дополнительного генератора, выход которого подключен к одному из входов второго элемента «ИЛИ и третьего элемента М, второй вход которого соединен с нулевым выходом триггера направления «вперед л информационным входом триггера направления «назад, а выход еоединен с одним из входов третьего элемента «ИЛИ, вгорой вход которого соединен со входом второго элемента «ИЛИ и подключен к выходу генератора нмиульсов движения, информационный вход триггера направления «вперед соединен с нулевым выходом триггера направления «назад, тактовый вход которого соединен с последннм выходом счетчика блока иидикацин местоположеиия сосуда, а единнчные выходы трнггеров направлений «вперед и «назад соединены со входами блока управления приводом, причем выход второго элемента «ИЛИ соединен со входами счетчика блока индикации местоположения подъемного сосуда, выход третьего элемента «ИЛИ соединен со входом счетчика заданного пути, суммирующий и вычитающий входы которого соединены с выходами триггера управления, а вход установки в исходное состояние - с выходом второго элемента «И, второй вход которого подключен к единичному выходу триггера направления «назад.
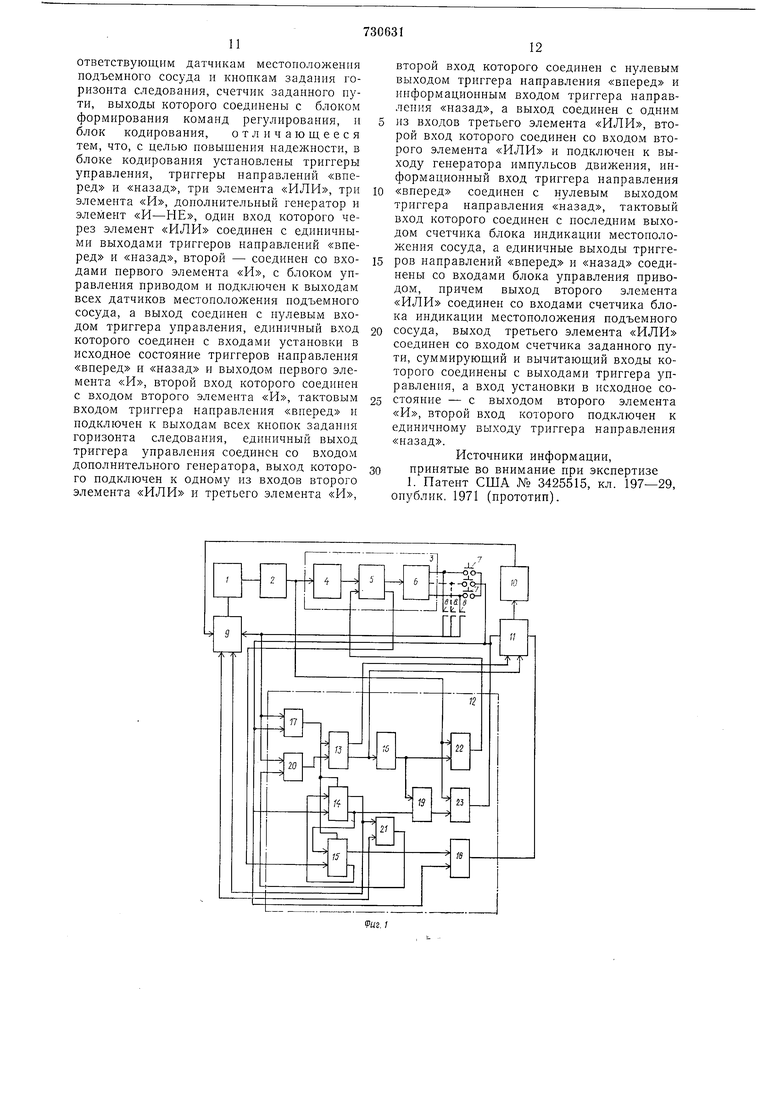
На фиг. 1 представлена блок-схема устройства управления. щахтной подъемной мащииой; на фиг. 2 - диаграмма работы устройства.
