1
Устройство относится к области автоматизации управления скоростью двигателя, в частном случае устройства, выполненного на схеме управляемый преобразователь напряжения двигатель, включающей последовательно соеданенные задатчик управляющего- сигнала, автономный канал регулирования, управляемый преобразователь и двигатель с датчиком скорости.
Известно устройство, выполняющее аналогичные функции 1.
Указанное устройство содержит задатчик скорости, обеспечивающий выдачу управляющего сигнала, автономный канал управления скорЬсти, включающий множительный блок, принимающий зтот сигнал, регулятор скорости и управляемый ключ, осуществляющий подключение выхода задатчика на вход множительного блока.
К недостаткам этого устройства относятся низкое быстродействие и малая надежность в связи с невозможностью выполнения обусловленных функций устройством при отказе за-. датчика скорости.
Наиболее близким по технической сущности к заявляемому, его прототипом, является устройство 2J.
Оно содержит последовательно соединенные орган управления, обеспечивающий задание режима работы устройства, блок задания, осуществляющий выдачу управляющего сигнала, систему автоматизированного управления приводом, принимающую этот сигнал, силовую часть с двигателем.
10
Существенный недостаток рассматриваемого устройства заключается в малой надежности в связи с невозможностью осуществления функiWH управления при отказе блока задания или органа управления.
15
Цель изобретения - повыщение надежности устройства.
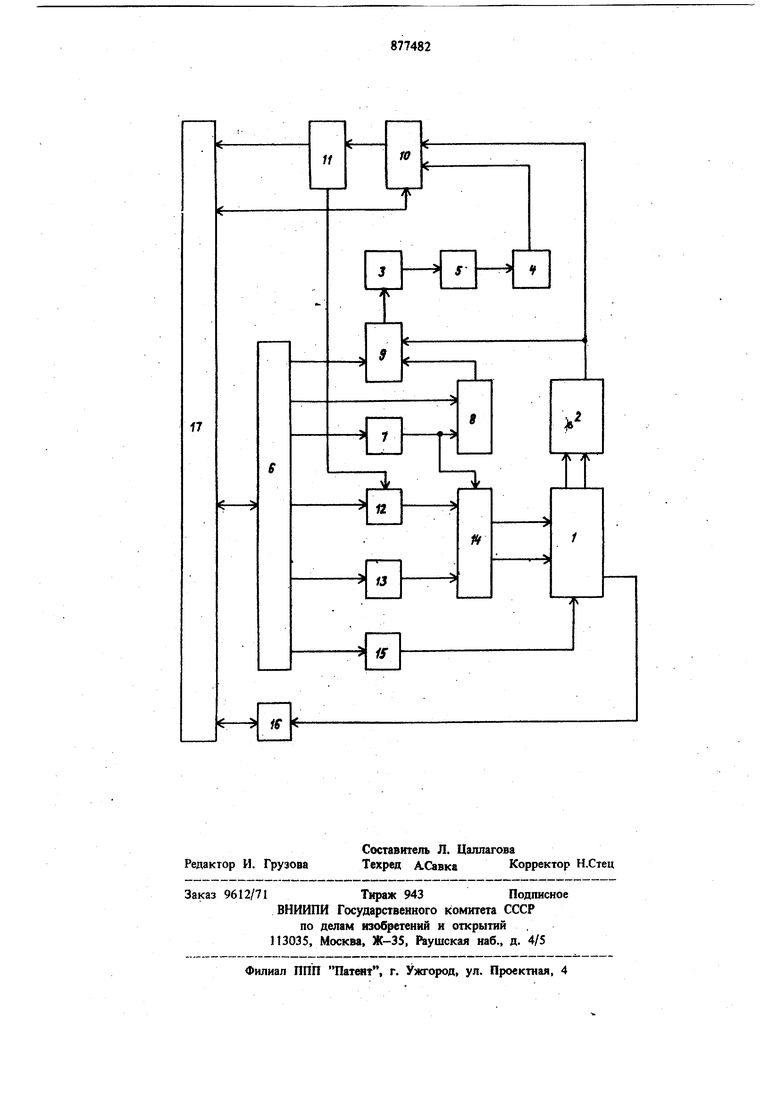
Поставленная цель достигается тем, что устройство, содержащее последовательно соединенные орган управления (первый блок управле20ния) и блок задания (первый блок задания), а также систему автоматизированного управления приводом (второй блок управления) и сияовую часть с двигателем, кроме того содержит управляемые от одного логического устройства (в частном случае, управляюшая вычислительная машина) последовательно соединенные блок ввода данных, второй блок задания, преобразователь код-аналог и переключатель калалов, выход которого подсоединен к входу второго блока управления, а вход блока ввода данных связан с выходом логического блока, в совокупности обраэзтощих канал передачи управляющего сигнала в режиме прямого процессорного управления;- последовательно соединенные первый коммз атор и преобразователь аналог-код, образующих канал сбора, обработки и передачи информации о текущем значении регулируемого параметра скорости двигателя и управляющего сигнала на выходе первого блока задания, и одновременно выполняющие функции цепей обратных связей по указанным параметрам, при этом входы коммутатора соединены с выходами первого блока задания и датчика скорости, а выходы преобразователя - с логическим блоком и первым блоком памяти; второй комму татор, вход которого соединен с выходом пер вого блока управления, а выход - с логическим блоком, образующий информационный ка нал о соответствии состояния первого блока задания обусловленному режиму регулирования первый и второй блоки памяти и блок сравнения, а также переключатель режима образуют схему автоматизации управления первым блоком задания, для чего входы блоков памя ти и переключатели соединены с выходом бло ка ввода данных, входы блока сравнения - с выходами блоков памяти и второго блока задания, а выходы блока сравнения и переключателя режимов подключены к входам пер вого блрка управления, чем обеспечивается ввод на блок управления сигналов - команд на включение в режим автоматического управ ления и на отработку блоком задания заданно го выходного сигнала. Такое