1
Р1звестен способ передвижения грузоподъемного крана с аутригерами, заключающийся в перемещении его с помощью колесного ходового устройства по прямолинейному или криволинейному пути.
Цель изобретения - обеспечение поперечного перемещения крана и повышение его маневренности при работе в стесненных условиях.
Эта цель достигается тем, что кран вывеН1ивают эксцентрично на аутригерах, выдвинутых в сторону перемещения, и перекатывают но горизонтальным балкам с помощью их механизма выдвижения; затем кран опускают на колеса, а освобожденные горизонтальные балки аутригеров перемещают в исходное положение для совершения следующего цикла перемещения крана.
На фиг. 1 изображен кран, вид сбоку; на фиг. 2 - то же, в плане; на фиг. 3-10 - взаимные положения крана и аутригеров в процессе бокового шагового передвижения; на фиг. 11 - схема предложенного способа передвижения крана, в плане.
С помощью ходового устройства 1 кран 2 на колесах 3 передвигают в продольном направлении по прямолинейному или криволинейному пути. При работе он вывешивается на аутригерах 4, которые за счет выдвижения горизонтальных балок 5 и вертикальных опор
6 создают крану увеличенный опорный контур Ai-B.
При одностороннем выдвижении балок кран стоит эксцентрично с опорным контуром ,
который используется для бокового передвижения крана.
В исходном положении кран 2 стоит на колесах 3 со вдвинутыми в транспортное положение (размер АЗ) аутригерными балками
5 и поднятыми опорами 6.
Для осуществления дополнительного бокового передвижения крана балки одного борта выдвигаются на полный вылет и кинематически блокируются с задвинутыми балками противоположного борта, образуя подвижный относительно крана аутригерный мост 7 с пролетом AZ. После опускания опор 6 и вывешивания колес 3 кран располагается в вывешенном положении у одной из опор ассиметрично относительно аутригерного опорного конту/
ра с зкснентрнситетом е -.
2
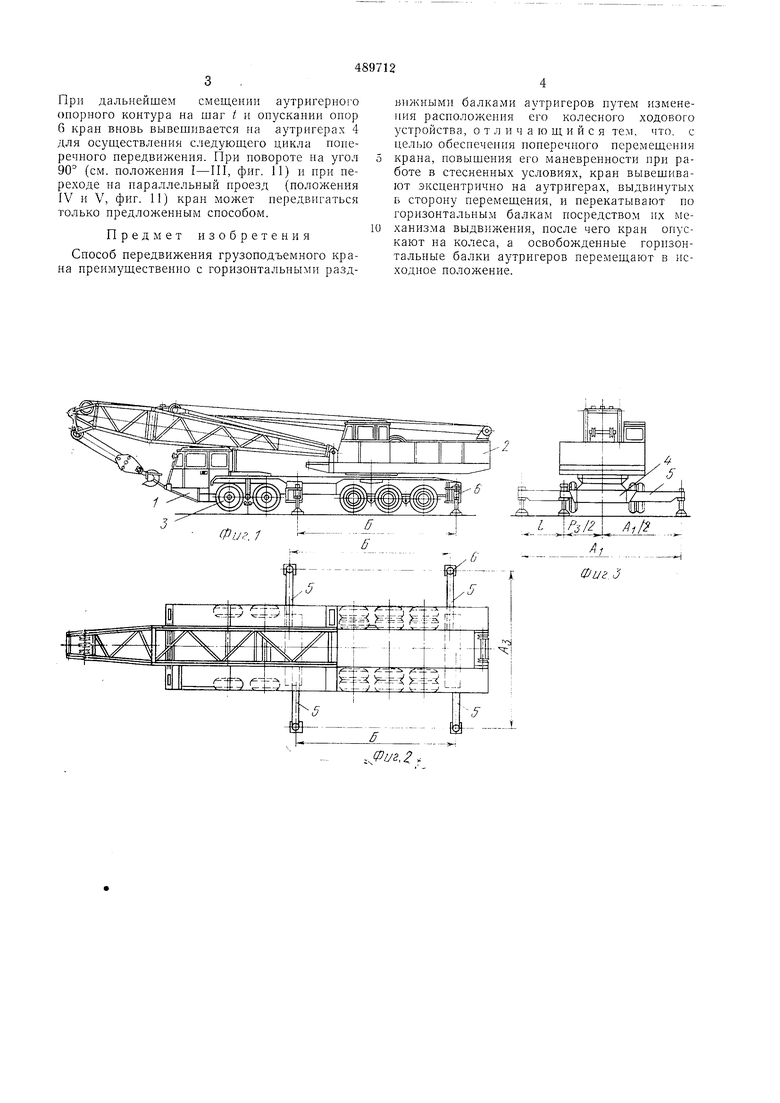
При включении механизма обратного вдвижения выдвинутых балок 5 вывешенный кран перемещается вбок по неподвижному горизонтальному аутригерному мосту 7 к противоположной опоре, осуществляя боковое передвижение на шаг t 2e l и опускается на колеса 3 с вывешиванием опор 6 аутригеров 4.
При дальнейшем смещении аутригерного опорного контура на шаг t и опускании опор 6 кран вновь вывешивается на аутригерах 4 для осуш,ествления следуюш,его цикла поперечного передвижения. При повороте на угол 90° (см. положения I-1П, фиг. 11) и при переходе на параллельный проезд {положения IV и V, фиг. 11) кран может передвигаться только предложенным способом.
Предмет изобретения
Способ передвижения грузоподъемного крана преимуш.ественно с горизонтальными раздвижными балками аутригеров путем изменения расположения его колесного ходового устройства, о т л и чающийся тем, что, с целью обеспечения поперечпого перемещения крана, повышения его маневренности при работе в стесненных условиях, кран вывешивают эксцентрично на аутригерах, выдвинутых Б сторону перемещения, и перекатывают по горизонтальным балкам посредством их механизма выдвижения, после чего кран опускают на колеса, а освобожденные горизонтальные балки аутригеров перемещают в исходное положение.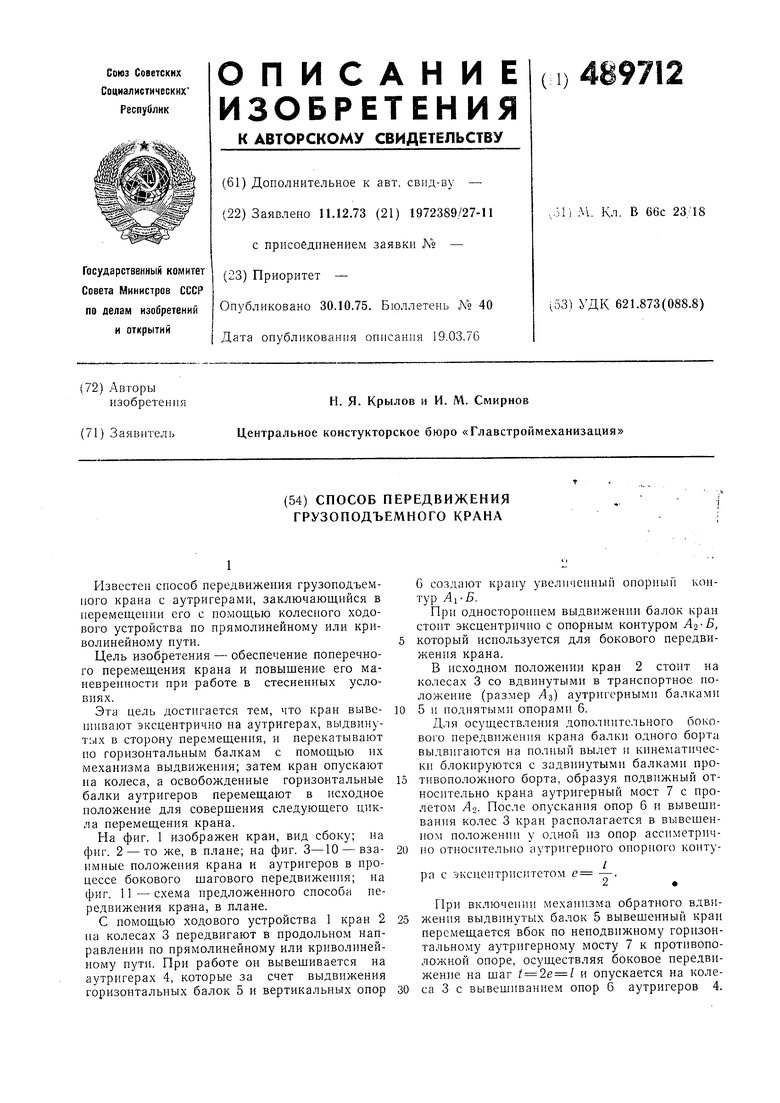
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемный кран на колесном ходу | 1973 |
|
SU540807A1 |
| Способ передвижения грузоподъемного крана | 1977 |
|
SU703489A2 |
| Грузоподъемный кран на колесном ходу | 1977 |
|
SU737349A1 |
| I БИ&ЛИСГГЕНААвторыБ. И. Левин и П. К. Мороз | 1973 |
|
SU381599A1 |
| Способ передвижения грузоподъемного крана | 1977 |
|
SU726012A1 |
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2259280C1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО КРАНА С ПЕРЕМЕННОЙ КОЛЕЕЙ | 2004 |
|
RU2266841C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
| ОСНОВАНИЕ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2207318C2 |
| АВТОМОБИЛЬНЫЙ КРАН | 2006 |
|
RU2341444C2 |

; у,сриг, Z. k.: I J у J -51 1
(Риг.Э
Q
I
Wd--t-L Аз/г
Аг
срцгЛ
tkjll AZ
10