Устройство содержит привод 1, связанный с генератором импульсов движения 2, формирующим импульсы, пропорциональные пути, пройденному подъемным сосудом, блок индикации местоположения подъемного сосуда 3, содержащего формирователь сигналов направления движения 4, вход которого соединен с выходом генератора импульсов движения 2, а выходы соединены с соответствующими входами суммирования и вычитания счетчика 5, предназначенного для записи и индикации пути, пройденного подъемным сосудом. Выходы счетчика 5 соединены с входами дещифратора горизонтов 6, выходы которого соответствуют расстоянию между горизонтами, обслуживаемыми подъемной мащиной. Эти выходы соединены соответственно с входами кнопок задания горизонтов следования 7 и датчиков местоположения подъемного сосуда 8. Кнопки задания горизонта следования 7 предназначены для выбора горизонта, к которому необходимо направить подъемный сосуд, и выполнены в виде нормально разомкнутых контактов с зависимой фиксацией (при нажатии одной кнопки все остальные отключаются и размыкают свои контакты). Датчики местоположения подъемного сосуда устанавливаются у каждого горизонта и предназначены
для точной остановки подъемного сосуда у заданного горизонта (при подходе сосуда к горизонту контакт датчика замыкается). Для регулирования скорости движения иодъемиоп мапшны предназначены блок управления ириводом 9 и блок формирования команд регулирования 10, осуществляющий ирограмму регулирования скорости движения по сигналам счетчика заданного
пути И, выходы которого соединены с входами блока формирования команд регулирования. В счетчик заданного пути 11 записывается число, равное расстоянию, которое требуется иройти подъемному сосуду
между заданными горизоитами следования. Это число в процессе движения подъемного сосуда уменьщается пропорционально пройденному пути и становится равиым нулю в момент прибытия подъемного сосуда
на горизонт следования. Заданный путь движения подъемного сосуда вырабатывается с помощью блока кодирования 12, содержащего триггер управления 13, выполненного в виде триггера с раздельными динамическими входами, предназначенного для формирования сигнала разрешения записи пути, который требуется пройти подъемному сосуду, триггеров направления «вперед 14 и «назад 15, предназначенных
для выбора требуемого направления движения и выполненных в виде «Д-триггеров, дополнительный генератор 16, схе.мы «И 17, 18, 19, схему «И-НЕ 20 и схемы «ИЛИ 21, 22 и 23. Входы первой схемы
«И 17 соединены соответственно с выходами кнопок задания горизонта следования 7 и датчиков местоположения подъемного сосуда 8, а выход соедииен с установочиыми входами триггеров иаправления «виеред
14, «назад 15 и единичным входом триггера управлепия 13. Входы второй схемы «И 18 соединены соответственно с единичным выходом триггера направления «назад 15 и выходами кнопок задания горизонта
следования 7, а выход подключен ко входу установки в исходное состояние счетчика заданного пути 11. Входы третьей схемы .«И 19 соединены соответственно с выходом дополнительного генератора 16 и нулевым выходом триггера направлепия «вперед 14, а выход соедииен с одним из входов схемы «ИЛИ 23. Входы схемы «И- НЕ 20 соединены соответственно через схему ИЛИ 21 с единичными выходами
триггеров направления «вперед 14 и «назад 15 и выходами датчиков местоположения подъемного сосуда 8, а выход соединен с нулевым входом триггера управления 13, выходы которого соединены соответственно
с суммирующим и вычитающим входами счетчика заданного иути 11. Информационный вход триггера наиравления «вперед 14 соединеи с нулевым выходом триггера наиравления «назад 15, а тактирующий вход
соединен с выходами кнопок задания горнзонтов следования 7. Информаттионнын вход триггера направленпя «назад соединен с нулевым выходом трнггера направлення «вперед, а информационный вход соединен с носледним выходом счетчика 5 блока индикации местоноложения нодъемного сосуда. Выходы триггеров нанравлення «внеред 14 и «назад 15 соединены с входами блока управления приводом. Один вход схемы «ИЛИ 22 соединен с выходом донолнителыюго генератора 12, а второй - с входом схемы «ИЛИ 23 и выходом генератора импульсов движения 2. Выходы схем «ИЛИ 22 и 23 соединены соответственно с входами счетчнка 5 блока индикации местоноложения подъемного сосуда 3 и счетчика заданного пути 11. Выходы датчиков местоноложения подъемного сосуда 8 соединены также с входом блока унравлення приводом 9.
