Изобретение относится к автоматической балансировке шлифовальных кругов в процессе их вращения во время холостых режимов работы или шлифования. Известны устройства для автоматической балансировки шлифовальных кругов, содержащие корректирующие грузы, установленные на балансируемом шлифовальном крута, последовательно соединенные датчик вибрации, схему определения дисбаланса и блок коммутации, связанный с корректирующими грузами l . Недостатком таких устройств является низкая точность балансировки и малая помехоустойчивость. Наиболее близким к изобретению по. технической сущности и достигаемому результату является устройство для автоматической балансировки щлифовальных кругов, содержащее корпус, закрепленные в нем привод для вращения шлифовального круга и датчик вибрации, схему определения дисбаланса, состоящую из измерительного усилителя и детектора, и экстремальный регулятор, включающий пороговый блок, блок коммутации и корректирующие грузы Г2 . Однако экстремальный регулятор устройства работает в зоне порога срабатывания порогового блока, поэтому в его выходном сигнале всегда присутствует внещняя помеха, что вызывает ложные переключения корректирующих грузов, а следовательно, снижает точность балансировки. Цель изобретения - повышение точности балансировки. Для этого в предлагаемом устройстве экстремальный регулятор снабжен амплитудным дискриминатором, вход которого связан с выходом детектора, а выход - с блоком коммутации, следящей системой, соединенной с амплитудным дискриминатором, вторым пороговым блоком, управляющим триггером и двумя схемами совпадений, входы обеих пороговых блоков связаны с выходом детектора, выходы с входом управляющего триггера, входы
схемы совпадений подключены к выходам амплитудного дискриминатора, блока коммутации и управляющего триггера, а выходы - с корректируюгцими грузами.
Следящая система устройства может быть выполнена в виде последователь но соединенных электронного ключа, интег рирующей цепи и согласующего инвертирующего усилителя, а блок коммутации в ввде двух последовательно соединенных триггеров.
