ff /« ;г rff
yA/l./J/y,
СО
о
Изобретение относится к машиностроению и может быть использовано для балансировки роторов машин в процессе работы.
Цель изобретения - сокращение времени балансировки за счет оптимизаци траектории движения корректирующих масс.
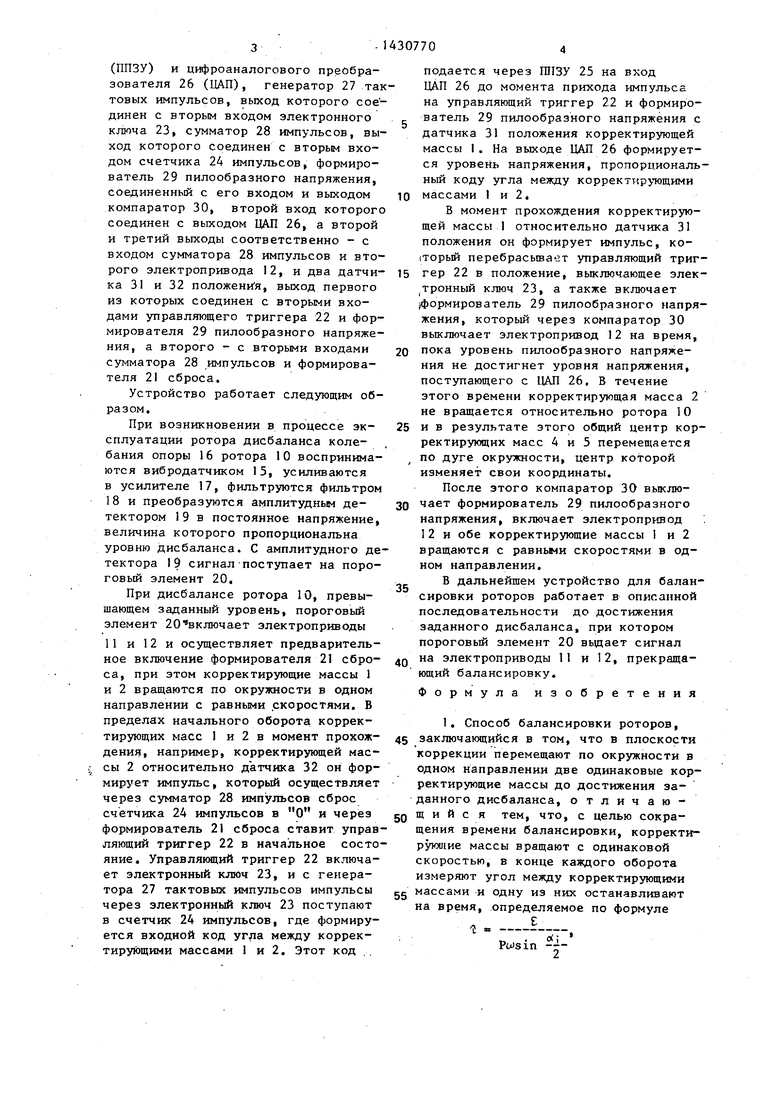
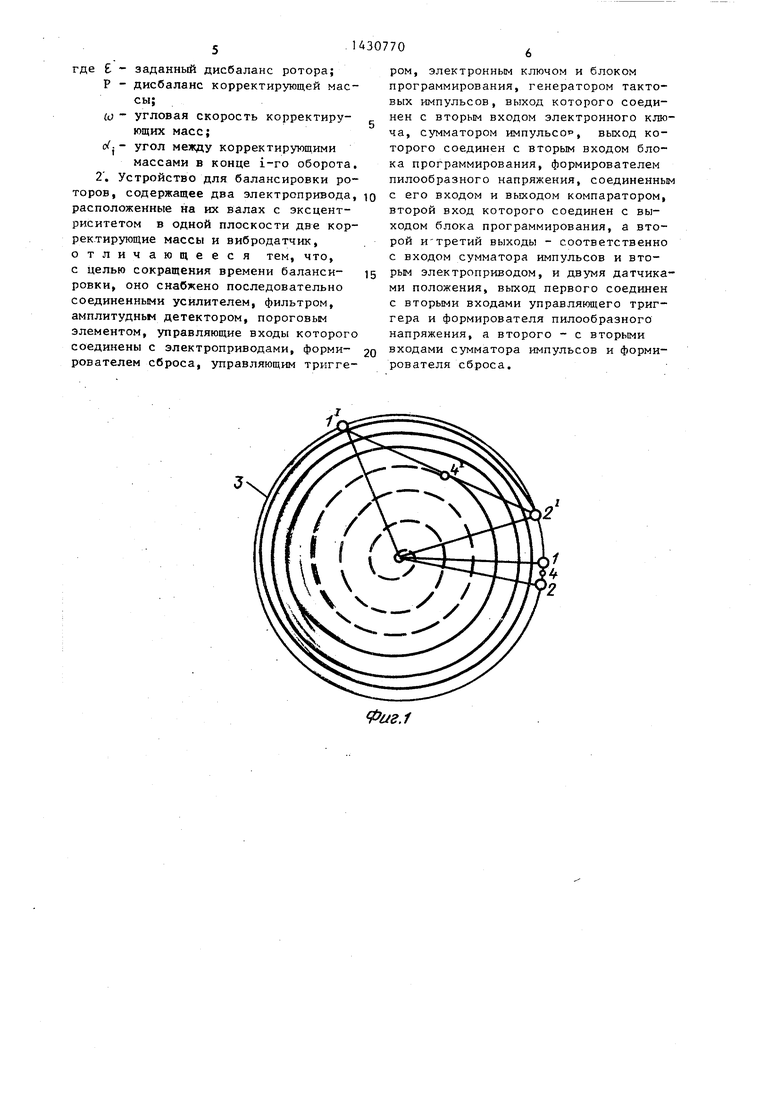
На фиг. 1 и 2 представлена схема перемещения корректирующих масс; на фиг, 3 - блок-схема устройства для балансировки роторов,
Способ балансировки роторов заключается в том, что в плоскости коррекции ротора перемещают по окружности в одном направлении одновременно две одинаковые корректирующие массы до достижения заданного днсбаланса, обе корректирующие массы перемещают с равными скоростями, в конце каждого оборота измеряют угол между ними и одну из корректирующих масс останавливают на время, которое определяют по формуле
P sinUi72)
.где - заданный дисбаланс ротора; Р - дисбаланс корректирующей
массы;
(А) - угловая скорость корректирующих масс;
d. - измеренный угол между корректирующими массами, соответствующий i-му обороту. Способ балансировки роторов осуществляется следующим образом.
При изменении дисбаланса ротора в процессе его эксплуатации таким образом, что заданный его дисбаланс достигается, например, в положении 1 , 2- корректирующих масс, перемещают обе корректирующие массы 1 и 2 из произвольных начальных положений одновременно с равными скоростями, в одном направлении по окружности 3 (см. фиг. 2), В пределах начального оборота корректирующих масс, например, в положении 1 и измеряют угол d между ними и корректирующую массу 2 останавливают на время, которое определяют по формуле
т -- - -(
Pwsin(rf,/2)
где - заданный дисбаланс ротора; Р - дисбаланс корректирующей массы;
0
5
0
5
0
tJ - угловая скорость корректирующих масс;
о( - измеренный угол между кор- ректирующими массами.
В результате общий центр 4 корректирующих масс перемещается по дуге 5 окружности из положения 4 в положение 4. За время остановки корректирующей массы 2 корректирующая масса 1 перемещается из положения 1 в положение l , а общий центр корректирующих масс по дуге 6 из положения 4 - в положение 4.
После этого перемещают обе корректирующие массы 1 и 2 с равными скоростями в одном направлении по окружности 3 на один оборот. Общий центр 4 корректирующих масс при этом совершает оборот по окружности 7. В конце оборота корректирующих масс 1 и 2, т.е. в положении I-, 2, измеряют угол между ними и корректирующую массу 2 останавливают на время, которое определяют по формуле (1). За это время корректирующая масса 1 перемещается из положения 1 в положение , а общий центр корректирующих масс по дуге 8 из положения 4 - в положение 4 - . Затем перемещают обе корректирующие массы 1 и 2 с равными скоростями в одном направлении по окружности 3.
. из положения 1- , 2 в положение 1
1У
5
0
5
0
5
2-. В результате общий центр 4 этих масс перемещается 9 окружности из положения 4- в положение 4-, в котором, достигается заданный дисбаланс ротора.
Устройство для балансировки роторов содержит корректирующие массы 1 и 2, расположенные внутри полого ротора 10 два электропривода 11 и 12, на валах 13 и 14 которых с эксцентриситетом в одной плоскости установлены соответственно корректирующие массы 1 и,2, последовательно соединенные вибродатчик 15, установленный на опоре 16 ротора 10, усилитель 17, фильтр 18, амплитудный детектор 19, пороговый элемент 20, управляющие входы которого соединены с электроприводами 11 и 12, формирователь 21 сброса, управляющий триггер 22, электронный ключ 23 и блок программирования, вьтолненные, например, в виде последовательно соединенных счетчика 24 импульсов, постоянного программируемого запоминающего устройства 25
(ППЗУ) и цифроаналогового преобразователя 26 (ЦАП), генератор 27 так товых импульсов, выход которого соединен с вторым входом электронного ключа 23, сумматор 28 импульсов, выход которого соединен с вторым входом счетчика 24 импульсов, формирователь 29 пилообразного напряжения, соединенный с его входом и выходом компаратор 30, второй вход которого соединен с выходом ЦАП 26, а второй и третий выходы соответственно - с входом сумматора 28 импульсов и второго электропривода 12, и два датчика 31 и 32 положения, выход первого из которых соединен с вторыми входами управляющего триггера 22 и формирователя 29 пилообразного напряжения, а второго - с вторыми входами сумматора 28 импульсов и формирователя 21 сброса.
Устройство работает следующим образом.
При возникновении в процессе эксплуатации ротора дисбаланса колебания опоры 16 ротора 10 воспринимаются вибродатчиком 15, усиливаются в усилителе 17, фильтруются фильтром 18 и преобразуются амплитудным детектором 19 в постоянное напряжение, величина которого пропорциональна уровню дисбаланса. С амплитудного детектора 19 сигнал-поступает на пороговый элемент 20.
При дисбалансе ротора 10, превышающем заданный уровень, пороговый элемент 20 включает электроприводы 11 и 12 и осуществляет предварительное включение формирователя 21 сброса, при этом корректирующие массы 1 и 2 вращаются по окружности в одном направлении с равными скоростями. В пределах начального оборота корректирующих масс 1 и 2 в момент прохождения, например, корректирующей массы 2 относительно датчика 32 он формирует импульс, который осуществляет через сумматор 28 импульсов сброс счетчика 24 импульсов в О и через формирователь 21 сброса ставит управляющий триггер 22 в начальное состояние. Управляющий триггер 22 включает электронный ключ 23, и с генератора 27 тактовых импульсов импульсы через электронный ключ 23 поступают в счетчик 24 импульсов, где формируется входной код угла между коррек- тируйщими массами 1 и 2. Этот код .,
подается через ПИЗУ 25 на вход ЦАП 26 до момента прихода импульса на управляющий триггер 22 и формирователь 29 пилообразного напряжения с датчика 31 положения корректирующей массы I. На выходе ЦАП 26 формируется уровень напряжения, пропорциональный коду угла между корректирующими
массами I и 2
В момент прохождения корректирующей массы 1 относительно датчика 31 положения он формирует импульс, ко- 1торый перебрасьшает управляющий три1-
гер 22 в положение, выключающее элек- тронный ключ 23, а также включает (формирователь 29 пилообразного напряжения, который через компаратор 30 выключает электропривод 12 на время,
пока уровень пилообразного напряжения не достигнет уровня напряжения, поступающего с ЦАП 26. В течение этого времени корректирующая масса 2 не вращается относительно ротора 10
и в результате этого общий центр корректирующих масс 4 и 5 перемещается по дуге окружности, центр которой изменяет свои координаты.
После этого компаратор 30 выключает формирователь 29 пилообразного напряжения, включает электропривод 12 и обе корректирующие массы I и 2 вращаются с равньми скоростями в одном направлении.
В дальнейшем устройство для балансировки роторов работает в описанной последовательности до достижения заданного дисбаланса, при котором пороговый элемент 20 вьщает сигнал
на электроприводы 11 и 12, прекращающий балансировку.
Формула изобретения
1. Способ балансировки роторов, заключающийся в том, что в плоскости коррекции перемещают по окружности в одном направлении две одинаковые корректирующие массы до достижения заданного дисбаланса, отличаю- щ и и с я тем, что, с целью сокращения времени балансировки, корректирующие массы вращают с одинаковой скоростью, в конце каждого оборота измеряют угол между корректирующими массами и одну из них останавливают на время, определяемое по формуле
.L,
Pepsin
где - заданный дисбаланс ротора;
Р - дисбаланс корректирующей массы;
W - угловая скорость корректиру- ющих масс;
C/J - угол между корректирующими
массами в конце i-ro оборота, 2, Устройство для балансировки роторов, содержащее два электропривода, расположенные на их валах с эксцентриситетом в одной плоскости две корректирующие массы и вибродатчик, отличающееся тем, что, с целью сокращения времени баланси- ровки, оно снабжено последовательно соединенными усилителем, фильтром, амплитудньм детектором, пороговым элементом, управляющие входы которого соединены с электроприводами, форми- рователем сброса, управляющим триггером, электронным ключом и блоком программирования, генератором тактовых импульсов, выход которого соединен с вторым входом электронного ключа, сумматором импульсор, выход которого соединен с вторым входом блока программирования, формирователем пилообразного напряжения, соединенны с его входом и выходом компаратором, второй вход которого соединен с выходом блока программирования, а второй И третий выходы - соответственно с входом сумматора импульсов и вторым электроприводом, и двумя датчиками положения, выход первого соединен с вторыми входами управляющего триггера и формирователя пилообразного напряжения, а второго - с вторыми входами сумматора импульсов и формирователя сброса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Устройство для измерения величины и угла дисбаланса изделий | 1981 |
|
SU974172A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
Изобретение относится к балансировочной технике. Цель изобретения - сокращение времени балансировки за счет уменьшения траектории корректирующих масс. Сигнал дисбаланса, регистрируемый вибродатчиком 15, обрабатьшается в цифровой форме и преобразуется в цифроаналоговом преобразователе (ЦАП) 26. Корректирующие массы 1 и 2 располагаются на валах 13 и 14 электроприводов 11 и 12, которые вращаются с одинаковой скоростью. В конце каждого оборота изме.- ряют угол между корректирующими массами 1 и 2 с помощью датчиков 31 и 32 положения и останавливают электропривод 12 с помощью управляемого ЦАП 26 компаратора 30 на время E/Pu)sin(« ,-/2), где - заданный дисбаланс; Р - дисбаланс корректирующей массы; и) - угловая скорость корректирующих масс; о1- угол между корректирующими массами в конце i-ro оборота. 2 с.п. ф-лы, 2 ил. Т с (Л
Фиг.1
иг.2.
| Горбунов Б.И., Гусев В.Г | |||
| Уравновешивающие устройства шли})о- вальных станков | |||
| М.: Машиностроение, 1976, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Горбунов Б.И., Гусев В.Г | |||
| Уравновешивающие устройства шлифовальных станков, М.; Машиностроение, 1976 г., с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
