обеспечить два альтернативных режима, в первом из которых блок ввода 9 вводит данные в блок пам-яти 18, а вовтором - арифметический блок 15 производит интерполяцию.
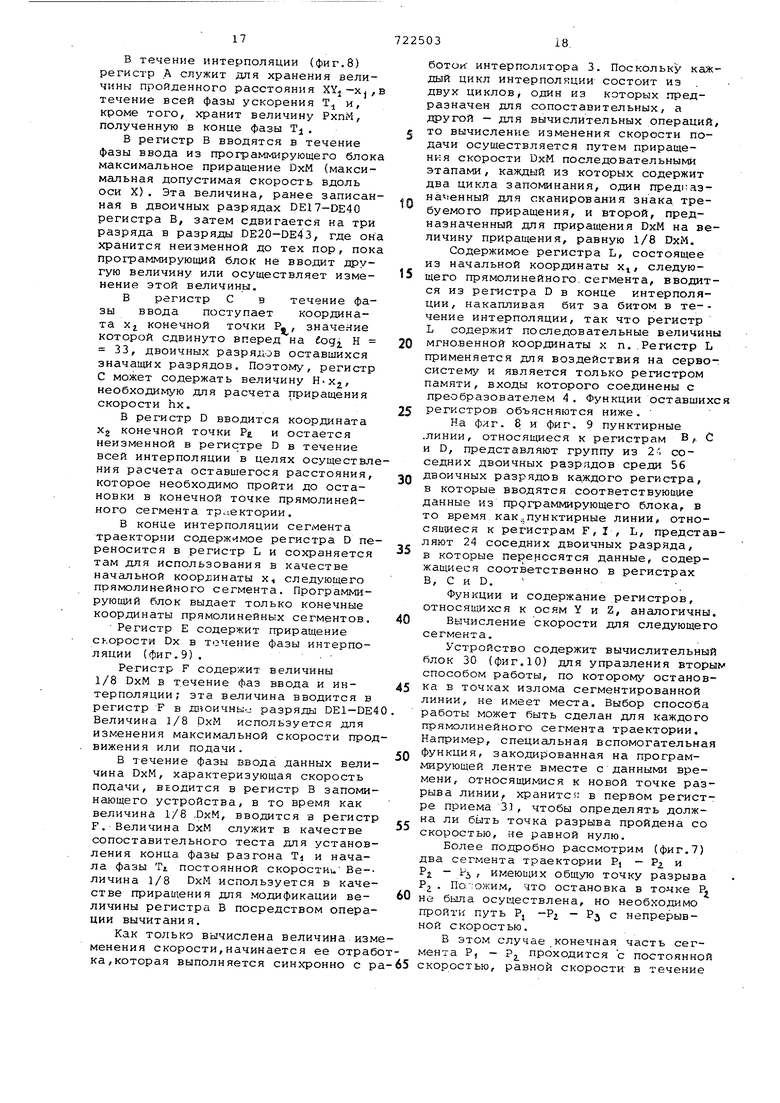
В течение интерполяции (фиг.8) регистр А служит для хранения величины пройденного расстояния XYj-х,в течение всей фазы ускорения У и, кроме того, хранит величину РхпМ, полученную в конце фазы Т.
В регистр В вводятся в течение фазы ввода из программирующего блока максимальное приращение DxM (максимальная допустимая скорость вдоль оси X). Эта величина, ранее записанная в двоичных разрядах DE17-DE40 регистра В, затем сдвигается на три разряда в разряды DE20-DE43, где она хранится неизменной до тех пор, пока программирующий блок не вводит другую величину или осуществляет изменекие этой величины.
В регистр С в течение фазы ввода поступает координата Xj конечной точки Р., значение которой сдвинуто вперед на tog Н 33, двоичных разрядов оставшихся значащих разрядов. Поэтому, регистр С может содержать величину Н-х, необходимую для расчета приращения скорости hx.
В регистр D вводится координата Хз конечной точки Pj. и остается неизменной в регистре D в течение всей интерполяции в целях осуществления расчета оставшегося расстояния, которое необходимо пройти до остановки в конечной точке прямолинейного сегмента траектории.
В конце интерполяции сегмента траектории содерЖ11Мое регистра D переносится в регистр L и сохраняется там для использования в качестве начальной координаты х, следующего прямолинейного сегмента. Программирующий блок выдает только конечные координаты прямолинейных сегментов.