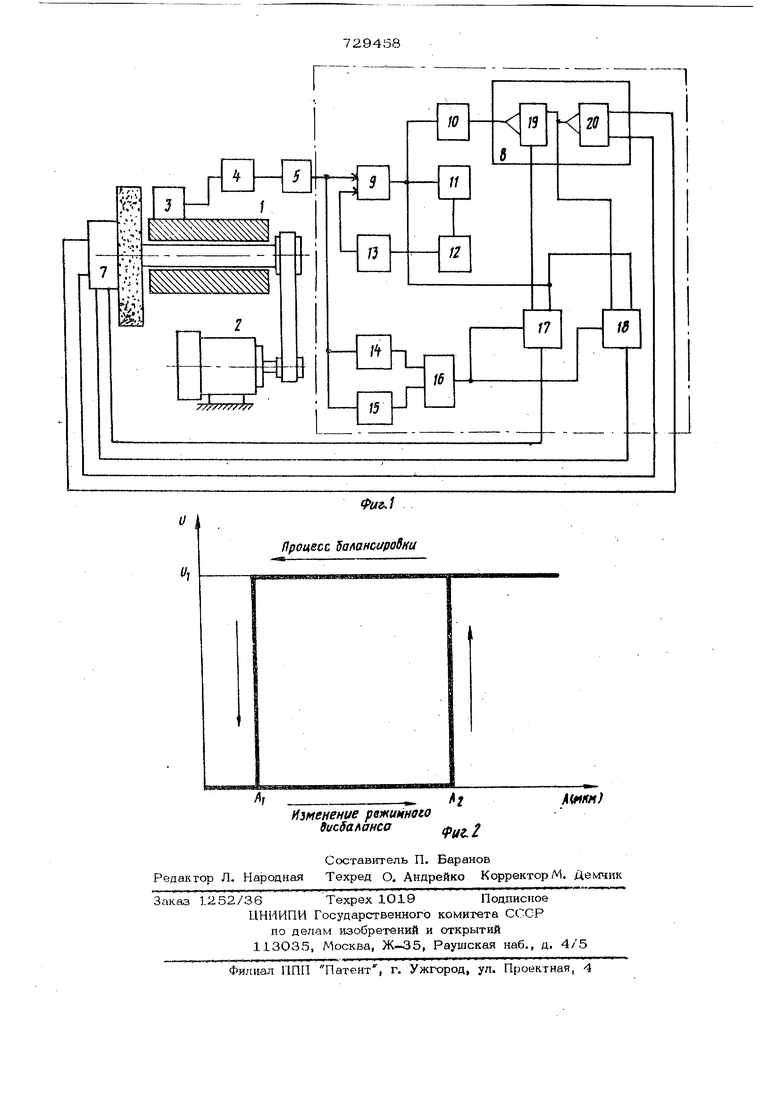
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - характеристика работы порогового блока. Устройство содержит корпус 1, закрепленный в нем привод 2 для вращения шлифовального круга и датчик 3 вибрации, схему определения дисбаланса, состоящую на последовательно соединенных измерительного усилителя 4 и детектора 5, и экстремальный регулятор 6. Экстремальный регулятор 6 содержит корректирующиегрузы 7д, установленные на валу шлифовального круга, блок 8 коммутации, амплитудный дискриминатор 9, первый вход которого связан с выходом детектора 5, а выход через формирователь 1О - с блоком 8 коммутации; следящую систему, выполненную в виде после довательносоединенныхэлектронногоключа ,11, интегрирующей цепи 12 и согласующего инвертирующего усилителя 13 и связанную с амплитудным дискриминатором 9J два пороговых блока 14, 15j управляющий триггер 16 и схемы 17, 18 совпадений. Входы пороговых блоков 14, 15 связаны с выходом детектора 5, выходы с входом управляющего триггера 16, Входы схем 17 и 18 совпадений подключены к выходам амплитудного дискриминатора 9, блока 8 коммутации и управляющего триггера 16, а выходы - к корректирующим грузам 7о Блок 8 коммутации состоит из двух последовательно соединенных триггеров 19 и 2О и также связан с корректирующими грузами 7. Работа устройства осуществляется сле 50 дующим образом..
При возникновении дисбаланса щлифовапьного круга в процессе его эксплуатации вибрации корпуса 1 воспринимаются датчиком 3 вибршши, усиливаются в измерительном усилителе 4 и преобразуются детектором 5 в постоянное напряжение, амплитуда которого пропорциональна
величине дисбаланса. С детектора 5 сигнал поступает на первый вход амплитудного дискриминатора 9, выход которопо через следящую систему соединен
с другим своим входом. Формирователь 10 служит для формирования импуль-са переключения режимов балансировки, поступающего на вход блока 8 коммутации. Сигнал с детектора 5 поступает также на пороговые блоки 14 и 15, служащие для формирования импульсов управления триггером 16, а следовательно, схемами 17 и 18 совпадений.
