Предлагаемое устройство относится к области автоматики и вычислительной техники и предназначено для автоматизации получения фотонегативов при помощи светового луча. В основе предлагаемого устройства лежит линейно-круговой интерполятор с переключаемой логикой.
Известны устройства для систем управления точными координатными перемещениями, содержащие блок ввода информации, фотосчитывающее устройство, схему обнаружения конца кадра линейно-круговой интерполятор, содержащий регистры, логические элементы, блок переключения знаков координат, блок задания скорости и коммутатор режима работы.
Целью изобретения является расширение функциональных возможностей устройства, сокращение объема вводимой информация и улучшение эксплуатационных хар.актеристик устройства, предназначенного для автоматизации получения фотонегативов при ломощи светового луча.
Предлагаемое устройство отличается тем, что вход накопительного регистра хранения величин смещений по координатам и вход накопительного регистра хранения суммы абсолютных значений перемещений через собирательные схемы лодключены к выходу блока переключения знаков координат интерполятора, а их выходы - ко входам схемы обнаружения конца кадра н через собирательные схемы соединены с соответствующими входами регистров хранения координат начальных точек обработки, а также присоединены через собирательные схемы ко входу буферного регистра и ко входу регистра хранения суммы абсолютных значений перемещений по координатам, выход которого подключен к одному из входов схемы обнаружения конца кацра. Выходы регистров хранения координат начальных точек отработки через собирательные схемы соединены со входом регистра хранения суммы абсолютных значений перемещеНИИ. Входы регистров хранения координат начальных точек отработки соединены через собирательные схемы с выходами реверсивных накопительных регистров интерполятора, управляющие входы всех регистров и вход схемы обнаружения конца кадра присоединены к выходам коммутатора программ -переключений, выход схемы обнаружения конца кадра через собирательную схему подключен ко входу накопительного регистра числа повторений однотипных перемещений.
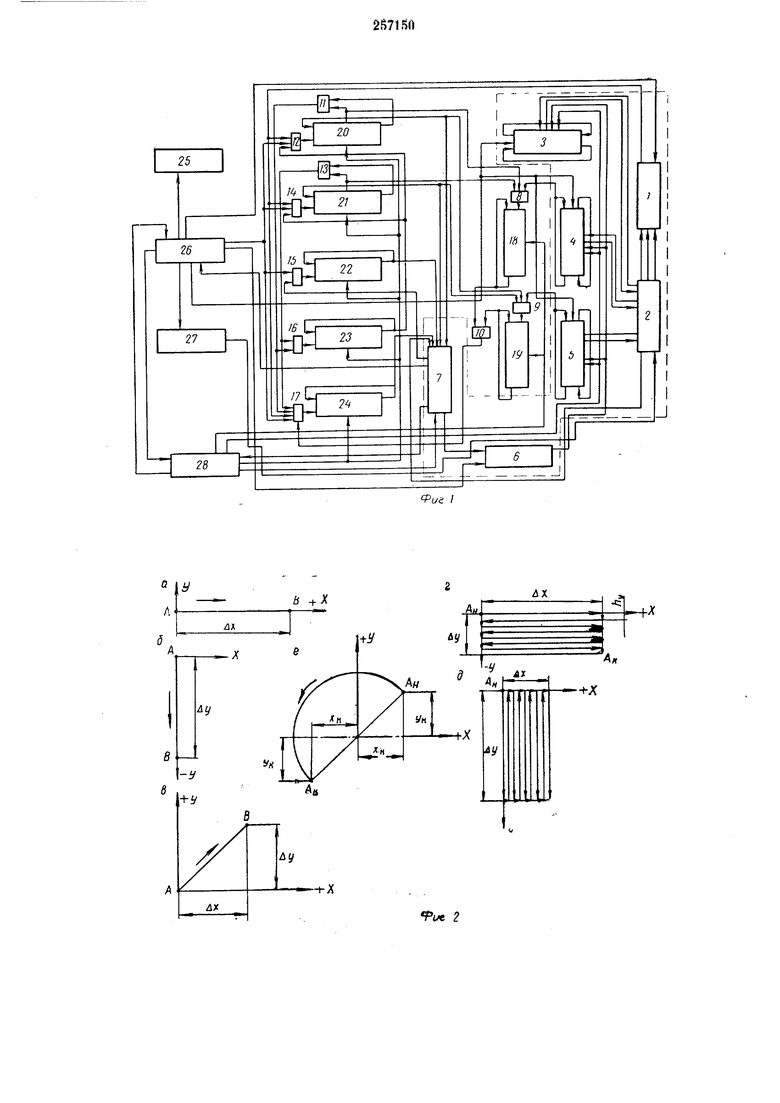
На фиг. 1 показана функциональная схема описываемого вычислительного устройства (ВУ); на фиг. 2 и 3 - графики перемещения по координатам X, У и Z.
