Фи1.1
Zli 25
и1ий от механизма пол ьема стол, на приемной и. ющадк з 16 которого установлен ограничительный упор в виде Р 17. На пло- иадке 16 размещеп фиксатор Г в виде шар- Нирио установленного неравноплсчего рыча- ф 18 с отогнутыми вверх концами и рас- йоложеннымн на пих нажимным Р 9 и при- ))кимиым Р 20. Меньшее плечо рычага 18 с Р 19 расположено со стороны Р 17. Постунающий на рольганг 2 Г удерживается Р 14 питателя. При подходе пустой люл оки конвейера в зону перегрузки шток силового цилиндра 13 поворачивает рычаг 12 питателя. При этом Р 14 опускается, а Р 5 поднимается, задерживая продвижение следующего Г. После опускания Р 15 вниз Г перемещается по рольгангу 2 до Р 17 площадки 16. При подъеме последней Р 19 опускается и поворачивает рычаг 18, при этом Р 20 поднимается и Г прижимается к Р 17 площадки 16. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки и укладки заготовок | 1981 |
|
SU977340A1 |
| Устройство для погрузки штучных грузов на подвесной конвейер | 1990 |
|
SU1751114A1 |
| Поточная линия для конечной отделки текстильных полотен | 1985 |
|
SU1326687A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Устройство для перегрузки изделий с рольганга на подвесной конвейер | 1982 |
|
SU1046180A1 |
| Устройство для перемещения и автоматической перегрузки штучных грузов | 1987 |
|
SU1481154A1 |
| Сбрасыватель длинномерных грузов | 1978 |
|
SU725969A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ ПОДАЧИ ЛИСТОВОЙ ЦЕЛЛЮЛОЗЫ В РАЗРЫХЛИТЕЛЬНЫЕ Л^АШИНЫ | 1972 |
|
SU419589A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Устройство для загрузки и разгрузки люлечного элеватора штучными грузами | 1980 |
|
SU929515A1 |
Изобретение относится к подъемно-, транспортному машиностроению и м. 6. использовано для передачи штучных грузов (Г) с одного конвейера на другой, ilc.ib изоб- ретения - гговьгшение надежности работы устр-ва за счет исключения сползания Г с приемной плошадки при выполнении ее поворотной. Йа каркасе I установлен наклонный рольганг 2, на котором шарнирно закреплен питатель. Последний содержит двуплечий рычаг 12 с приводом в виде силового цилиндра 3, на разновысоких концах которого установлены свободно вра- шаюшиеся ролики (Р) 14, 15. На каркасе Г в зоне перегрузки Г установлен подвижс Ф 13 п Ю О5 00 со со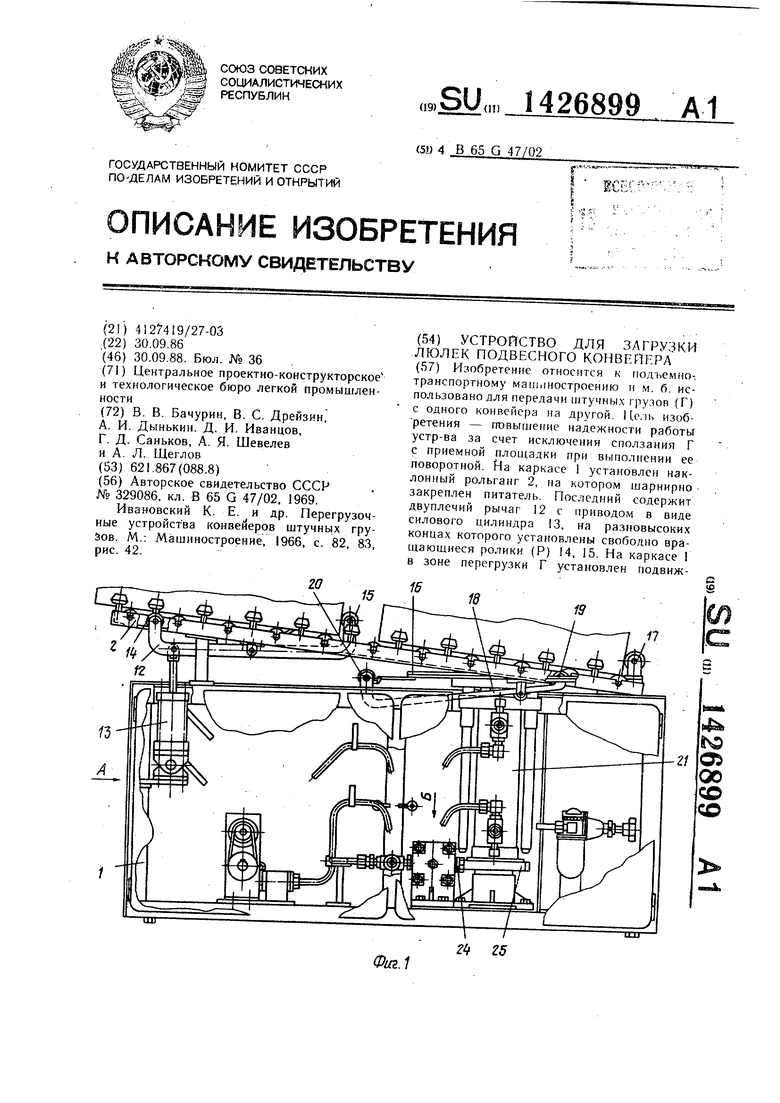
1
. Изобретение относится к подъемно- ранспортному ман1иностроению, а именно к ерегрузочным устройствам, и может быть спользовано для передачи щтучных грузов с дного конвейера па другой.
Целью изобретения является повышение адежности работы устройства за счет сключения сползания груза с приемной площадки при выполнении ее поворотной,
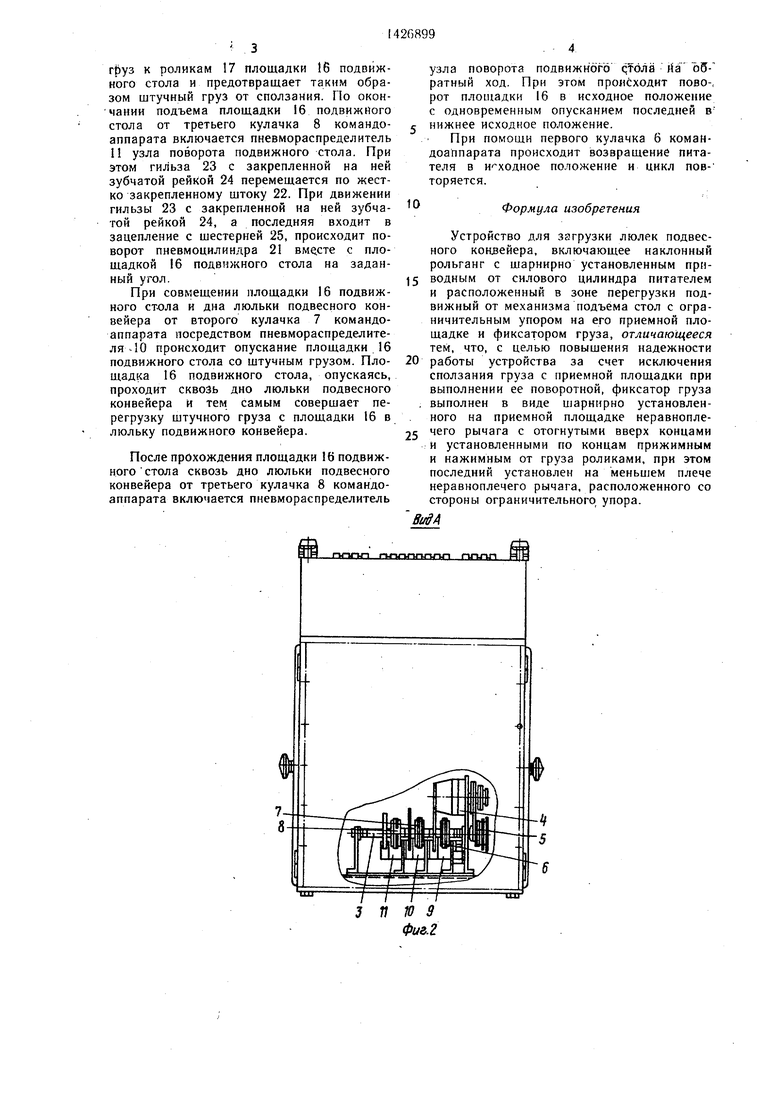
На фиг. 1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Устройство для загрузки люлек подвесного конвейера сп,ери-(ит каркас 1, на верху которого установлен наклонный рольганг 2 с роликами, расположенными на вертикальных и горизонтальных осях.
Внутри каркаса размеп1.ен командоаппа- рат, содержащий распределительный вал 3, электродвигатель 4, клиноременную передачу 5, кулачки 6-8, нневмораспределите- ли 9-- 11.
На рольганге 2 щарнирно закреплен питатель, содержащий двуплечий рычаг 12 с приводом, выполненным в виде силового цилиндра (пневмоцилиндра) 13, на разновысоких коццах которого установлены свободно вращающиеся ролики 14 и 15.
На каркасе в зоне перегрузки щтучных грузов расположен подвижный стол с грузоподъемным . механизмом. Подвижный стол состоит из установленной на грузоподъемном механизме приемной площадки 16 к закрепленным на ней ограничительным упором в виде роликов 17. С целью предотвращения сползания щтучных грузов с плоп1адки 16 последующая сообщена фиксатором груза, выцол пенным в виде не- равионлечего рычага 18 с отогнутыми вверх концами с расположенными на них шарнирами нажимным и прижимным роликами 19 и 20. Меньпше плечо с нажимным роликом 19 расположено со стороны ограничительного упора 17.
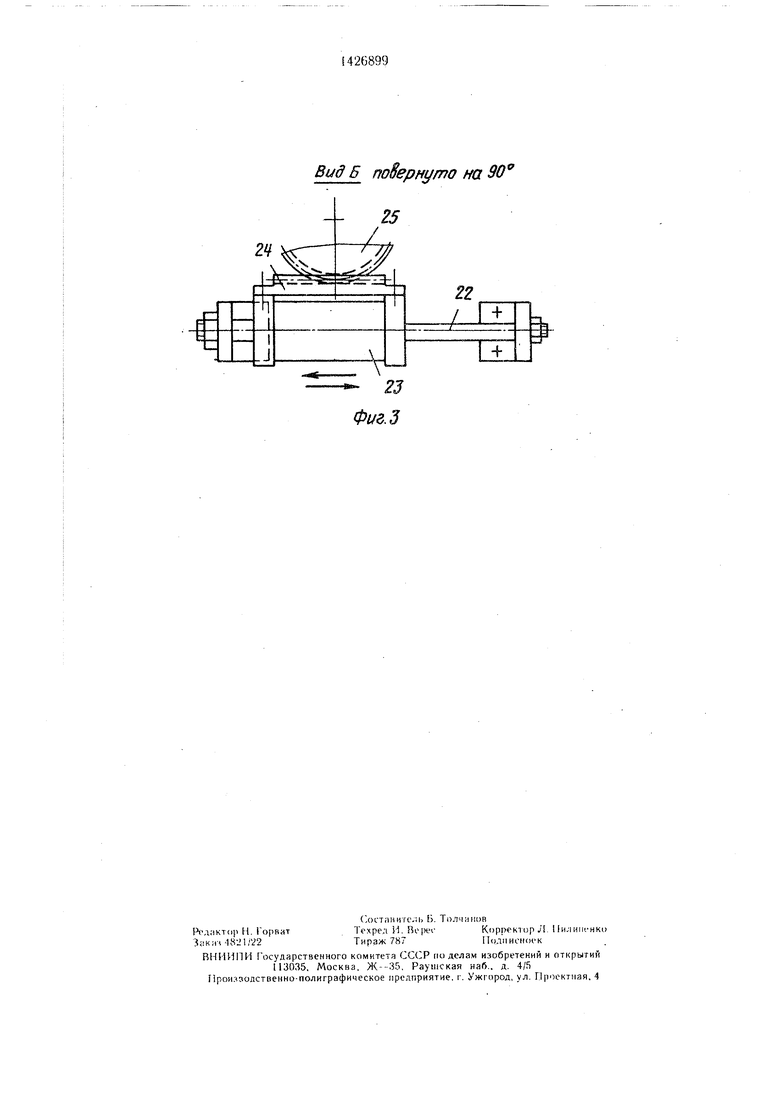
Грузоподъемный механизм состоит из пневмоцилиндра 21 подвижного стола и узла поворота подвижного стола, выполненного fl виде пневмоцилиндра, состоящего из жестко закрепленного щтока 22, по которому пе- ремещается гильза 23 с закрепленной на ней зубчатой рейкой 24, и шестерни 25.
Устройство для загрузки люлек подвесного конвейера работает следующим образом.
С ленточного конвейера щтучный груз поступает на рольганг и удерживается роликами 14 питателя. При подходе пустой люльки подвесного конвейера в зону перегрузки автоматически приводится в действие командоаппарат. При повороте распре- делительного вала 3 командоаппарата, приводимого в движение от электродвигателя 4 посредством клиноременной передачи 5, первый кулачок 6 включает пневмораспреде- литель 9 пневмоцилиндра питателя. Шток пневмоцилиндра питателя выдвигается вверх и повертывает двуплечий рычаг 12 питателя. При этом свободно вращающиеся ролики 14 опускаются, а свободно вращающиеся ролики 15 поднимаются, задерживая дальнейшее продвижение следую-- щего штучного груза с подающего ленточного конвейера.
После опускания свободно вращающихся роликов 15 питателя щтучный груз свободно перемещается по наклонному рольгангу 2 вниз до роликов 17 площадки 16 под- вижного стола в зону перегрузки. После поступления штучного груза в зону перегрузки от второго кулачка 7 командоаппарата включается пнёвмораспределитель 10 пневмоцилиндра 21. Шток пневмоцилиндра 21 поднимает площадку 16 подвижного стола вместе со штучным грузом в верхнее положение. При подъеме площадки 16 подвижного стола груз, находящийся на рольганге, опускает нажимной ролик 19 и поворачивает рычаг 18. При этом прижим- ной ролик 20 поднимается и прижимает
фуз к роликам 17 площадки 16 подвижного стола и предотвращает таким образом штучный груз от сползания. По окончании подъема площадки 16 подвижного стола от третьего кулачка 8 командо- аппарата включается пневмораспределитель 11 узла поворота подвижного стола. При этом гильза 23 с закрепленной на ней зубчатой рейкой 24 перемещается по жестко закрепленному щтоку 22. При движении гильзы 23 с закрепленной на ней зубчатой рейкой 24, а последняя входит в зацепление с щестерней 25, происходит поворот пневмоцилиндра 21 вместе с площадкой 16 подвижного стола на заданный угол.
При совмещении площадки 16 подвижного стола и дна люльки подвесного конвейера от второго кулачка 7 командо- аппарата посредством пневмораспределите- ля-10 происходит опускание площадки 16 подвижного стола со щтучным грузом. Площадка 16 подвижного стола, опускаясь, проходит сквозь дно люльки подвесного конвейера И тем самым совершает перегрузку штучного груза с площадки 16 в люльку подвижного конвейера.
После прохождения площадки 16 подвижного стола сквозь дно люльки подвесного конвейера от третьего кулачка 8 командо- аппарата включается пневмораспределитель
зла поворота подвижного ria о5- ратный ход. При этом проясходит пово-, рот площадки 16 в исходное положение с одновременным опусканием последней в нижнее исходное положение.
При помощи первого кулачка 6 коман- доаппарата происходит возвращение питателя в и- ходное положение и цикл пов- торяется.
Формула изобретения
Устройство для загрузки люлек подвесного конвейера, включающее наклонный рольганг с щарнирно установленным прпводным от силового цилиндра питателем и расположенный в зоне перегрузки подвижный от механизма подъема стол с ограничительным упором на его приемной площадке и фиксатором груза, отличающееся тем, что, с целью повышения надежности
работы устройства за счет исключения сползания груза с приемной площадки при выполнении ее поворотной, фиксатор груза выполнен в виде щарнирно установленного на приемной площадке неравноплечего рычага с отогнутыми вверх концами и установленными по концам прижимным и нажимным от груза роликами, при этом последний установлен на меньшем плече неравноплечего рычага, расположенного со стороны ограничительного упора.
3 И № 9 Фие.2
Вид Б поЗернуто на 90
Фиг.З
| 0 |
|
SU329086A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Ивановский К | |||
| Е | |||
| и др | |||
| Перегрузочные устройства конвейеров штучных гру- SOB | |||
| М.: Машиностроение, 1966, с | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