устройство позволяет существенно уменьшить число остановок двигателя вследствие отказов в каналах управления за счет использования в режиме управления одного из двух источников управляющего сигнала, один из, которых осуществляет управление, а другой в то же время - непрерывное отслежива ние и отработку заданного управляющего сигнала на выходе своего задатчика, обеспечивая тем самым реализацию структуры управления с горячим резервированием, с подключением резервногр источника (задатчика) в момен отказа (отключения) другого, повышая тем самым живучесть и работоспособность, а в целом - надежность устройства. На чертеже дана блок-схема устройства. 4 Устройство включает последовательно соединенные первый блок 1 управления и первый блок 2 задания, на выходные контакты которого дается управляющий сигнал, второй блок 3 управления и датчик 4 скорости, соединенные соответственно с входом и выходом двигателя 5, последовательно соединенные блок 6 ввода данных, осуществляющий передачу и распределение управляющих и .информационных слов-кодов на сопряженные с ним функциональные блоки, второй блок 7 задания, осуществляющий прием, запоминание и выдачу на свои выходные щипы кода управляющего сигнала-задания, преобразователь 8 код-аналог, принимающий код-задание и преобразующий его в зквивалентный ему аналоговый сигналзадание, переключатель 9 каналов управления, обеспечивающий подключение ко входу блока 3 одного из источников управляющего сигнала-задания: первого блока 2 задания или второго блока 7 задания, последовательно соединенные первый коммутатор JO, обеспечивающий выбор одного из источников информационного сигнала: блока 1 или датчика 4 скорости, и преобразователь 11 аналог-код, осуществляющий преобразование принятого аналогового сигнала в эквивалентный ему код, первый 12 и второй 13 блоки памяти и блок 14 сравнения, обеспечивающие прием, запоминание и передачу на блок 14 сравнения кодов текущег о значения управляющего сигнала с выхода первого блока 2 задания - через блок 12, или текущего значения регулируемого параметра с выхода датчика 4 скорости- - через блок 13, а затем сравнения одного из этих кодов с кодом-заданием - с выхода блока 7. Переключатель 15 режимов обеспечивает прием от блока 6 команды,запоминание заданного состояния до поступления следующей команды и включение цепи питания первого блока 1 управления и первого блока 2 задания, включая тем самым их в режим автоматического управления. Второй коммутатор 16 осуществляет прием, запоминание и передачу сигнала о состоянии готовности блока 2, логический блок. 17 (в частном случае представляющий собой управляющую вычислительную машину или процессор) - общее управление устройством путем выдачи, приема и обработки информационных слов, содержащих коды команд и управляющих сигналов, а также коды адреса функционального блока. Для этого вторые выходы блока 6 соединены со входами соответственно блоки 13, переключателя 15, со вторым входом переключателя 9, со вторым входом преобразователя .8 и с первым входом блока 12, второй вход которого подключен к первому выходу преобразователя 11, а выход - к первому входу блока 14, второй вход которого соединен с выходом блока 13, третий вход - с выходом блока 7, а выход соединен с первым входом блока 1. Третий вход переключателя 9 подключен к выходу блока 2, а выход к входу блока 3. Второй вход блока 1 соед нен с выходом переключателя 15, а выход - с входом коммутатора 16. Первый вход ком мутатора 10 соединен с выходом блока 2, а второй вход - с выходом датчика 4. Второй выход преобразователя 11 подключен к входу логического блока 17, соединенного други ми входами соответственно с коммутатором 10, блоком 6 и коммутатором 16. В устройстве возможна работа как в режи ме ручного, так и в режиме прямого процессорного управления (автоматического упра ления) . Работа в режиме ручного управления испол зуется при настройке, откладке или при отка зе элементов в каналах автоматического управления. В ручном режиме управление обеспечивается обычным путем с помощью первого блока 1 управления, в частном случае включающем злемент регулирования, при этом осуществляется отработка положения первого блока 2 задания, который, в частном случае, включает сельсин-задатчик с приводом, управлением направления вращения которого осу.ществляется установка ротора сельсина в положении, при котором на выходных контактах сигнальной обмотки сельсина будет получено требуемое значение управляющего сигнала. При этом на входах логического блока 17 сигналы отсутствуют, а в переключателе 9 замкнутая цепь, соединяющая вход блока 3 с выходом блока 2. В режиме прямого процессорного управления логический блок 17 вырабатывает заранее обусловленную последовательность, в соответствии с математической моделью заданного технологического режима, управляющих кодовых слов, содержащих код-логический адрес включаемого устройства, код команды, выполняемой устройством, или код-задание управляющего сигнала. При этом кодовые слова (посылки), поступающие от блока 17 непосредственно на блоки 6, 10, И, 16 и через блок 6 ввода данных на блоки 8, 9, 12, 13,, 15, осуществляют включение каждого из блоков и подготовку их к работе в соответствии с функциональным назначением. Командой на переключатель 15 включаются в автоматический режим работы блоки 1 и 2. Командой на коммутатор 10 подключается к преобразователю 11 выход блока 2. Полученный на выходах блока 11 код поступает чё6рез блок 12 на блок 14 сравнения и на логический блок 17. Командой на переключатель 9 осуществляется подключение входа блока 3 к выходу преобразователя 8. Код-задание через блок 6 поступает на блок 7, где запоминается и хранится до поступления нового задания, а с выхода блока поступает в преобразователь 8 и одновременно в блок 14 сравнения. Преобразованный в аналог управляющий сигнал с выхода преобразователя 8 через замкнутую цепь переключателя 9 подается на вход блока 3, обеспечивая вьщачу последним соответствующего воздействия на двигатель 5. В блоке 14 сравнения, принятые коды задания и текущего значения сигнала на выходе блока 2 сравниваются, при этом в блоке 14 вырабатывается сигнал управления, соответствующий знаку рассогласования сравниваемых кодов, который по одному из каналов поступает на блок 1. В случае равенства кодов, сигналов на обоих каналах не будет, а с выхода блока 1 на вход коммутатора 16 поступает сигнал Готово, поступающий затем в блок 17. Этим сигцалом оператор и логический блок 17 информируется о равенстве сигнала на выходе блока 2 величине заданного управляющего воздействия и готовности блока 2 к приему управления на себя. Для контроля текущего значения регулируемого параметра - скорости двигателя на коммутатор 10 выдается команда, подключающая к преобразователю И выход датчика 4 скорости. Полученный при этом код поступает в блок 17, где анализируется, а по результатам анализа выдается корректирующее задание на вход блока 7 или блока 13. При этом на блок 13 сравнения поступают Ьовьге значения сравниваемых кодов и будет выработан новый корректирующий сигнал управления для блока 2. Этим же путем задаются и упреждающие. корректировки-задания на положение блока 2. Таким образом в устройстве осуществляется резервирование источника управляющего воздействия в каждый текущий момент работы, чем существенно повыщается его надежность, так как в случае отказа в канале прямого процессорного управления в переключателе 9 роисходит переключение входа блока 3 с выхода блока 8 на выход блока 2. Состояние блока адания сохраняется до поступления новых оманд или вмешательства оператора. Сравнительная оценка данного устройства известным показала, что с повышением его адежности, а в связи с этим с увеличением ремени наработки на отказ и сокращения времени, затрачиваемого на перестройку режима, в частном случае, при исполь: овании устойства в приподах клетей прокатных станов. обеспечивает прирост производительности каждой отдельиой клети как минимум на 0,4%. Кроме того, за счет использования высокоточного первичного источника управляющего воздействия логического блока (УВМ) и повышения точности оценки качества регулирования повышается качество реализации заданного технологического режима, что в конеч ном итоге одновременно приводит к улучшению качества полученной продукции. Формула изобретения Устройство для регулирования скорости двигателя, содержащее последовательно соединенные первый блок управления, первый блок за дания, а также второй блок управления и дат чик скорости, соедииенные соответственно со входом и выходом двигателя, отличаю щееся тем, что, с целью повышения надежности устройства, оно содержиг последовательно соединенные- блок ввода данных, второй блок задания, преобразователь код-аналог и пе реключатель каналов управления, последователь но соединенные первый коммутатор и преобразователь аналог-код, а также первый и второйблоки памяти, блок сравнения, переклю-, чатель режимов, второй коммутатор и логический блок, причем вторые выходы блока ввода данных соединены со входами соответственно второго блока памяти, переключателя режимов, со вторым входом переключателя каналов управлення, со вторым входом преобразователя код-аналог и с первым входом первого блока памяти, второй вход которого подключен к первому выходу преобразователя аналог-код, а выход - первому входу блока сравнения, второй вход которого соединен ,с выходом второго блока памяти, тре1ий вход - с выходом второго блока задания, а выход - с первым входом первого блока управления, третий вход переключателя каналов управления подключен к выходу первого блока задания, а выход - ко входу второго блока управления, второй вход первого блока управления соединен с выходом переключателя режимов, а выход - со входом второго коммутатора, первый вход первого коммута ра соединен с выходом первого блока задания, а второй вход с выходом датчика скорости, второй выход преобразователя аналог-код подключен ко входу логического блока, связанного с первым коммутатором, блоком ввода данных и вторым коммутатором. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 537723, кл. G 05 В 19/00, 1977. 2.Авторское свидетельство СССР N 588030, кл. В 21 В 37/00, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для управления переналадкой листорезальной машины | 1990 |
|
SU1775198A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Устройство для регулирования расхода жидкости | 1984 |
|
SU1236434A2 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
| Бесконтактный двигатель постоянного тока | 1987 |
|
SU1582323A1 |
| Устройство для управления вентильным двигателем циклоконверторного типа (его варианты) | 1983 |
|
SU1137562A1 |
| Система автоматического управления процессом крашения | 1987 |
|
SU1527344A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1135002A1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |