(54) БЕЗОПАСНЫЙ ПОЛИСПАСТ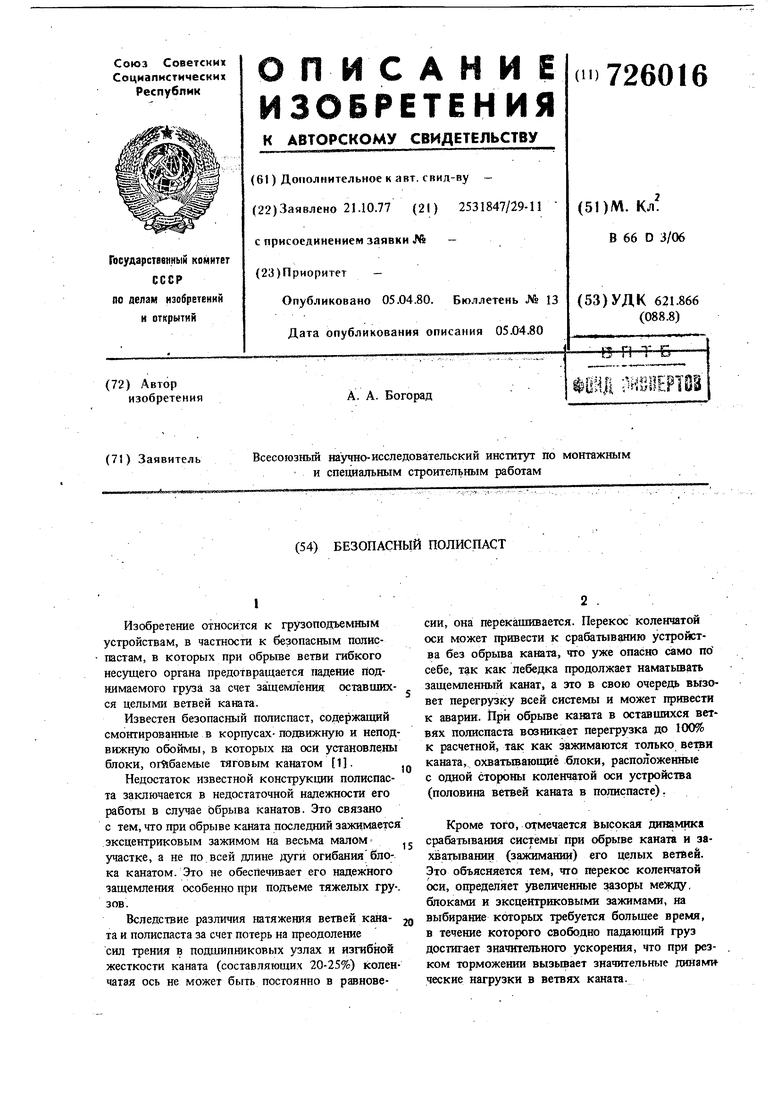
| название | год | авторы | номер документа |
|---|---|---|---|
| Безопасная полиспастная подвеска | 1971 |
|
SU437703A1 |
| БЕЗОПАСНЫЙ КАНАТНЫЙ ПОЛИСПАСТ | 2004 |
|
RU2266860C1 |
| Предохранительное устройство для удерживания грузозахватного органа с тросовым подвесом | 1990 |
|
SU1782924A1 |
| Безопасный полиспаст | 1975 |
|
SU527376A1 |
| Безопасный полиспаст | 1976 |
|
SU549412A1 |
| Полиспастная подвеска | 1986 |
|
SU1409581A1 |
| Безопасный полиспаст | 1974 |
|
SU488779A1 |
| Безопасный полиспаст | 1972 |
|
SU461896A1 |
| Устройство для разворота крюка крана | 1978 |
|
SU779259A1 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
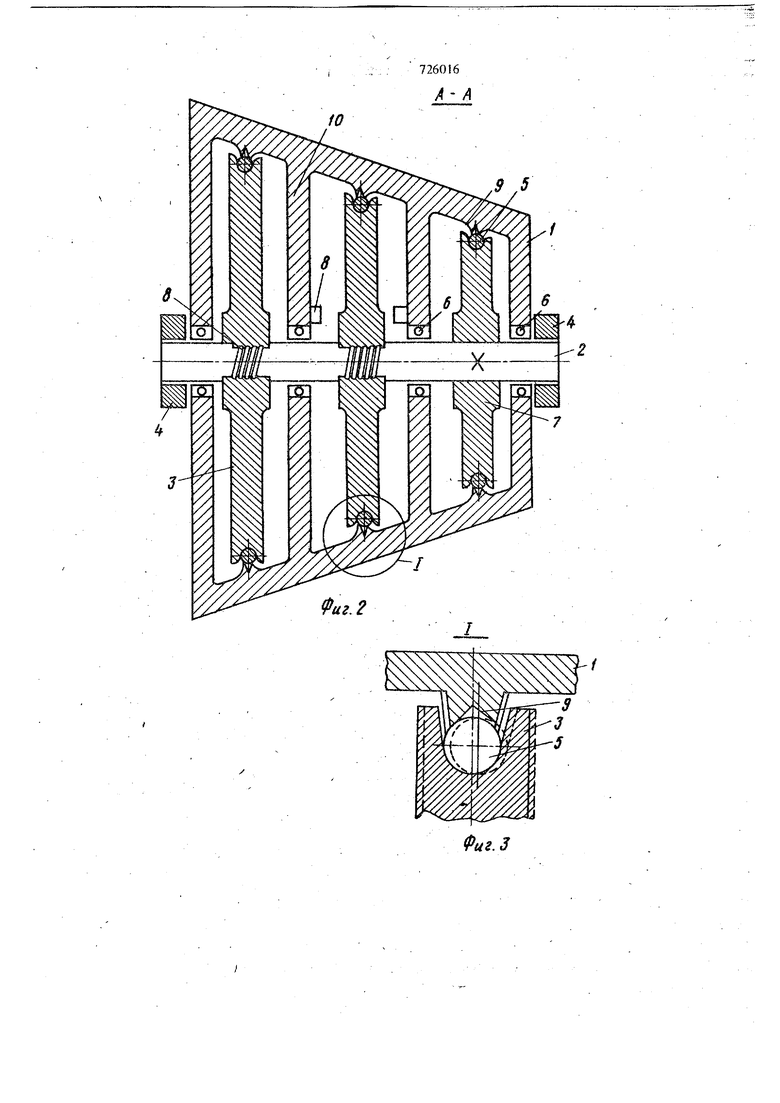
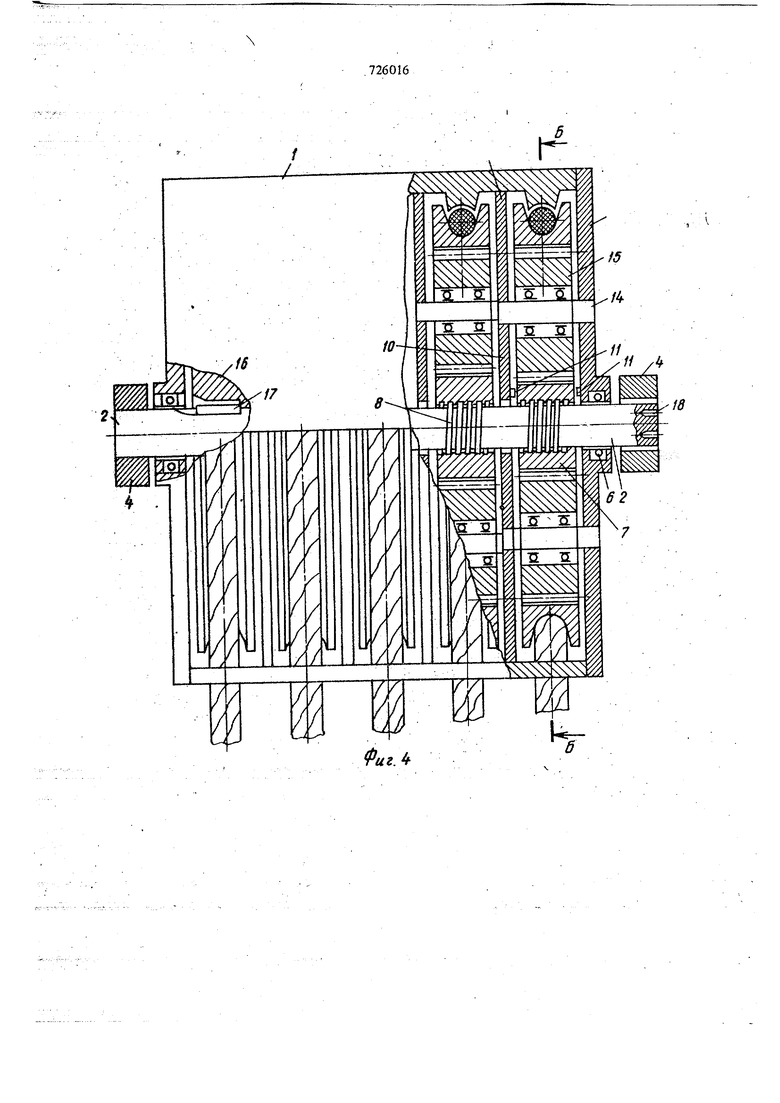

Изобретение относится к грузоподъемным устройствам, в частности к безопасным полисластам, в которых при обрьгое ветви гибкого несущего органа предотвращается падение поднимаемого груза за счет защемления оставшихся целыми ветвей каната. Известен безопасный полиспаст, содержащий смонтированные в корпусах- подвижную и непод вижную обоймы, в которых на оси установлены блоки, огибаемые тяговым канатом 1. Недостаток известной конструкции полиспаста заключается в недостаточной надежности его работы в случае обрыва канатов. Это связано с тем, что при обрыве каната последний зажимается зксцентриковым зажимом на весьма маломучастке, а не по.всей длине дуги огибанияблока канатом. Это не обеспечивает его надежного защемлегам особенно при подъеме тяжелых гру-. зов. Вследствие различия натяжения ветвей каната и полиспаста за счет потерь на преодоление сил трения в подшипниковых узлах и изгибной жесткости каната (составляющих 20-25%) коленчатая ось не может быть постоянно в равновесии, она перекашивается. Перекос коленчатой оси может привести к срабатыванию устройства без обрыва каната, что уже опасно само по себе, так как лебедка продолжает наматьшать защемленный канат, а это в свою очередь вызовет перегрузку всей системы и может привести к аварии. Йри обрыве каната в оставшихся ветвях полиспаста возникает перегрузка до 100% к расчетной, так как зажимаются только ветви каната, охватьшающиё блоки, расположенные с одной стороны коленчатой оси устройства (половина ветвей каната в полиспасте). Кроме того, отмечается высокая динамика срабатывания системы