лючения знаков координат, блок 2 распределения импульсов по координатам при линейной и круговой иятерполяции, реверсивные накопительные регистры 3-5, коммутатор 6 режима линейно-кругового интерполятора (ЛКИ), схему 7 обнаружения конца кадра, собирательные схемы «ИЛИ 8-17, регистры 18 и 19 хранения координат начальных точек отработки, накопительный регистр 20 хранения величин смещения по координатам, накопительный регистр 21 хранения суммы абсолютных значений перемещений по координатам, накопительный регистр 22 числа повторений однотипных перемещений, буферный регистр 23, регистр 24 хранения суммы абсолютных значений перемещений по координатам, фотосчитывающее устройство 25 с перфоленты, блок 26 ввода информации, блок 27 задания скорости и коммутатор 28 программы переключений.
ВУ имеет три управляемые координаты, две из которых X тл. У предназначены для перемещения оригинала (фотопластины и др.), э третья Z - для плавного изменения диафрагмы световой головки.
ВУ обеспечивает как поочередное, так и одновременное координатное перемещение исполнительного органа; обработку контуров произвольного вида (с линейной и круговой аппроксимацией); максимальную скорость по координатам 0,5 м/мин при цене импульса 0,01 мм; отклонение действительной скорости перемещений от заданной ,не более чем в два раза, независимо от задаваемых геометрических размеров и законов перемещений; задание программы от перфоленты при помощи фотосчитывающего устройства.
Одним из основных узлов ВУ является ЛКИ с переключаемой логикой, имеющей два режима работы: линейный, который использует принцип многоразрядных приращений, и круговой, использующий принцип оценки функции.
ВУ имеет несколько режимов работы для обработки Прямых и наклонных линий, окружностей, площадей различных фигур (прямоугольников, треугольников, секторов окружностей и т. д.), при .помощи которых можно получать практически любой сложности рисунок.
Работу ВУ и взаимодействие ее узлов проследим последовательно на каждом режиме работы.
Перед началом работы все блоки ВУ устанавливаются в исходное состояние.
Для отработки различных линий (первый режим- обработка прямых и наклонных линий) необходимо иметь приращения по координатам X, У Е Z от начальной точки отработки до конечной; направление движения (направление изменения диафрагмы), или знаки отработки; скорость v отработки. Отработка всякого режима начинается с установки необходимой ширины линии (диафрагмы).
ствий: коммутатор 28 устанавливается на отработку прямых и наклонных линий; коммутатор 6 - на линейный режим работы; значение необходимой диафрагмы (щирина лиНИИ), скорости ее установки и знак ее отработки вводятся из блока 26 соответственно в регистр 3 и блоки 27 и 1.
По команде «Пуск, поступающей из блока 26, начинается установка выбранной диафрагмы, которая фиксируется схемой 7, разрешающей блоку 26 ввод данных для отработки линии; приращения по координатам X и У, скорость и знаки, соответствующие участку обработки, вводятся из блока 26 в двоичном коде соответственно в соответствующие реверсивные накопительные регистры, блок 27 и в блок 1 переключения знаков координат. По команде «Пуск, поступающей из блока 26, включается блок 27, и заданная частота, пропорциональная скорости, начинает поступать в блок 2, при этом включается свет (открывается диафрагма световой головки). Блок 2, регистры 4 и 5 и коммутатор 6 обеспечивают получение выходных импульсов из блока 1,
количество которых к концу отработки должно соответствовать установленным перемещениям X и У. Конец отработки фиксируется схемой 7, сигнал с которой разрещает ввод из устройства 25 следующего кадра программы.
Для обработки окружности (второй режим) необходимо знать координаты начальной точки отработки А(Х, У„), абсолютные перемещения Д X и Д г/ -по координатам X и У
AK X + 2R-X, Аг/ + У„,
направление вращения, и знаки отработки, скорость отработки (см. фиг. 2е).
При этой отработке выполняется следующая последовательность действий: коммутатор 28 переводится на второй режим работы; коммутатор 6 устанавливается на круговой режим интерполяции; координаты начальной точки отработки Л„ (Х, У„), скорость, направление вращения и знаки отработки вводятся соответственно в регистры и 5 и блоки 27, 2 н 1; абсолютные перемещения по координатам вводятся последовательно в регистр 24, где .происходит их сум.мирование (сумма х +
+ Дг/ не должна превышать объема накопительного .регистра). По команде «Пуск, поступающей из блока 26, включается блок 27, и заданная частота начинает поступать в блок 2, при этом в случае необходимости происходит
включение света. Регистры 4 и 5, блок 2 и коммутатор 6 обеспечивают получение выходных импульсов из блока 1 по законам, соответствующим движению при круговой интерполяции. Импульсы, выходящие по
координатам X и У из блока /, в дополнительном коде поступают в регистр 24 и тем самым вычитают его содержимое. Конец отработки окружности (дуги) фиксируется схемой 7 и регистром 24.
тий режим) можно вести как вдоль оси X, так и вдоль оси У (см. фиг. 2, г -л д).
Для отработки площадей трямоугольников необходимо знать .величину перемещения вдоль оси, 1по которой ведется отработка, величину смещения (hx или hy), количество щагов, которое необходимо сделать при отработке
уУ
NX --или Ny --|,направление движе X у
кия в начальный момент и скорость отработки.
При отработке вдоль оси X выполняется следующая последовательность действий; необходимые для отработки величины X, hy, N (число однотипных перемещений заносится то, по которому кончается отработка), знаки перемещений и скорость отработки вводятся соответственно в регистры 4, 5 и 22: коммутатор 28 устанавливается на режим - площадь прямоугольника; коммутатор 6 устанавливается на линейный режим интерполяции; по сигналу «iFIycK с блока 26 включаются блок 27 и свет.
После отработки одной координаты происходит автоматическое переключение на работу по другой координате и при .необходимости .производится изменение знаков координат; при отработке (см. фиг. 2, г) меняется знак по координате X, а при отработке (см. фиг. 2,д) - знак по координате У.
В процессе работы со схемы 7 сигналы однотипных перемещений в дополнительном коде .поступают в регистр 22 и производят вычитание из числа, записа.нного в этом регистре гг и производят вычитание из числа, записанного в регистре перед началом работы. Работа продолжается до тех пор, пока регистр 22 и схема 7 не зафиксируют конец отработки площади прямоугольника.
Отработка вдоль оси У аналогична отработке вдоль оси X, только в регистр 4 вводится смещение hx , а в регистр 5-перемещение по координате У.
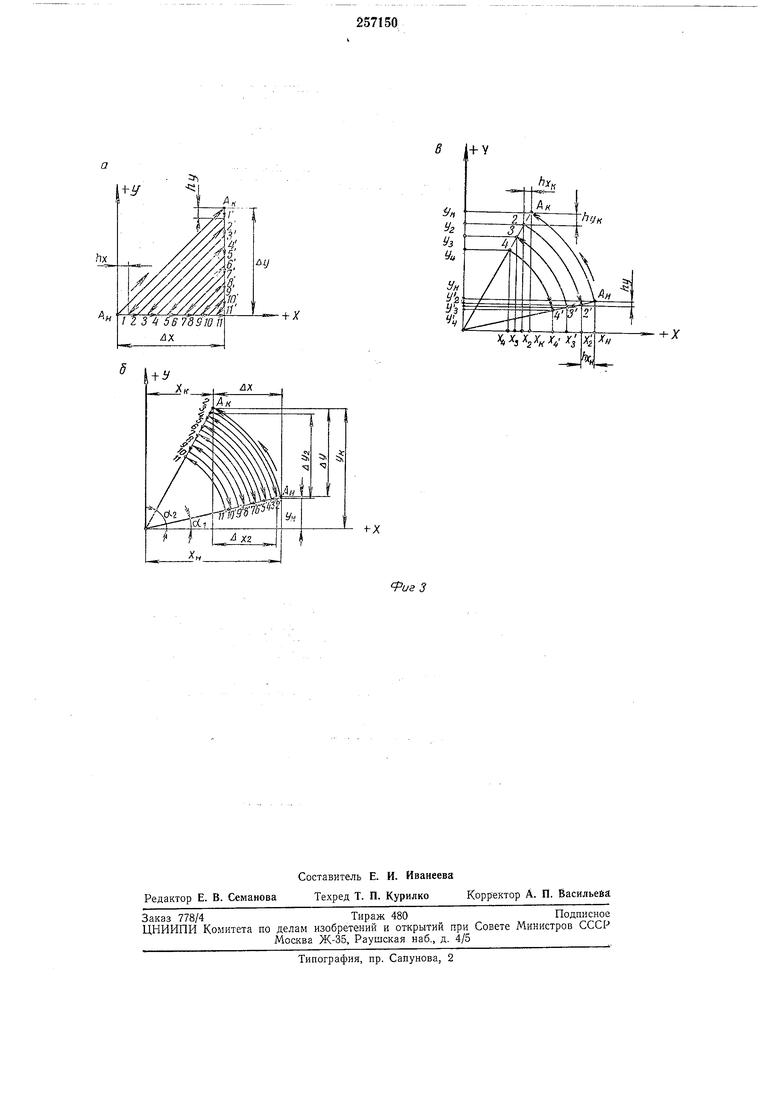
Для отработки площадей прямоугольников (четвертый режим) необходимо знать катеты прямоугольного треугольника X и У, смещения /IX и hy по соответствующим координатам,
X У ЧИСЛО однотипных перемещений Л
знаки и скорость отработки.
При этой отработке выполняется следующая последовательность действий: коммутатор 28 устанавливается на четвертый режим работы, коммутатор 6 на линейный режим интерполяции; значения катетов прямоугольного треугольника X п У, смещения по координатам, число однотипных перемещений Лх (У), знаки и скорость отработки вводятся соответственно в регистры 4, 5, 20 и 21, блоки / и 23. При вводе значения катетов треугольника X п У одновременно заводятся в .регистр 24, где происходит их суммирование.
По сигналу «Пуск с блока 26 включается блок 27, начинающий выдавать задающую частоту, включается свет и .начинается отработка гипотенузы треугольника Л«Л . По
окончании отработки гипотенузы, что фиксируется регистром 24 и схемой 7 значения катетов треугольника X i У передаются соответственно в регистры 18 и 19, а значение смещения Ну из регистра 2(7 поступает в регистры 5 и 24, оставаясь одновременно в регистре 20, меняется также направление движения в регистре 21. За период отработки смещения hy в регистры 1-8 и 19 в обратном коде поступают значения смещений hx и /Zx, которые .постоянно хранятся в регистре 20, и в регистрах J8 и 19 вычисляются значения Ах (Дх - hx) и Дг/1 (Ду - fty)3. По окончании отработки У, что фиксируется .регистром 24 и схемой 7,
значения х и Ау передаются в регистры 4, 5 и 24 Б последнем регистре .поисходит суммирование ( Дг/1) этих значений, значение смещения hy при передаче з.начений У в регистр 5 стирается; отрабатывается / - 1; по
окончании отработки / - / переключаются знаки координат, значения Дх, иДг/i передаются в регистры 18 и 19, а Б регистры 24 м 4 заносится значение /ix; отрабатывается величина смещения hx и одновремеано в регистpax 13 и 19 вычисляются значения Дv2 Дл;1 - hx и Дг/ Дг/1 - hy . Процесс отработки площади продолжается до тех пор, пока регистр 22 и схема 7 не обнаружат конец отработки площади прямоугольного треугольвика.
Для отработки площадей окруж.ностей и секторов (пятый режим) необходимо знать координаты начальной А (Xf, У и конечной АК (Х-к, УК ) точек отработки смещения начальной Л„ (hxH,, hy ) и конечной А фхк hy,. ) точек отработки
hxa cos oi hy I sin ai
XK cos a2
fty. / sin 02 число однотипных перемещений.
yv j,g ;.
размер инструмента
(щи.рина линии), скорость и направление отработки (см. фиг. 3).
При этой отработке выполняется следующая .последовательность действий: .коммутатор 28 устанавливается на режим - площадь окруж.ности; коммутатор 6 - на куговой режим интерполяции; значения координат начальной точки заносятся в регистры 18 4Х„ и регистр 5 (У«). Величины смещений начальной и конечной точек заносятся соответственно в
регистры 20 и 21, число однотипных перемещений Л - в регистр 22. В регистр 24
заносятся абсолютные перемещения по координатам X и У, где Х (), а У
( УК-УН)- В процессе ввода этих значений в регистр 24 происходит их суммирование. По сигналу «Пуск с блока 26 включаются заданная частота .и свет.
При отработке дуги Л„ А в работе принимутаторы 23 к 6 и блоки 27 и 2. По окончании отработки дуги ,, что фиксируется регистром 24 .и схемой 7, ПО сигналу с последнего интерполятор компараторами 28 и 6 переключается на линейный режим работы по линии 5 Л -2. По окончании отработки дуги в регистрах 4 и 5 устанавливаются значения координат конечной точки отработки. За время отработки отрезка Л„ - 2 необходимо вычислить абсолютные перемещения по координа-Ю там для отработки следующей дуги 2 - 2 и найти их сумму по формуле Дл: + Дг/ ,)-(X,h,,)+(y,-hy,)- (У - hy ) . Для этого в регистры 18 и 19 обратным кодом засылаются соответственно15 величины смещений Лхя и hy и вычисляются выражения ( ) и (У - /ly ), после чего эти величины последовательно пересылаются для суммирования в регистр 24. Содержимое регистра 20 записывается в регистр 2320 и одновременно остается в регистре 20. После очистки регистров 18 и 19 в них записываются значения X и У из регистров 4 и 5 (отработка отрезка Л„-2 нродолжается) и вычисляются выражения ( ) н ( -hy ), величины смещений h Хк и Ау, пересылаются в регистры 18 и 19 обратным кодом из регистра 2,1. Вычисленные выражения последовательно передаются в регистр 24 и суммируются с его содержимым. Если результат30 получается отрицательным, то берется обратный код этого числа, если же результат положительный, то прямой код. По окончании отработки линии , что обнаруживается регистром 20 и схемой 7, и вычисления35 (Ax-fAy) в регистре 24, происходит переключение интерполятора на круговой режим интерполяции, и изменяется направление вращения; отрабатывается дуга 2 - 2, только теперь начальной точкой отработки является40 точка 2, а конечной-точка 2; по окончании отработки дуги 2 - 2 происходит снова переключение на линейный режим интерполяции, меняются знаки координат; отрабатывается отрезок 2 - 3, и одновременно вычисляется45 сумма аосолютных перемещении для следующей дуги 3 - 3. Дальнейший процесс отра ботки происходит аналогично описанному до тех пор, ПОКЁ регистр 22 и схема 7 не обнаружат конец отработк и сектора. Предмет изобретения Вычислительное устройство для систем упавления точными координатными перемещениями, содержащее блок ввода информации фотосчитывающее устройство, схему обнаруженин конца кадра и линейно-круговой интерполятор, содержащий регистры, логические элементы, блок переключения знаков координат, блок задания скорости и коммутатор режима работы, отличающееся тем, что, с целью расширения функциональных возможностей, сокращения объема вводимой информации и улучшения эксплуатационных характеристик, в нем вход накопительного регистра хранения величин смещений но координатам и вход наколительного регистра хранения суммы абсолютных значений .перемещений eipea собирательные схемы подключены к выходу блока переключения знаков координат интерполятора, а их выходы подключены ко входам схемы обнаружения конца кадраИ через собирательные схемы соединены с соответствующими входами регистров хранения координат начальных точек отработки, а также присоединены через собирательные схемы ко входу буферного |регистра и ко входу регистра хранения суммы абсолютных значений перемещений но координатам, выход которого подключен к одному из входов схемы обнаружения конца кадра, .выходы регистров хранения координат .начальных точек оТ|ра1ботк1и через собирательные схемы соединены со входом регистра хранения суммы абсолютных значений перемещений, входы регистров хранения координат начальных точек отработки соединены через собирательные схемы с выходами реверсивных накопительных регистров янтерполятора, управляющие входы всех регистров и вход схемы обнаружения конца кадра присоединены к выходам коммутатора программ переключений, выход схемы обнаружения конца кадра через собирательную схему подключен ко входу накопительного регистра числа повторений однотипных перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР С ПЕРЕКЛЮЧАЕМОЙЛОГИКОЙ | 1969 |
|
SU256014A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Устройство для управления движущимся объектом | 1968 |
|
SU722503A3 |
| Интерполятор для систем программного управления | 1977 |
|
SU658528A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1977 |
|
SU732934A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
в
ЛХ
uy
-fX
uy
л 2
