(54) СПОСОБ ПЕРЕДВИЖЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА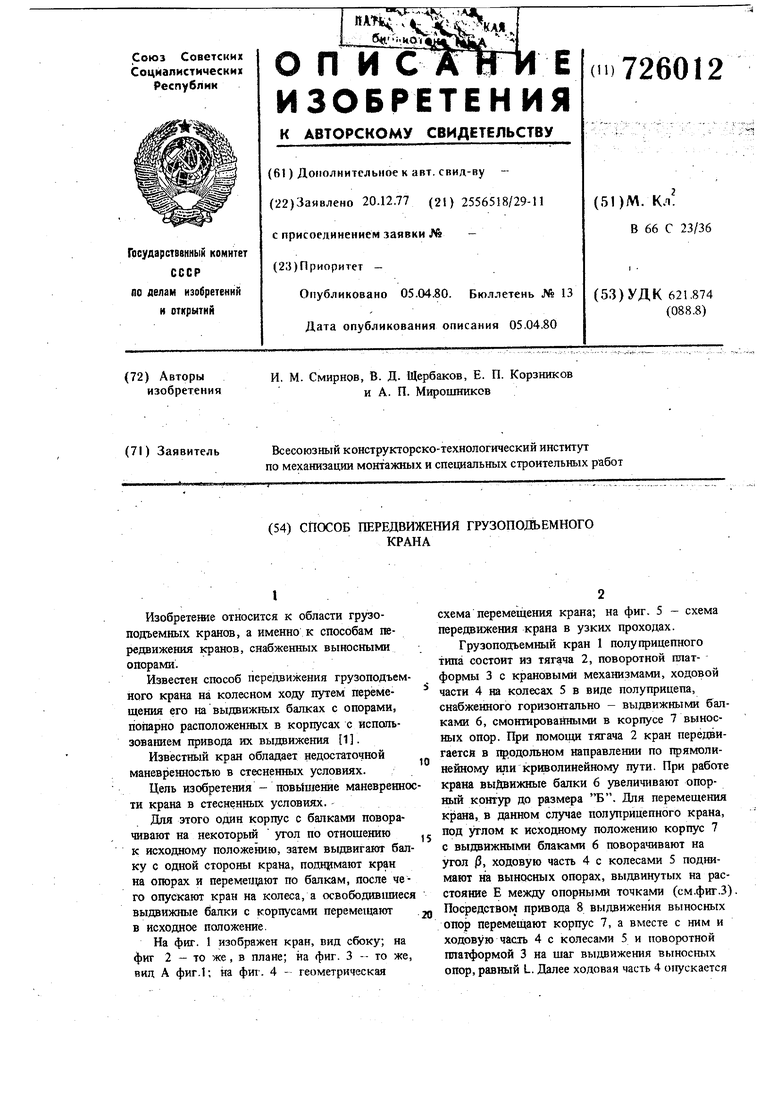
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ передвижения грузоподъемного крана | 1973 |
|
SU489712A1 |
| Грузоподъемный кран на колесном ходу | 1973 |
|
SU540807A1 |
| Грузоподъемный кран на колесном ходу | 1977 |
|
SU737349A1 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2015 |
|
RU2599741C2 |
| МАШИНА ДЛЯ ВЫЛИВКИ, ТРАНСПОРТИРОВКИ И ПЕРЕЛИВКИ МЕТАЛЛА | 2021 |
|
RU2772772C1 |
| Выносная опора грузоподъемной машины | 2022 |
|
RU2787541C1 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2012 |
|
RU2495816C1 |
| Способ съема и установка на тягач стрелы самоходного крана | 1982 |
|
SU1133225A1 |
| Устройство передвижения прицепного одноосного экскаватора | 1989 |
|
SU1714053A1 |
| СПОСОБ ПОГРУЗКИ САМОХОДНОЙ ТЕХНИКИ НА ЖЕЛЕЗНОДОРОЖНУЮ ПЛАТФОРМУ И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2229993C2 |
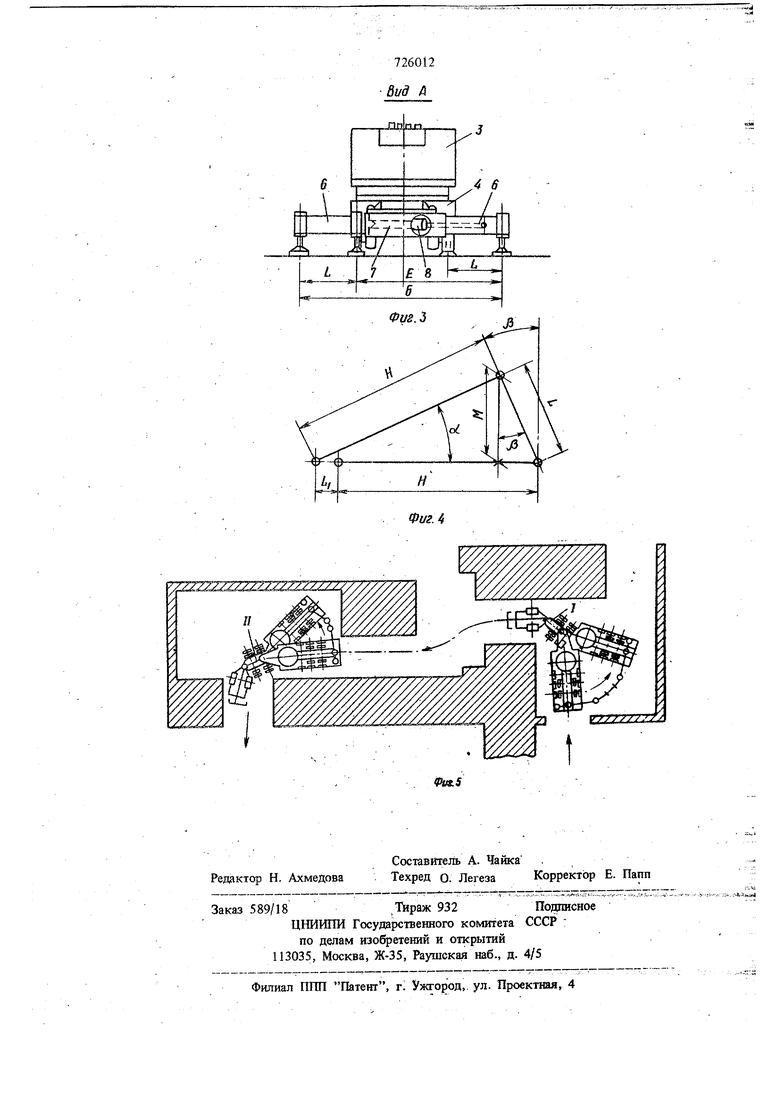
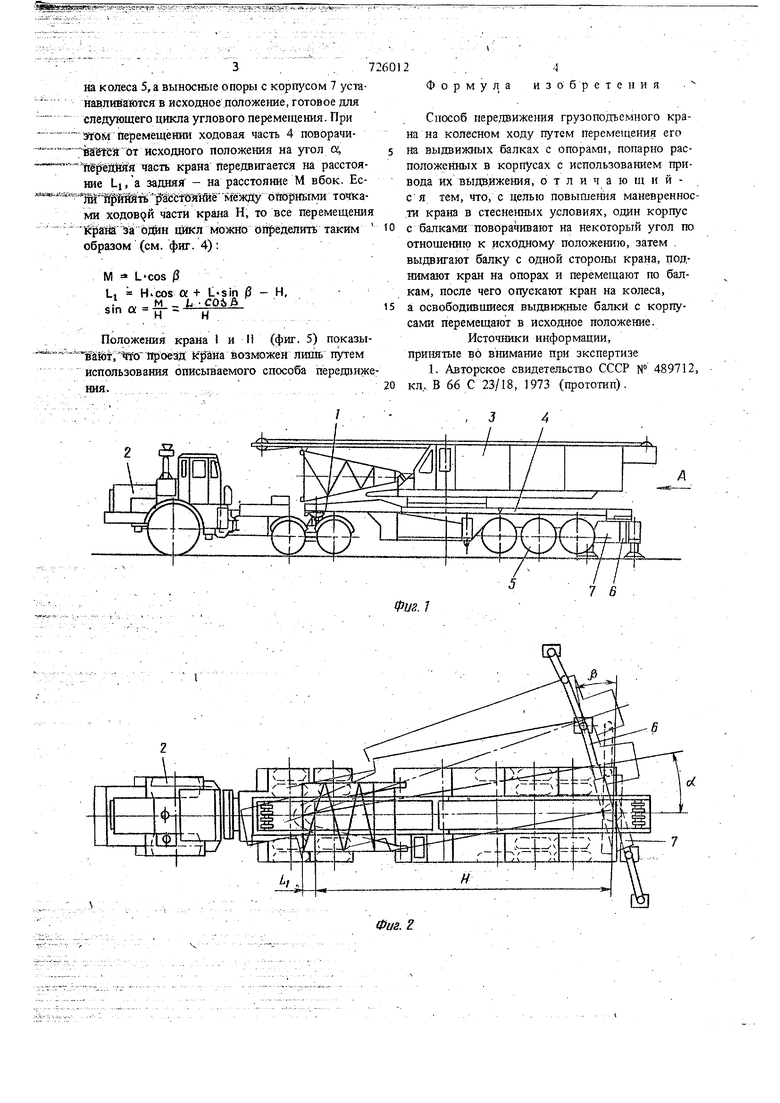
Изобретение относится к области грузоподъемных кранов, а именно к способам передвижения кранов, снабженных выносными опорами. Известен способ передвижения грузоподъем ного крана на колесном ходу путем перемещения его на выдвижных балках с опорами, noiiapHO расположенных в корпусах с использованием привода их выдвижения 1. Известньш кран обладает недостаточной маневренностью в стесненных