при обрыве каната и захватывании (зажимании) его целых ветвей. Это объясняется тем, что перекос коленчатой оси, определяет увеличенные зазоры между, блоками и эксцентриковыми зажимами, на выбирание которых требуется большее время, в течение которого свободно падающий груз достигает значительного ускорения, что при резком торможении выэьгаает значительные динам ческне нагрузки в ветвях каната. Целью изобретеШя яйляется пов)1ше1ше - ™ --j r-j:j -™-jj - .| при обрьгее каната. Для этого один из блоков каждой обоймы ЭДг|Ш й ШЬсй-НёШйй)кно/ адруг - с 1йШ(зШ10сйй бсёвого перемещ1енияГ при этом ступицы подвижных бло.ков и ось взаимосвязан между собой посредством вйШбвоГо Шбдйнения, а на внутренней стороне корпуса каждой обоймы, в Ш1ОСКОСТИ желоба каждого блока, вьшолнены клиновидные упоры. Кроме того, по обе стороны ступицы одного иэ подаижных блоков могут быть размещены зИёКТрбйЁгнИтные датчики, подключаемые к це щ питания подъемной лебедки, а блоки могут содержать ступииу с зубчать1М венцом на ее наружной поверхности и обод с зубчатым венцом га внутренней пбве|)хнЬсти, а на корпусе каждой обоймы могут быть жестко закреплены оси С шестернями, взаимодействующими с зубч тыми венцами ступицы и обода. На фиг, 1 показана обойма полиспаста, об,щий вид; на фиг. 2 - сечение А-А фиг.1; на фиг. 3 - узел t на фиг. 2; На фиг. 4 - вари Гант конструктивного выполнегшя обоймЫ мноioRpatKorb полиспаста; на фиг. 5 - разрез Б-Б фиг.4; на фиг. 6 - схема запасовки полиспаста. , . Безопасный полиспастСодержит одинаковой конструкции неподвижную и подвижную обоймы с установленными в них блоками. Каждая обойма состоит из корпуса 1, оси 2, блоков 3, подвески 4 и гибкого несущего органа, например кагата 5, В связи с тем, что линейШй скорости Движения разных ветвей (Шс1аста {йзл1ийг, угДбвыЬ скорости блоков (ступиц блоков) также различны. Для обеспечения принципа равенства угловых скоростей всех блоков, заложенного в предлагаемую конструкцию, блоки полиспаста выполняются разного диаметра.. Ось 2 установлена в корпусе 1 на радиальных подшшшиках 6, допускающих его н езначительное осевое смещение (порядка 3-5 мм). Один из блоков, например крайний слева, жест ко соеддаен с осью 2 на шпонке, а остальные блйкйусишвленб с 1озмояотосйю рс вЪго смещения по винтовой резьбе, выполненной на оси 2 и ступицах. 7 этих блоков, образующих совместно винтовые пары 8 с равным шагом резьбь ;--:- - :- . - -:.-. Й1Я фиксации блоков 3 при срабатьшании circfeftfirrai корпусе имеются клиновые упоры вьшолненные по дуге ручья желоба блока с уг лом наютона, не прёшшаюпщКГ уг011 сам6торможения, и снабженные фрикционными накладка ми для увеличения сил трения. Между торцами стутац одного из блоков, шпример среднего, и промежуточными опорами 10 корпуса Густа 6. -1. новлень: электромагнитные датчики 11, прелназМЧённые для отключения питания подъемной лебедки, сигнализации о значительном изменении угловых скоростей отдельных роликов вследствие чрезмерного износа ручья желоба или заедания подшипникового узла. Полиспаст такой конструкции с блоками разного диаметра и малой кратности целесообразно применять в стационарных установках, таких как мостовые KpaHbi,где навивка каната на барабан лебедки осуществляется двумя концами. Для поднятия тяжеловесного груза приме- няют многократные полиспасты. Однако при вьшолненийПЬлиспас1а многократнымон получзется .весьма громоздким и тяжеловесным, что затрудняет или ограничивает его применение в стесненных условиях монтажа, например при небольщих монтажных проемах. Предусмотрены вариант конструкции многократного полиспаста обычных габаритов, в котором все блоки 3 вьшолнены одинакового диаметра, а ступицы 7 этих блоков имеют одинаковые угловые скорости (см. фиг. 4 и 5). Это до- , ст;игается тем, что га внутренней поверхности ободов и Наружной поверхности ступицы 7 каждого блока 3 (кроме одного крайнего, жестко соед)шеняого с осью 2) выполнены индивидуальные зубчатые венцы 12 и 13, между которыми на осях 14, жестко закрепленных в корпусе 1 обоймы, размещены шестерни 15. Число зубьев, обода, ступицы и щестерен каждого блока определяется расчетом из условия обеспечения равенства угловых скоростей всех ступиц 7. . . Удобство и технологичность сборки безопасного полиспаста обеспечивается. соединением крайнего слева блока с осью 2 при помощи . шпонки 16, упирающейся в выступ 17 ступицы, блока. Для регулировки положения оси 2 относительно блока и ступиц 7 (путем вращения оси 2) служат отверстия 18 под ключ. Шпонка 16 вставляется в гйездо после сборки полиспаста и регулировки положения оси 2, переД установкой подшипни1 а последнего и подвески 4. Полиспаст работает следующим образом. При нормальной эксплуатации полиспаста сгупицьг 7 всех блоков и соединяющая их ось 2 вращаются в одном направлении с равными угловыми скоростями. В случае обрьш одной ветви каната 5 груз начинает падать при сохранении равенства мгновенных угловых скоростей всех блоков, кроме огибаемого раздушившейсяветвью канату 5. Угловая скорость последнего, например крайнего правого блока, будет меньше или даже равна нулю. При этом остальные блоки 3 начнут медленно перемещаться по оси 2, как гайки 57 по винту, обеспечивая плавное защемление ветвей канатов между внутренними поверхностями желобов блоков 3 и клиновыми упорами 9. Это вызывает взаимное заклинивание всех блоков и защемление уцелевших ветвей. В случае обрьта каната 5, как правило на 1-11Г блоках (фиг. 6) около ходовой ветви, указанное равенство нарушается. Так при о6рьше , например на блоке III, груз начинает равноускоренно падать вню. Направление враще1шя и угловые скорости ступиц 7 блоков iV-X в любой отрезок времени равны между собой, кроме блока 111, который, не испытьшая принудит гльного вращения от каната 5, тормозится. Блоки I и IT, жестко соединешшге с осями 2, под действием падаипцего груза вращаются в направлении, противоположном направлению вращения блоков Ij-X с той же угловой скоростью. При этом блоки начнут перемещаться вдоль осей 2 (см. фиг. 6) до соприкосновения ветвей каната 5 с клиновидными упЬрами 9 и дальнейшего их зажима. При обрьше каната на любом из блоков IV-X вращение всех блоков осуществляется также в направлении, притивопшожном направлению вращения блоков Т-П. В случае разрушения каната на крайних блоках Г или Т Г последние, лищенные принудительного воздействия стороны каната 5, тормозятся, что при сохранении постоянства величин угловых скоростей вращения остальных блоков вызовет их осевое смещение по неподвижной оси 2 и, соответственно, Ущемление целевых ветвей каната полиспаста. Схема работы безопасного полиспаста сохраняется неизменной при обрыве любой ветви каната. Важно, чтобы угловая скорость хотя бы одного из элементов системь отличалась от остальных. Для повышения надежности работы безопасного полиспаста целесообразно применять обе обоймы, неподвижную и подвиж ную указанной конструкции. . В начальный момент срабатьгоаяия системы гри осевеЯи смещении блоков боковая поверхность одного из них воздействует на электромагнитный датчик 11, отключающий питание подъемной лебедки и сигнализирующий о возникновении аварийной ситуации. Под