Пороговый блок 14 формирует импульс
ваются и корректирующие грузы 7 начинают перемещаться в противоположную сторону. Происходит уменьщение дисбала1нса и на выходе амплитудного дискриминатора 9 появляется напряжение, открывающее электронный ключ 11, через который осуществляется заряд интегри- при уровне дисбаланса большим уровня , а блок 15 при уровне дисбаланса меньше А (см. фиг. 2). Сигналы с выходов схем 17, 18 совпадений управляют положением корректирующих грузов 7, осуществляя коррекцию дисбаланса. При дисбалансе, превыщающим уровень А, пороговый блок 14, воспринимающий сигнал от датчика 3 вибрации через измерительный усилитель 4 и детектор 5, преобразовывает управляющий триггер 16, который открывает схемы 17 и 18 совпадений Vj . В зависимости от состояния триггера 19 блока 8 коммутации будет подано напряжение, управляющее переме- щением корректирующих грузов 7. Если в результате этого дисбаланс увеличивается (направление перемещения корректирующих грузов выбрано неправильно), то возрастает напряжение на первом входе амплитудного дискриминатора 9 и на его выходе появляется сигнал, управляющий формирователем 1О. В этом случает формирователь 1О выдает импульс, которым закрываются схемы 17 и 18, совпадений, процесс балансировки прекращается. Одновременно происходит переброс триггера 19 блока 8 коммутации и переключение корректирующих грузов 7. Интегрирующая цепь 12 начинает разряжаться через согласующий инвертирующий усилитель 13, а напряжение на втором входе амплитудного дискриминатора 9 до тех пор увеличивается, пока не станет равным напряжению на входе Вх1. Импульс с выхода формирователя 1О исче- зает, схемы 17 и 18 совпадений откры57рующей цепи 12. Это вызывает увеличенив напряжения на входе согласуюихего инвертирующего усилителя 13 и уменьшение сигнала на втором входе амплитудного дискриминатора О. Таким образом, происходит слежение за изменением напряжения на первом входе. При прохождении точки минимума дисбаланса происходит увеличение напряжения на первом вхо де, формирователь 10 выдает импульс, прекращающий балансировку и переключающий блок 8 коммутации. Процесс балансировки длится до тех пор, пока уровень дисбаланса не станет меньще А j (см фиг. 2). В этом случае пороговый блок 15 переключает управляющий триггер 16 и схемы 17 и 18 совпадения и отключает корректирующие грузы 7. Введение в экстремальный регулятор устройства для автоматической балансировки шлифовальных кругов амплитудного дискриминатора, следящей системы, второго порогового блока, управляющего трип- усилителя. гера и двух схем совпадений позволяет улучшить помехозащищенность устройства, что повышает точность балансировки. Формула изобретения Устройство для автоматической балансировки шлифовальных кругов, содержащее корпус, закрепленные в нем привод длр вращения шлифовального круга и датчик вибрации, схему определения дисбаланса состоящую из измерительного усилителя и детектора, и экстремальный регулятор, 586 включающий пороговый блок, блок коммутаьши и корректирующие грузы, о т - личающееся тем, что, с целью повыщения точности балансировки, экстремальный регулятор снабжен амплитудным дискриминатором, вход которого связан с выходом детектора, а выход - с блоком коммутации, следящей системой, соединенной с амплитудным дискриминатором, вторым пороговым блоком, управляющим триггером и двумя схемами совпадений; входь; обоих пороговых блоков связаны с выходом детектора, выходы с входом управляющего триггера, входы схем совпадений подключены к выходам амплитудного дискриминатора, блока ком- мутации и управляющего триггера, а выходы - с корректирующими грузами. 2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что следящая система выполнена в виде последовательно сое- диненных электронного ключа, интегрирующей цепи и согласующего инвертирующего 3. Устройство по п. 1, отличающееся тем, что блок коммутации выполнен в виде двух последовательно соединенных триггеров. Источники информации, принятые во внимание при экспертизе 1.Патент BeликoбpитaнииJ f 1212423, кл. F 16 f 15/22, 197О. 2.Горбунов Б. И. и др. Системы автоматического управления уравновеши- ванием шлифовальных кругЬв. - Сборник Электропривод и автоматизация в машиностроении, т. 24, вами, М., 1974 (прототип). Процесс SaMHCiJpoSHU
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической балансировки шлифовальных кругов | 1985 |
|
SU1270596A1 |
| Способ балансировки роторов и устройство для его осуществления | 1987 |
|
SU1430770A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| Устройство для правки шлифовальных кругов | 1978 |
|
SU686857A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| Устройство для автоматической балансировки шлифовального круга и способ настройки устройства для автоматической балансировки шлифовального круга | 1985 |
|
SU1462133A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |