(54) СБРАСЫВАТЕЛЬ ДЛИННОМЕРНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбрасыватель длинномерных грузов | 1980 |
|
SU939367A2 |
| Устройство для перегрузки цилиндрических грузов | 1984 |
|
SU1175821A1 |
| Автомат для передачи кирпича-сырца с выдающего кирпич транспортера резательного станка на полки люлечного конвейера | 1960 |
|
SU139960A1 |
| Устройство для химообработки | 1975 |
|
SU606788A1 |
| Устройство для сортировки и укладки заготовок | 1981 |
|
SU977340A1 |
| Устройство для загрузки люлек подвесного конвейера | 1986 |
|
SU1426899A1 |
| ДЕЛИТЕЛЬНО-ЗАКАТОЧНАЯ МАШИНА ДЛЯ ПРОИЗВОДСТВА ТЕСТОВЫХ ЗАГОТОВОК БАРАНОЧНЫХ ИЗДЕЛИЙ | 2006 |
|
RU2325055C1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| КОНВЕЙЕР ДЛЯ СОРТИРОВКИ ДЛИННОМЕРНЫХ ГРУЗОВ | 1971 |
|
SU313760A1 |
| Устройство для стопирования полых конусных изделий | 1978 |
|
SU776948A1 |
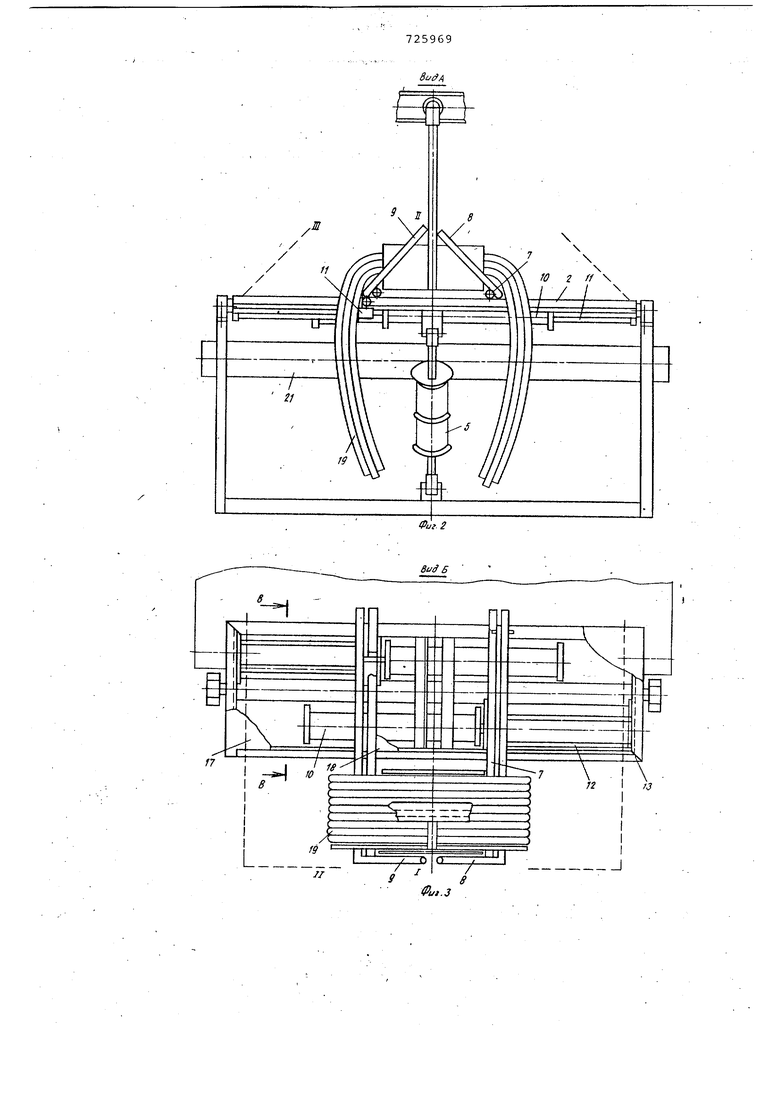
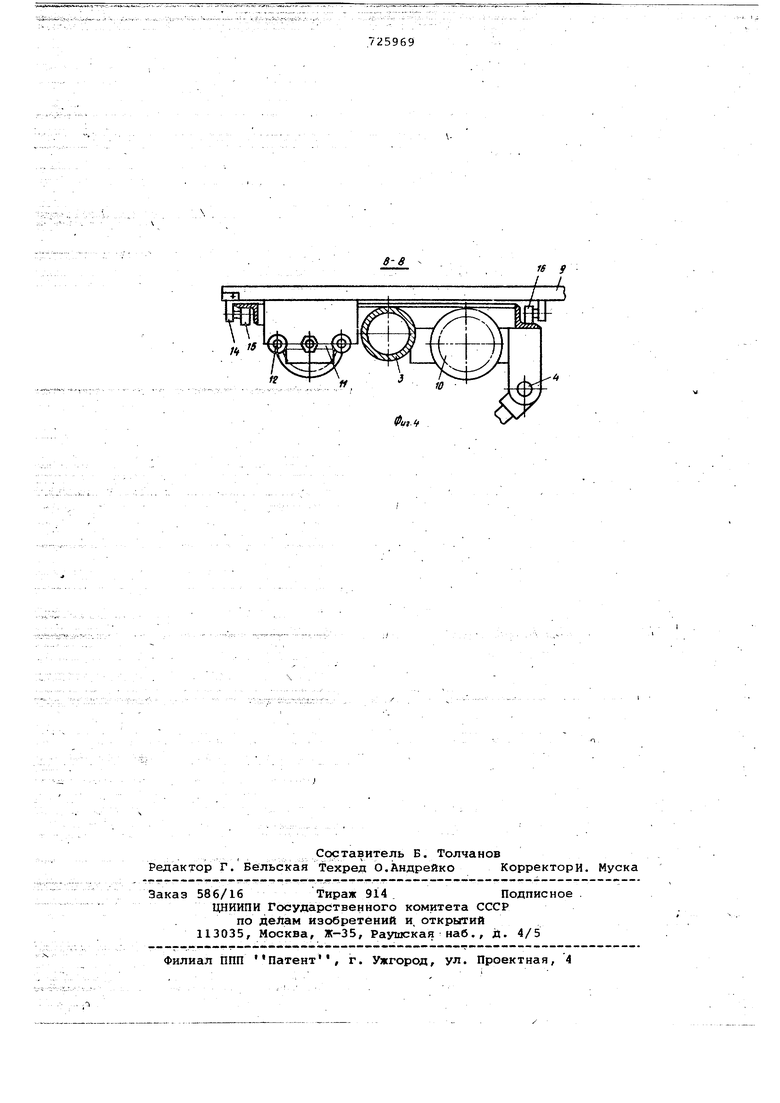
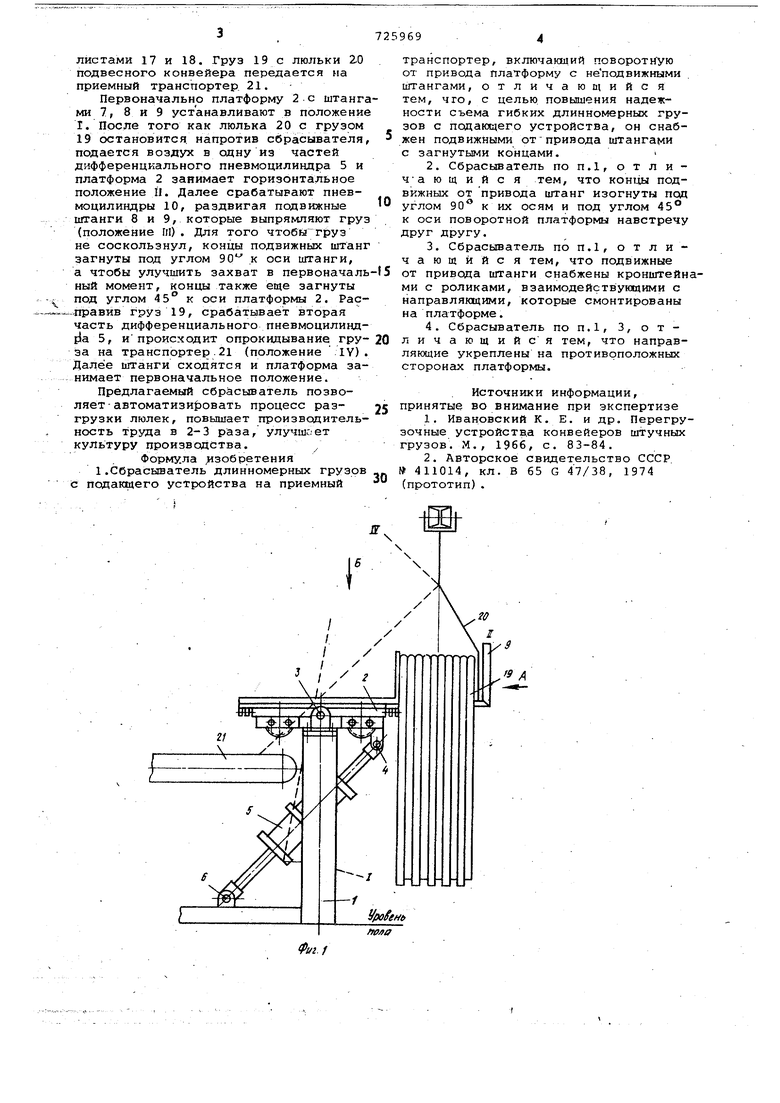
Изобретение относится к псдаъемнотранспортным средствам, в частности к устройствам для съема рукавов с люлек конвейера. . . Известно устройство для сбрасывания грузов, включающее дневмоцилиндр к штоку которого жестко прикрепленаплатформа, гребенки, соединенные с платформой с помощью шарнира, и консоль, на конце которой прикреплена Г-образная шина 1. Однако это устройство не позволяет снимать с люльки свисающие длинно мерные грузы. Известен также сбрасыватель длинномерных грузов с подающего устройст ва на приемный транспортер, включающий поворотную от привода платформу с неподвижными штангами 2. Однако известный сбрасыватель не обеспечивает надежного съема длинномерных гибких грузов круглого сече ния, так как возможно их скатывание. Целью изобретения является повыше ние надежности съема гибких длинномерных грузов с подающего устройства Цель достигается тем, что сбрасыватель снабжен подвижными от привода штангами с загнутыми концами под углом 90 к их осям и под УГЛОМ 45° к оси поворотной платформы навстречу друг другу. Кроме того,подвижные от привода, штанри снабжены кроЬштейками с роликами, взйимодействукщими с направляющими, которые смонтированы на противоположных -сторонах платформы. На фиг. 1 изображен предлагаемый сбрасыватель, общий вид; на фиг. 2 - вид А фиг. 1; на фиг. 3 - вид Б фиг.1; на фиг. 4 - разрез В-В фиг. 3. Сбрасыватель содержит раму 1, на которой шарнирно укреплена поворотная платформа 2, Пла.тформа поворачивается в подшипниках на оси 3 с помсщью шарнира 4 дифференциальным , пневмоцнлиндром 5, укрепленным посредством шарнира 6 на раме 1. На платформе 2 установлены неподвижные 7 и подвижные 8 и 9 штанги, передвигающиеся с помощью пневмоцилиндров 10 через планки 11. направляющие 12 укреплены на пластинах 13. Для того чтобы избежать перекоса подвижных штанг, на них имеются упоры: на штанге 9 укреплен кронштейн 14 с роликом 15, а на штанге 8 - кронштейн с роликом 16. Платформа 2 сверху закрыта листами 17 и 18. Груз 19 с люльки 2-0 подвесного конвейера передается на приемный транспортер 21. Первоначально платформу 2 с штанга ми 7, 8 и 9 устанавливают в положение I. После того как люлька 20 с грузом 19 остановится напротив сбрасывателя, подается воздух в одну из частей дифференциального пневмоцилиндра 5 и платформа 2 занимает горизонтальное положение И. Далее срабатывают пневмоцилиндры 10, раздвигая подвижные игтанги 8 и 9, которые выпрямляют груз (положение Ш). Для того чтобыгруз не соскользнул, концы подвижных штанг загнуты под углом 90 к оси штанги, а чтобы улучшить захват в первоначаль ный момент, концы также еще загнуты под углом 45° к оси платформы 2. Рас-правив груз 19, срабатывает вторая часть дифференциального пневмоцилиндfla 5, ипроисходит опрокидывание груза на транспортер.21 (положение IV). Далее штанги сходятся и платформа занимает первоначальное положение. Предлагаемый сбрасыватель позволяет- автоматизи|5овать процесс разгрузки люлек, повышает производительность труда в 2-3 раза, улучшает культуру производства. Формула зoбpeтeния 1.Сбрасыватель длинномерных грузов с псдагацего устройства на приемный транспортер, включающий поворотную от привода платформу с неподвижными штангами, отличающийся тем, чго, с целью повышения надежности съема гибких длинномерных грузов с поцающего устройства, он снабжен подвижными ОТпривода штангами с загнутыми концами. 2.Сбрасыватель по п.1, от л ичающийся тем, что концы подвижных от привода штанг изогнуты псд углом 90 к их осям и под углом 45 к оси поворотной платформы навстречу друг другу. 3.Сбрасыватель по п.1, о т л и чающийся тем, что подвижные от привода штанги снабжены кронштейнами с роликами, взаимодействующими с направляющими, которые смонтированы на платформе. 4.Сбрасыватель по п.1, 3, о т личающийся тем, что направляющие укреплены на противоположных CTOpoHcix платформы. Источники информации, принятые во внимание при экспертизе 1.Ивановский К. Е. и др. Перегрузочные устройств а конвейеров штучных грузов. М., 1966, с. 83-84. 2.Авторское свидетельство СССР. 411014, кл. В 65 G 47/38, 1974 (прототип).
fit
К
IS 9 IL
LJ