условиях. Цель изобретения - повышение маневренно ти крана в стесненных условиях. Для этого один корпус с балками поворачивают на некоторый угол по отношению к исходному положению, затем выдвигают бал ку с одной стороны крана, подщ1мают кран на опорах и переметщют по балкам, после чего опускают кран на колеса, а освободившиес выдвижные балки с корпусами перемещают в исходное положение. На фиг. 1 изображен кран, вид сбоку; на фиг 2 - то же, в плане; на фиг. 3 -- то же вид А фиг.1; на фш. 4 - геометрическая схема перемещения крана; на фиг. 5 - схема передвижения крана в узких проходах. Грузоподъемный кран 1 полу прицепного типа состоит из тягача 2, поворотной платформы 3 с крановыми механизмами, ходовой части 4 на колесах 5 в виде полуприцепа, снабженного горизонтально - выдвижными балками 6, смонтированными в корпусе 7 выносных опор. При помощи тягача 2 кран передвигается в гфодольном направлении по прямолинейному или криволинейному пути. При работе крана выдвижные балки 6 увеличивают опорный контур до размера Б. Для перемещения крана, в данном случае полупридепного крана, под углом к исходному положению корпус 7 с выдвижными блаками 6 поворачивают на угол |3, ходовую часть 4 с колесами 5 поднимают на выносных опорах, выдвинутых на расстояние Е между опорными точками (см.фиг.З). Посредством привода 8 выдвижения выносных отгор перемещают корггус 7, а вместе с ним и ходовую часть 4 с колесами 5 и поворотной платформой 3 на шаг выдвижения выносных опор, равный L. Далее ходовая часть 4 опускается
. .3 .,.,7;
щ колеса 5,а выносные опоры с корпусом 7 yciaнавливайтся в исходное положе1ше, готовое для следующего цикла углового перемещения. При зггом перемещеню ходовая часть 4 поворачи easteift от исходного положения на угол о, %ё Ш1ййя часть крана Передвигается на расстояние LI, а задняяГ - на расстояние М вбок. Ес Ш1грШта раШт Шше между опорными точками ходовдй части крана Н, то все перемещения ; цикл можно о фёделш таким образом (см. фиг. 4):
Lcos (3
М
L-sin /3
Htcos а 1-1 L coi и
sin ex
H
Положения крана 1 и М (фиг. 5) показы айтгГч оПроезд kpuHa возможен лить путем Использования описываемого способа передвижения.
:6012
Формул а изобретения
Способ передвижения грузоподъемного крана на колесном ходу путем перемещения его
на выдвижных балках с опорами, попарно расположенных в корпусах с использованием привода их выдв.ижения, отличающийся тем, что, с целью повышегшя маневреннос.ти крана в стесненных условиях, один корпус
с балкащ поворачивают на некоторый угол по отнощению к исходному положению, затем . выдвигают балку с одной сторотг крана, поднимают кран на опорах и перемещают по балкам, после чего опускают кран на колеса,
а освободивщиеся выдвижные балкИ с корпусами перемещают в исходное положение.
Источники информации, при1еттые во вга1мание при экспертизе
кл, В 66 С 23/18, 1973 (прототип). 8ид 4
