Изобретение относится к техническим средствам автоматизации и может быть использовано в автоматизированных системах управления технолотическими процессами.
Известны регуляторы,содержащие блок фор-мяроьйушя закона регулирования, блок ручного управления положением исполнительного механизма (задатчик управляющего воздействия), блок ручного управления заданием (задатчик регулируемого параметра) и имеющий ручной и автоматический режимы управления исполнительным механизмом, при этом переключение с одного режима работы на другой осуществляется безударно (плавно) т.е. без скачков выходного сигнала регулирующего устройства 1.
Однако безударность переключения в этих регуляторах достигается либо включением интегратора в качестве выходного звена, либо такой (Организацией связей между блоками, которая обеспечивает равенство выходных сигналов блока ручного управления и блока формирования закона регулирования в момент переключения режимов работы либо комбинацией их способов.
Наиболее близким техническим рещенлем является регулятор, содержащий блок ручного управления, первый ключ, выход которого соединен с выходом второго ключа, а вход - с бдш{м выходом блока памяти и первым входом блока формирова1шя закона регулирования; выход которого подключен к входу второго ключа 2.
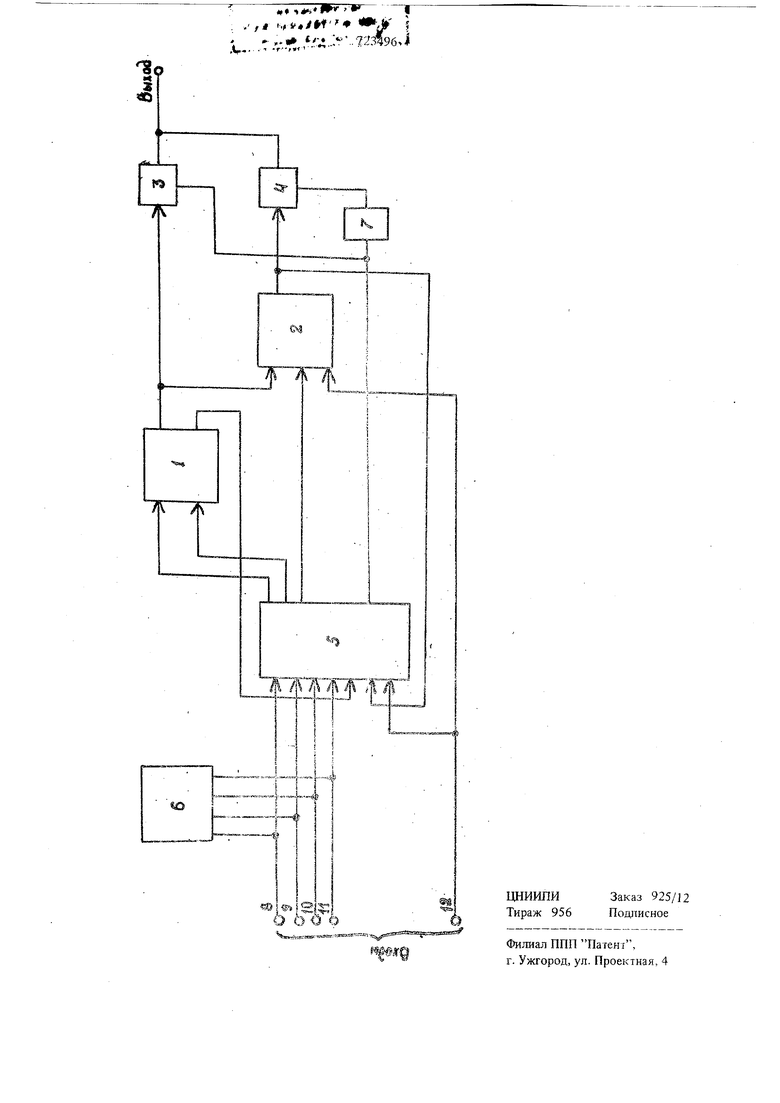
Недостатками устройства является его сложность, вследствие наличия двух блоков аналоговой памяти - для регулируемого параметра и для управляющего воздействия, что при дистанционном управлении требует соответственно двух однотипных каналов утгравления, а при. местном управлении - двух одинаковых блоков ручного управления; недостаточная точность и сложность, так как переключение с режима непосредственно цифрювого или ручного управления на режим автоматического управления сопровождается хоть и плавным, но все-таки изменением выходного сигнала, т.е. воздействием на объект, которое во всех случаях, кроме случая отступления регулируемого .параметра к заданному безопасному значению, является нежелательным, так как снижает производительность технического оборудования. Цель - упрощение и повышение точности регулятора. Цель достигается тем, что регулятор содержит инвертор и блок переключения режимов, первый вход которого соединен со вторым входом блока формирования закона регулирования, второй вход - с выходом блока фор(мирования закона регулирования, третий входс другим выходом блока памяти, соответствующие входы которого связаны с первым и вто рым выходами блока переключения 1 режимов, .третий выход которого соединен с третьим входом блока формирования закона регулирювания четвертый выход -- с управляющим входом пер вого ключа и через инвертор - с управляющим входом второго ключа, четвертый, пятый, шеетой и седьмой входы блока переключения режимов соединены с соответствующими выходалш блока ручного управления и входами регулятор На чертеже представлена блок-схема регулятора. Схема содержит блок 1 памяти, блок 2 формирования закона регулирования, ключи 3 и 4, блок 5 переключения режимов блок 6 рунного управления, инвертор 7. Регулятор содержит: вход 8 значения задания, вход 9 управления вводом задания, вход 10 включения режима непосредственного цифрового и ручного управления вход 11 вклкяения режима автоматического управления, вход 12 регулируемого параметра.. , Регулятор работает следующим образом. В, режиме непосредственного цифрового (OTJ УВМ) или ручного управления, блок 1 памяти используется как задатчик управляющего воздействия. В режиме автоматического управления управляющее воздействие формирует блок формирования закона регулирования, а блок 1 памяти используется как задатчик регулируемого параметра. Выходы блоков 1 и 2 памяти и формирования закона регулировани подключаются к вь1ходу устройства через ключи 3 и 4, состояние которых определяется выходным сиг налом блока 5 переключения режимов. Блок 6 ручного управления предназначен для ввода задания и переключения режимов работы при мест
ном управлении.
В режиме автоматического управления сигнал блока 5 переключ-„ния режимов держит ключ 4 в открытом состоянии, а кЛюч 3 - в закрытом состоянии.55
Блок 2 формирования закона регулирования формирует управляющее воздействие в соответствии со значением регулируемого параметра и значением задания, хранимого в блоке 1 памя7
регулирования в режим формирования закона регулирования.
Таким образом, переключение в режим автоматического управления также происходит без изменения выходного сигнала регулятора.
Переключение режимов работы при местном управлении производится подачей команд от блока 6 ручного управления путем нажатия соответствующих кнопок. 4 ти. Изменение задания осуществляется дистанционно подачей на входы 8 и 9 нового значе1ШЯ задания и команды управления вводом задания, при этом блок 5 переключения режимов подключает новое значение задания к аналоговому входу блока 1 памяти и сопровождает его командой запоминания, в результате чего старое значение задания заменяется новым значением. Аналогично происходит изменение задания при местном управлении от блока 6 ручного управления. Для дистанционного переключения регулятора в режим ручного и непосредственного цифровою управления на вход 10 подают команду включения режима непосредственного цифрового и ручного управления, и по этой команде блок 5 переключения режимов выдает сигнал на управляющий вход блока 2 формирования закона регулирования, включая блок в режим запоминания выходного сигнала; подключает к аналоговому входу блока 1 памяти выходной сигнал блока 2 формирования закона регулирования и подает команду запомина1{ия; после получения от блока 1 памяти известительного сигнала окончания запо минания одновременно переводит ключ 4 в закрытое состояние, ключ 3 - в открытое состояние, блок 3 формирования закона регулирования в режим повторителя сигнала задания. Таким образом, переключение в режим непосредствешюго цифрового и ручного управления происходит без изменений выходного сигнала регулятора и объект регулирования не чувствует того переключения. Для переключения в режим автоматического yпpaвлe шя на вход 11 подают команду включения режима автоматического управления, и блок 5 переключения режимов переводит блок формирования закона регулирования 2 в режим запоминания ( выходного сигнала, ключ 3 - в закрытое состояние, ключ 4 - в открытое состояние; подключает на аналоговый вход блока 1 памяти текущее значение регулируемого параметра и подает команду запоминания; после получения от блока 1 памяти известите льного сигнала окончания запоминания переводит блок 2 формирования закона 5 Использование одного задатчика блока 1 памяти для всех режимов работы позволяет уменьшить число линий связи при дистанционном управлении и унифицировать обращение к регулятору от управляющей вычислительной машины. Введение блока управления переключением режима работы позволяет избелсать нежелательного воздействия на объект регулирования в момент переключения режимов работы и тем самым исключить переходный процесс, который приводит к снижению производительности оборудования в этот момент. Введение режима работы в блоке переключения режимов позволяет производить переклн}чение по одной команде, в том числе при мест ном и дистанционном управлении, что повышает гибкость управления и удобство работы опе ратора. Формула изобретения Регулятор, содержащий блок ручного управления, первый ключ, выход которого соединен с выходом второго ключа, а вход - с одним выходом блока памяти и первым входом блока формирования закона регулирования, выход 6 которого подключен ко входу второго ключа, отличающийся тем, что, с целью упрощения и повышения точности регулятора, он содержит инвертор и блок переключения режимов, первый вход которого соединен со вторым входом блока формирования закона регулирования, второй вход - с выходом блока формирования закона регулирования, третий вход - с другим выходом блока памяти, соответствующие входы которого связаны с первым и вторым выходами блока переключения режимов, третий выход которого соединен с третьим входом блока формирования закона регулирования, четвертьш выход - с управляющим входом первого ключа и через инвертор - с управляющим входом второго ключа, четвертый, пятый, шестой и седьмой входы блока переключе1шя режимов соединены в соответствуюшигуш выходалш блока ручного управления и входами регулятора. Источники информации, принятые во внимание при экспертизе 1.Патент Франции N° 2161835, кл. G 05 В 7/00, опублик. 1973. 2.Управляющие вычислительные машины в АСУ технологическими процессами. Под ред Т. Харрисона, М., Мир, 1975, фиг. 5; 65, с. 490.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1981 |
|
SU966663A2 |
| Устройство для регулирования | 1985 |
|
SU1325408A1 |
| Устройство сопряжения функциональных блоков систем управления | 1986 |
|
SU1441347A1 |
| УСТРОЙСТВО БЕЗУДАРНОГО ПЕРЕХОДА С ОДНОГО ПАРАМЕТРА УПРАВЛЕНИЯ НА ДРУГОЙ | 2007 |
|
RU2372637C2 |
| Устройство для регулирования скорости двигателя | 1978 |
|
SU877482A1 |
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| Устройство для задания внеплановой нагрузки электростанции | 1980 |
|
SU1065955A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU962848A1 |
| ТРЕНАЖЕР ОПЕРАТОРА СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1991 |
|
RU2012065C1 |