Регистр Е содержит приращение скорости DX в точение фазы интерполяции (фиг.9).
Регистр F содержит величины 1/8 DxM в течение фаз ввода и интерполяции; эта величина вводится в регистр F в D oичны.J разряды DE1-DE4 Величина 1/8 рхМ используется для изменения максимальной скорости продвижения или подачи.
В течение фазы ввода данных величина DxM, характеризующая скорость подачи, вводится в регистр В запоминающего устройства, в то время как величина 1/8 .ОхМ, вводится в регистр F. Величина DxM служит в качестве сопоставительного теста для установления конца фазы разгона Ti и начала фазы Ti постоянной скорости Be-личина 1/8 DxM используется в качестве приращения для модификации величины регистра В посредством операции вычитания.
Как только вычислена величина измменения скорости,начинается ее отрабка, которая выполняется синхронно с р
боток интерполятора 3. Поскольку каждый цикл интерполяции состоит из двух циклов/ один из которых предразначен для сопоставительных, а другой - для вычислительных операций, то вычисление изменения скорости подачи осуществляется путем приращения скорости DxM последовательными этапами, каждый из которых содержит два цикла запоминания, один предиазна 1енный для сканирования знака требуемого приращения, и второй, предназначенный для приращения DxM на величину приращения, равную 1/8 DxM.
Содержимое регистра L, состоящее из начальной координаты х, следующего прямолинейного, сегмента, вводится из регистра D в конце интерполяции, накапливая бит за битом в те-чение интерполяции, так что регистр L содержит последовательные величины мгновенной координаты х п. .Регистр L применяется для воздействия на сервосистему и является только регистром памяти, входы которого соединены с преобразователем 4. Функции оставшихс регистров объясняются ниже.
На флг. 8 и фиг. 9 пунктирные .линии, относящиеся к регистрам В,. С и D, представляют группу из 2-. соседних двоичных разрядов среди 56 двоичных разрядов ка.ждого регистра, в которые вводятся соответствующие данные из программирующего блока, в то время как.пунктирные линии, относящиеся к регистрам F, I , L, представляют 24 соседних двоичных разряда, в которые пepef ocятcя данные, содержащиеся соответственно в регистрах В, С и D.
Функции и содержание регистров, относящихся к осям Y и Z, аналогичны.
Вычисление скорости для следующего сегмента.
Устройство содержит вычислительный блок 30 (фиг.10) для управления вторы способом работы, по которому остановка в точках излома сегментированной линии, не имеет места. Выбор способа работы может быть сделан для каждого прямолинейного сегмента траектории. Например, специальная вспомогательная функция, закодированная на программирующей ленте вместе с данными времени, относящимися к новой точке разрыва линии, храните: в первом регистре приема 35, чтобы определять должна ли быть точка разрыва пройдена со скоростью, lie равной нулю.
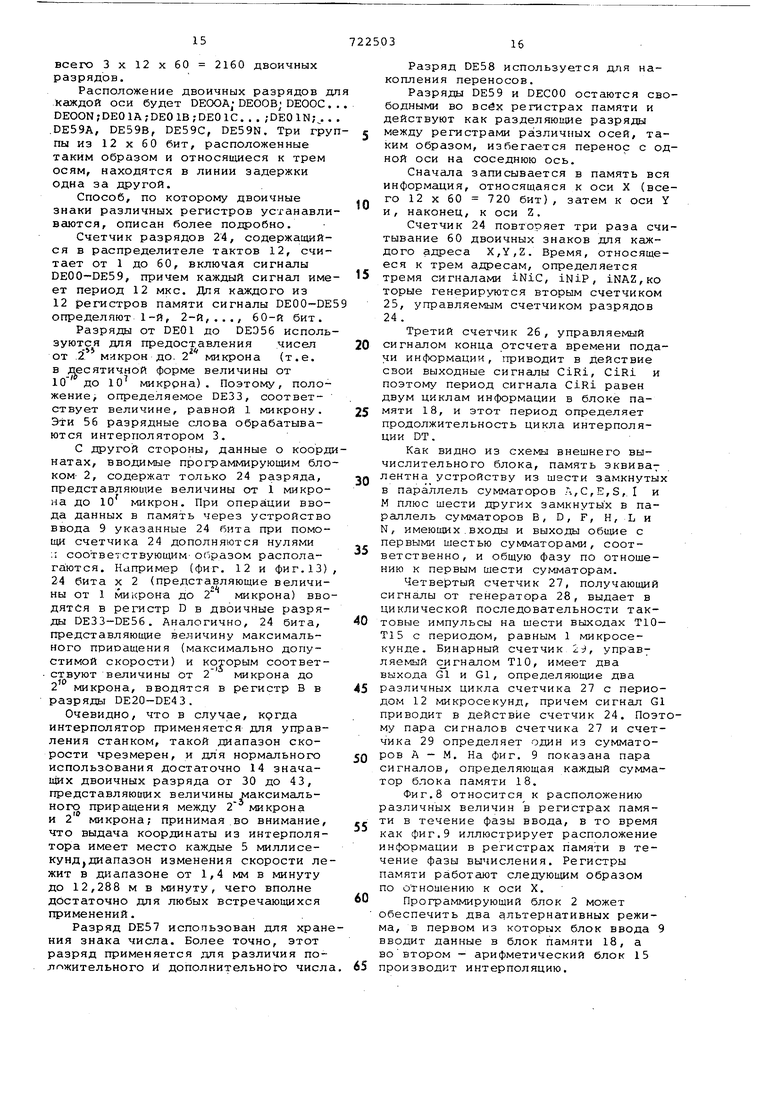
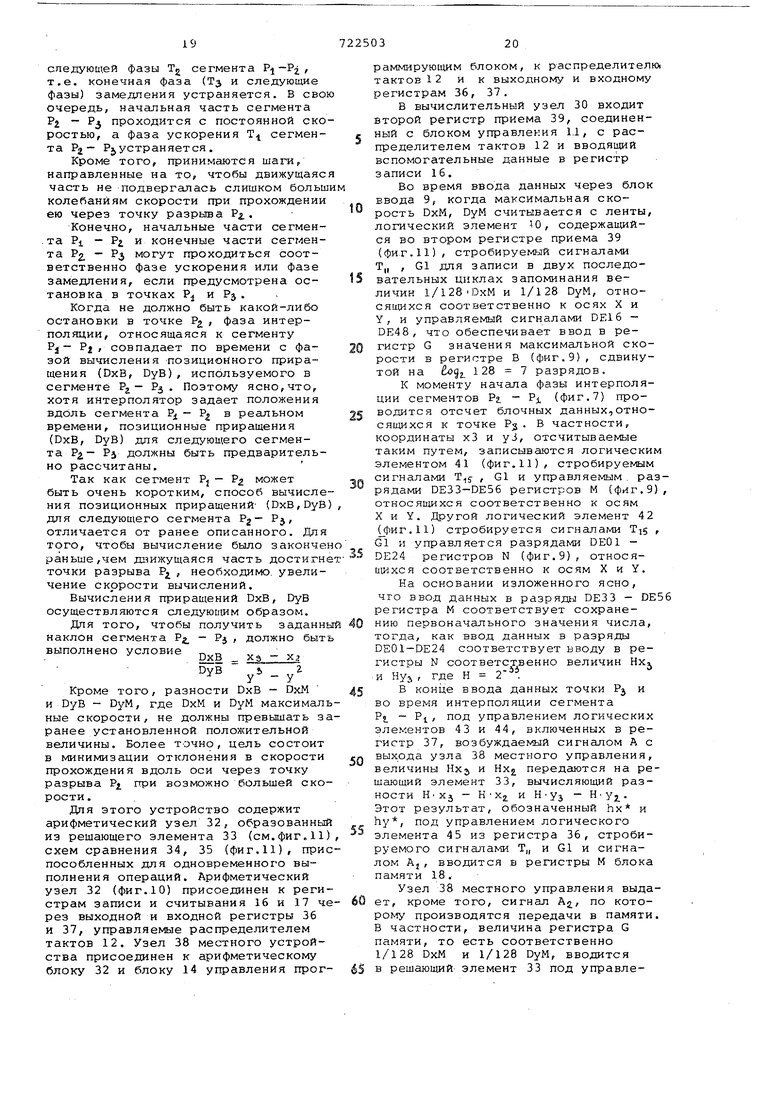
Более подробно рассмотрим (фиг.7) два сегмента траектории Pj - Pi и Pj - РЗ имеющих общую точку разрыва Pj . По.:ожим, Что остановка в точке Р не была осуществлена, но необходимо пройти путь PJ -Р - РЗ с непрерывной скоростью.
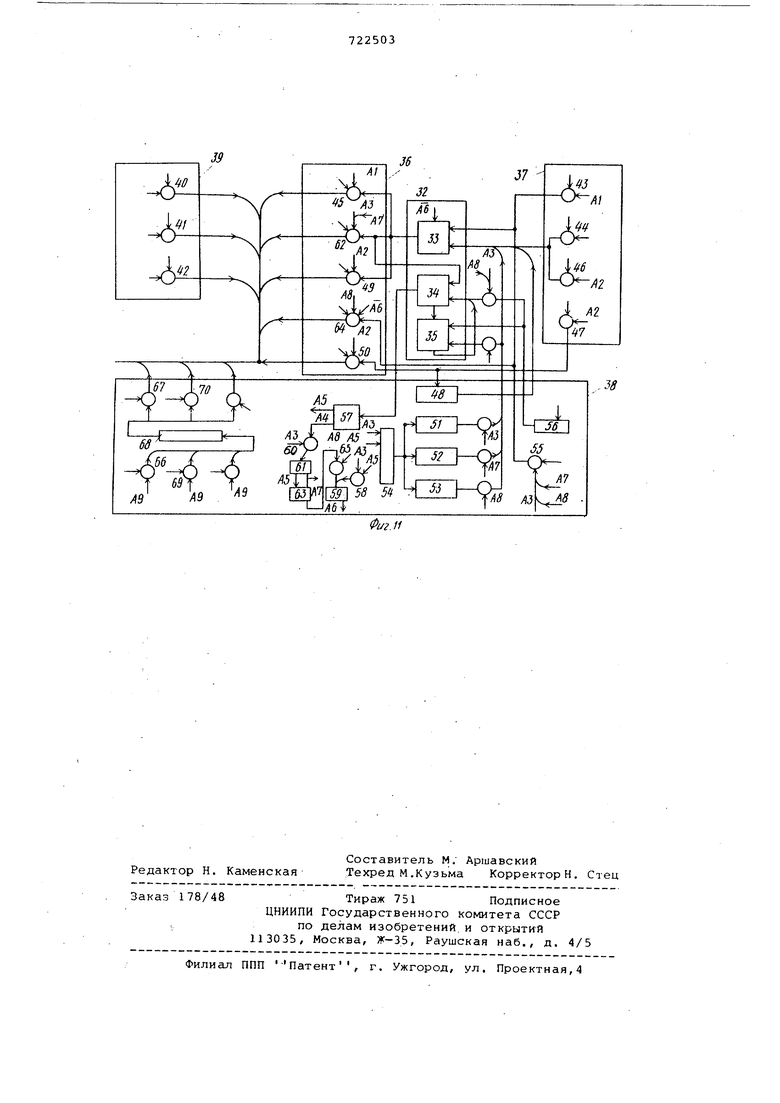
В этом случае .конечная часть сегмента Р, - Р. проходится с постоянной скоростью, равной скорости в течение следующей фазы Tg сегмента т.е. конечная фаза (Tj и следующие фазы) замедления устраняется. В сво очередь, начальная часть сегмента PJ - Р проходится с постоянной ско ростью, а фаза ускорения Т сегмента Pj - Pj устраняет СИ. Кроме того, принимаются шага, направленные на то, чтобы движущаяс часть не подвергалась слишком больш колебаниям скорости при прохождении ею через точку разрьша Р.. Конечно, начальные части сегмен.та PI - Р и конечные части сегмента Pg. - РЗ могут проходиться соответственно фазе ускорения или фазе замедления, если предусмотрена остановка в точках PJ и Pj . Когда не должно быть какой-либо остановки в точке Р, фаза интерполяции, относящаяся к сегменту PI- Pf совпадает по времени с фазой вычисления позиционного приращения (DxB, DyB), используемого в сегменте Pj - Р . Поэтому ясно, что, хотя интерполятор задает положения вдсэль сегмента Р. - Р в реальном времени, позиционные приращения (DxB, DyB) для следующего сегмента Pj должны быть предварительно рассчитаны. Так как сегмент Pj - Р может быть очень коротким, способ вычисле ния позиционных приращений- (DxB,DyB для следующего сегмента Pg- Pj, отличается от ранее описанного. Для того, чтобы вычисление было законче раньше,чем Д1эижущаяся часть достигн точки разрыва Р , необходимо, увеличение скорости вычислений. Вычисления приращений DxB, DyB осуществляются следующим образом. Для того, чтобы получить заданн наклон сегмента Pg - Pj , должно быт выполнено условие х, DyB уЬ г Кроме того, разности DxB - DxM и DyB - DyM, где DxM и DyM максимал ные скорости, не должны превышать з ранее установленной положительной величины. Более точно, цель состоит в минимизации отклонения в скорости прохождения вдоль оси через точку разрыва PJI при возможно большей ско рости. Для этого устройство содержит арифметический узел 32, образованны из решающего элемента 33 (см.фиг.И схем сравнения 34, 35 (фиг.11), при пособленных для одновременного выполнения операций. Арифметический узел 32 (фиг.10) присоединен к реги страм записи и считывания 16 и 17 ч рез выходной и входной регистры 36 и 37, управляемые распределителем тактов 12. Узел 38 местного устройства присоединен к арифметическому блоку 32 и блоку 14 управления прог раммирующим блоком, к распределителю тактов 12 и к выходному и входному регистрам 36, 37. В вычислительный узел 30 входит второй регистр приема 39, соединенный с блоком управления 1.1, с распределителем тактов 12 и вводящий вспомогательные данные в регистр записи 16. Во время ввода данных через блок ввода 9, когда максимальная скорость DxM, DyM считывается с ленты, логический элемент О, содержащийся во втором регистре приема 39 (фи.г.11) , стробируемый сигналами Т„ , G1 для записи в двух последовательных циклах запоминания величин 1/128 |.ОхМ и 1/128 DyM, относящихся соответственно к осях X и Y, и управляемый сигналами DE16 - DE48, что обеспечивает ввод в регистр G значения максимальной скорости в регистре В (фнг.9), сдвинутой на «92- 128 7 разрядов. К моменту начала фазы интерполяции сегментов Рг. - РА (фиг. 7) проводится отсчет блочных данных,относящихся к точке РЗ. В частности, координаты хЗ и yJ, отсчитываемые таким путем, записываются логическим элементом 41 (фиг.11), стробируемым сигналами , G1 и управляемым . разрядами DE33-DE56 регистров М (фиг.9), относящихся соответственно к осям X и Y. Другой логический элемент 42 (Фиг.11) стробируется сигналами T-jj г G1 и управляется разрядами DE01 - DE24 регистров N (фиг.9), относящихся соответственно к осям X и У. На основании изложенного ясно, чго ввод данных в разряды DE33 - DE56 регистра М соответствует сохранению первоначального значения числа, тогда, как ввод данных в разряды DE01-DE24 соответствует вводу в регистры N соответственно величин Нх и Нуа , где Н 2. В конце ввода данных точки Pj и во время интерполяции сегмента Р PI под управлением логических элементов 43 и 44, включенных в регистр 37, возбуждаемый сигналом А с выхода узла 38 местного управления, величины Hxj и Нх передаются на решающий элемент 33, вычисляющий разности HXj - К х и Н УЗ - НУ2. Этот результат, обозначенный hx и hy, под управлением логического элемента 45 из регистра 36, стробируемого сигналами Т,, и G1 и сигналом AJ, вводится в регистры М блока памяти 18. Узел 38 местного управления выдает, кроме того, сигнал А, по которому производятся передачи в памяти. В частности, величина регистра G памяти, то есть соответственно 1/128 DxM и 1/128 DyM, вводится в решающий элемент 33 под управлением логического элемента 46 из регистра 37, стробированных сигналами Т„ и G1. Сигн.ал AJ, в свою очередь через логический элемент 47 возбуждает блок 48 управления смещением с целью введения содержимого регистра Н памяти, то есть величин hx и hy в решающий элемент 33, сдпинутых на один разряд в сторону старших разрядов.
Решающий элемент 33 сравнивает содержимое регистра G (фиг.9) с содержимым регистра Н, сдвинутым указанным образом. Так, hx и hy последовательно умножгиот на 2 до получения следующего результата
1, . -DxM
-1 . -DyM
С передачей hx и hy и остановкой после выполнения любого из этих условий.
в частности, если они не имеют места, то есть в случае, когда hx 1/256 DxM, соответственно hy 1/256 DyM, логический элемент 49 обеспечивает регистрацию в блоке памяти 18, сдвинутую на один разряд величину регистра F, введенного в решаюпий элемент 33.
Если же имеет место одно из указанных условий, то логический элемент 50 обеспечивает регистрацию величины регистра Н, то есть hx и hy, так как оно находится в том же регистре, в оезультате чего перевод останавливается. Полученные таким образом величины hx и hy буду относиться соответственно к hx и hy.
Затем hx и hyi. соответственно складываются несколько раз, пока не выполнится одно из условий
DxM ShXi
или
DyM Shyi.
между суммами Shxj и Shyi накопленными такгм путем, и максимальными приращениями DxM и DyM.
В целях ускорения накопления величин Shxi и Shyi узел 38 местного управления содеожит той элемента задержки времени 51, 52 и 53, на которые подается информация со вспомогательного регистра 54, возбуждаемого сигналом AJ, при достижении первой группы указанных условий, в момент времени Т,, G1 . Таким образом, на регистр 54 подаются величины hx, hyi j элемент задержки 51 задерживает сигналы на семь тактов, производя таким образом величины 128 hxj и 128 hyi; элемент задержки 52 задерж;;вает сигналы на четыре такта, производя таким образом величины 16hXt и 16hyi; элемент задержки 53 задерживает сигналы па один такт, производя таким образом величину 2hx и 2hyi,
Прежде всего сигнсьл Aj через логический элемент 55 и элемент задержки 51 активизирует решаюший элемент 33, который получает суммы hxi + l28hX(, Shxt и hyj. 128hyi Shy «регистрируемые -посредством логического элемента 55 в регистре блока памяти 18. Суммы Shx и Shy
o сравниваются схемой сравнения 34 с величинами DxM и DyM соответственно. Эти величины получаются путем считывания из регистра F задержки на три такта считанных величин, используя
5 элемент задержки 56. Блок 57 выдает Сигнал Ац в случае, если не выполнено ни одно из приведенных условий ВТОРОЙ группы, и выдает сигнал As в случае, козг-да имеет место одно из этих условий. Сигналы А и Ад через
0 логический элемент 58 и триггер 59 выдают сигнал Ag, блокирующий накопление, а через логический элемент 60 устанавливают триггер 61, выходной 5 сигнал А-у которого, управляя логическим элементом 62, вызывает регистрацию величин Shx , Shy в блоке памяти 18 и добавление величины (16hx) к сумме (hxi 128. пу) , а величины (16. hy) повторно к сум0ме (hy 4-128 hyi ). При этом,схема сравнения 34.. контролирует наступление одного и,з упомянутых условий второй группы.
Схема сравнения 35 вычитает вели5чины 16 hx и 16 hy соответственно из величин DxM и DyM, в то время, как схема сравнения 34 контролирует наличие одного из условий
ShX| DxM - 16 hx: DyM - 16 hy; ,
Если эти условия не имеют места то суммирование величин 16 hx и 16 hy; повторяют. Когда же имеет место одно из упомянутых условий, то схема сравнения 34 вызывает генераиию сигнала AJ, который в сочетании с сигналом А, производит установку триггера 63. Выходной сигнал Ag триггера 63 активизирует в решающем элементе 33 повторное добавление величин и и запись суммы в регистр -И через логический элемент 64, в то время, как схема сравнения 34 вновь контролирует вторую группу упомянутых условий.
Когда имеет место одно из этих условий, сигнал Aj через логический элемент 65 вызывает генерацию триггера 59 сигнала А, прекращая, таким образом, накопление.
В результате, для оси, где вы1леупомянутое условие остановки накопления выполнено, конечная накопления отличается от DxM или DyM на величину между 1/64 и 1/128 DxM или DvM.
С jroyroi стороны, для другой оси отклонение между накопленной суммой и соответствующей максимальной скооостью больше.
Накопленные, таким образом, для оРоих осей X и Y конечные суммы зарегистриоованы в регистре Н и состоят из позиционных приращений DxB и DyB, которые должны быть использованы на сегменте Pj - Р.Так как накопленные Рит за битом в течение интерполяции позиционные приращения определяют мгновенную скорость, то ясно, что при прохождении через точку разрыва Pj скорость вдоль одной из осей н-е будет иметь существенной прерывности, в то время как вдоль другой оси отклонение скорости тем болыче, чем больше разница между углом наклона сегмента Р., - Р сегменту Ptf Р
Поскольку данные точки РЗ считываются с ленты в конце отсчета данных точки PJ, то есть в начале интерполяции сегмента Pj - Pj , то скорость движущейся точки может выбираться тем болыпей, чем меныле отклонение в наклоне траектории.
Для вычисления приращения DxB и DyB, которое пооводится в течение пути PI - PI , необходимо также иметь .надлежащие координаты, относящиеся к точке РЬ, в целях учета наклона (егмента Р - Р, поэтому необходимо иметь в памяти интерполятора регистр G, Н, М, N для данных, Ьтносящихся к последуюиему сегменту РЗ - Pj . в -о время, как сам интерполятор управляет в реальном времени перемещением вдоль текущего сегмента Pj PI
Время считывания координаты с ленты плюс время вычисления поирацения DxB, DyB, должно быть мало по сравнению со временем движения вдоль крачайшего сегмента, который может су,щ,ествовать практически.
Как уже говорилось, последняя часть сегмента Pj. - Р проходится с постоянной скоростью. Из панее описанного, видно, что это достигается благодаря тому, что интерполятор,работающий в оеальном времени, накапливает позиционные приращения DxnM и DynM для двух осей X и Y; DxnM и DynM являются величинг11 Ф1, рассмотоенными в первой части описания.
Накопление этих постоянных приращений, т.е. расстояний, проходимых с постоянной скоростью, вдоль сегмента Р., - PI , определяются наличием условия DxnM Xj - хп или условия DynM Yj yii под контролем сигнала AJ, выработанного арифметическим блоком 15 (Лиг.10), где хп и уп представляют собой координаты, вычисленные интерполятором. Другими словами, путь, проходимый с постоянной скоростью вдоль сегмента Pj - Pj,, определяет точку Р ((иг.7), которая лежит впереди точки Pj на расстоянии от нее меньшем, чем DxnM по оси X и меньшем,чем DynM по оси У
После получения конечного условия (азы постоянной скорости (точка Pj, ), сигнал Ад через логические элементы 66, 67 (Лиг.11) вызывает с использованием промежуточного регистра68 передачу координат х и у из регистра D в регистр Г, (последний управляет сервомеханизмом) вместо координат точки Р.
Кроме того, сигнал Ад через логические элементы 69, 70 вызывает передачу координат Xj и у взамен координат Х2 и уг; из регистра М в регистр D, и передачу приращений DxB и DyB из оегистря Н в оегистр I, для замены в нем стапого поиращения, относящегося к сегменту PI - Pj.
Поэтому накопление позиционных приращений в интерполяторе 3 (фиг.10) немедленно возобновляется. Более точно, начиная с этого момента, в арифметическом блоке 15 имеет место накопление посредством добавления новых постоянных приращений ОхВ и DyB в. каждом цикле интерполяции к координатам х и уу, котопые были установлены в пегистрах .для получения накопления.
Так как перед началом интерполяции для прохождения сегмента Pj. - Pj координаты конечной точки Р заменяются координатами новой начальной точки Pi (совпадающий с термической точкой траектории), то ясно, что любые погрешности, возникающие благодаря разности PJ - Р, не накапливаются пои переходе от одного сегмента к другому .
После получения конечной точки Pj регистры G, Ч, М и N освобождаются и готовы к вычислению позиционных ппипащений, относящихся к сегменту РЗ - Рц .Когда выполнено вычисление ппиращений DxB, DyB, относящихся k оггоеделенному сегменту, регистры сохраняют полученные таким образом результаты до конца пути вдоль предыдущего сегмента.
Если.вместе с новыми координатасчитывается- с ленты код
f./m X,
УЬ
вспомогательной функции, показывающей, что движущаяся часть должн остановиться в точке Pj, режимы в которых устройство рассчитывает и управляет замедлением, как ранее описывалось, снова приводятся в рабочее состояние для сегмента PI - ЬПоэтому ясно, что устройство по wO изобретению делает возможным осуществить, непрерывное движение движущейся части по траектории, записанной на ленте, просто поср едством координат точек разрыва Р, , V , Р , 65 Pi( и т..д.
Формула изобретения
1 .Устройство для упра-вления движущимся объектом,содержащее программирующий блок, цифроаналоговый преобразователь, интерполятор, первый и второй выходы которого соединены соответственно с входами цифроаналогового преобразователя и программирующего блока, первый, второй, третий и четвертый входы интерполятора соединены с соответствующими выходами программирующего блока,причем интерполятор содержит блок памяти, регистр записи, регистр считывания, первый, второй и третий коммутирующие логические элементы, арифметический блок, преобразователь информации в параллельную форму, выход которого является первым выходом интерполятора, и блок управления интерполятором, связанный с арифметическим блоком, первый и второй входы блока управления интерполятором соединены с выходами регистров записи и считывания соответственно, третий вход блока управления интерполятором является первым входом интерполятора, соединен с первым входом арифметического блока и соединен с управляющими входами первого, второго .и третьего коммутирующих логических элементов, выходы которых соединены соответственно со входом блока памяти, со входом регистра считывания и -со входом преобразователя информации в параллельную форму, четвертый и пятый входы блока управления интерполяторо являются соответственно третьим и четвертым входами интерполятора, второй вход арифметического блока соединен с выходом регистра считывания, пятый и шестой входы интерполятора соединены со входом регистр записи, выход арифметического, блока соединен со входом регистра записи, со вторым входом третьего коммутирующего логического элемента, третий вход арифметического блока является вторым входом интерполятора, выход регистра записи соединен со вторым входом второго коммутирующего логического элемента, выход блока памяти является вторым выходом интерполятора, выход регистра считывания является третьим выходом интерполятора, о тличаюшееся тем, что, с целью увеличения точности отработки траектории, оно содержит вычислительный блок, первый, второй и третий входы которого соединены с соответствующими выходами программирующего блока, четвертый вход соединен со вторым выходом интерполятора, пятый и шестой входы которого соединены соответственно с первым и вторым выхода1«1и вычислительного блока.
2.Устройство по п.1, о т л ичающеес я тем, что в нем вычислительный блок содержит арифметический узел, узел местного управления, выход которого соединен- с управляющим входом арифметического узла, входной и выходной регистры, первый и второй регистры приема,
5 входы которых соединены с управляющими входами входного и выходного регистров и первым входом узла местного управления и является первым входом вычислительного блока, второй вход которого соединен со вторым вхо0дом второго регистра приема, а третий вход соединен со вторым входом узла местного управления, третий вход которого соединен с выходом входного регистра и с входом арифметического
5 узла, выход которого соединен со входом выходного регистра и четвертым входом узла местного управления, выходы регистра приема и выходного регистра являются первым и вторым вы0ходами вычислительного блока, вход входного регистра является четвертым входом вычислительного .блока.
3.Устройство по ПП.1, 2, о т л ичающееся тем, что в нем
5 арифметический узел содержит решающий элемент/ первую и вторую схемы сравнения, причем выход равенства первой схемы сравнения соединен с первым входом второй схемы сравне0ния, выход решающего элемента соединен со вторым входом первой схемы сравнения и является выходом арифметического узла, выход второй схемы сравнения соединен с первым входом первой схемы сравнения, второй и
5 третий входы второй схемы сравнения являются управляющими входами арифметического узла.
Источники информации, принятые во внимание при экспертизе
0
1.Авторское свидетельство СССР 165604, кл. G 06 F 15/46, 1963.
2.Ommering Rch van Schaenaker сгм, DE Cobka den ofigeta e Rekenmachine voor memericke besturing
5 van gerund-Schaps werktugen. Philips techn tijseker, 1965-1966, W 11,
c. 285-298 (прототип).
/1
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ | 1969 |
|
SU257150A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2010 |
|
RU2436045C1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1709269A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Устройство для линейной интерполяции яркости и дальности сегментов изображений | 1990 |
|
SU1730633A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1996 |
|
RU2109350C1 |
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
Кх«|
Т5
ТИ J5
Г1 иг.З
К
Vxf
VitO
1/хй
То ле k2
X/ Фигц
(
Фиг 5
Х« X
Фи1Л
DfOl
J)DO
J)ft7 HfSO Df2f MS3 XIO Oft/}
D 24Sf33 SeiOJ)E57
DE01
yfij пего 31 , j) DE53
DEOD
в ,H-H2 с л,
I}f57 VE5B DESg
.PuniTZ) /,suxn(Th
ЛхН
-/1
.
1/8 UK H
,xn
,Xn
- /l2SuxH
,hf.hxi, uxB
X3
ФигЗ