аварий.,ной ситуацией подразумевается не только обрь ветви каната, но и незначительное измененда угловых скоростей вращения отдельных блоков вследствие чрезмерного, износа ручья желоба или заедания подшипникового узла. При этом отключение тяговой л ебедки полиспаста щхжсходит раньше, чем взаимное осевое смещение блоков приведет к их заклиниванию. Поскольку направление взаимного ос«вого смещения блоков обоймы зависит от расположения оборвавшейся ветви тягового органа в системе на промежуточной , опоре коргуса обоймы установлены два электромагнитные датчкика И по обе стороны от блока. Данная конструкщм безопасного далиспаста является более надежной в работе, как как защемляются все оставпшеся ветви каната и их фиксация происходит по всей длине дуги жело-, ба блока, охватьтаемого канатом. i Возможно совместное применение таких обойм в качестве подвижной одной полиспаствой системы, что также пюысит ее надежность и плавность работы. Наличие в конструкции блока электромагнитных датчиков, снгкалишру ющих о возткяовенни неисправностей и трушений нормальното режима эксппуатацим снстемы, обеспечит безаварийное производство монтажных работ. Формула изобретения 1.Безопасный полиспаст, содержшцнк смонтиованные в корпусах подакжную к неподвижную обоймы, в которых иа оси установлены блоки, огибаемые тяговым канатом, отличающийся тем, что, с целью повьшкния надежностии плавности срабатывания при каната, один из блоков каждой обоймы закреплен на оси неподвижно, а другие - возмож- . ностью осевого перемещения, при этом ступицы подвижных блоков и ось взаимосвязаны между собой посредством винтового соединения, а на внутренней стороне корпуса каждой обоймы, в плоскости желоба каждого блока, вьшолнены клиновидные упоры. 2.Безопасный полиспаст ю п. 1, о т л и ч а ю ш и и с я тем, что по обе стороны стугопи одного из подвижных блоков размещены элёктромагшпнью датчики, подключаемые к цепи (штания подъемной лебедки. 3.Безопасный полиспаст по п. 1, о т л и ч а ю щ и и с я тем, что блоки содержат стугащу с зубчатым венцом на ее наруткной поверхности н обод с зубчатым венцом на внутренней поверхности, а на корпусе каждой обоймы жестко закреплены оси с шестернями, взаимодействующими с зубчатыми венцами стугаяКы и обода. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 254042, кл. В 66 С 15/02,1970 (прототип).
-A , --.. /
Фиг. 2
Фиг.З
ФигЛ