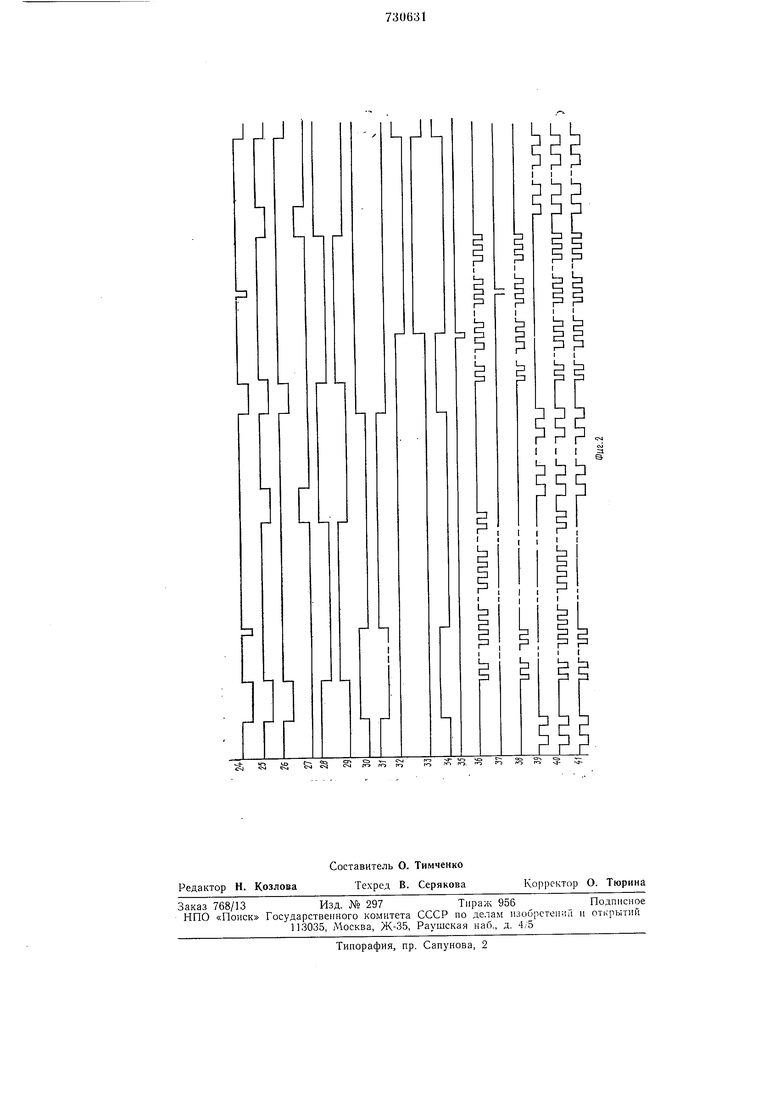
На фиг. 2 изображены сигналы, формируемые в процессе работы устройства: на выходах кнопок заданий горизонта следования 7 - сигналы 24, на выходах датчиков местоиоложения сосуда 8 - сигналы 25. на выходе схемы «И 17 - сигналы 26, на выходе схемы «И-НЕ 20 - сигналы 27, на единичном и нулевом выходах триггера управления 13 - сигналы 28 и 29, на единичном и нулевом выходах трнггера нанравления «вперед 14 - сигналы 30 и 31, на единичном н нулевом выходах триггера направления «назад 15 - сигналы 32 и 33, на выходе схемы «ИЛИ 21 - сигнал 34, на последнем выходе счетчика 5 блока нндикацнн местоноложения нодъемного сосуда - снгнал 35, на выходе донолнительного генератора 16 - сигналы 36, на выходе схемы «И 18 - снгнал 37, на выходе схемы «И 19 - сигналы 38, на выходе генератора нмпульсов движения 2 - сигналы 39, на выходе схемы «ИЛИ 22 (входе счетчика 5 блока индикации местоположення подъемного сосуда 3) - снгналы 40, на выходе схемы «ИЛИ 23 (входе счетчика заданного нути И) -сигналы 41.
Устройство работает следующим образом.
Нуть, который требуется нройтн нодъемному сосуду для достнження заданного горизонта следования, записывается в счетчик заданного пути 11 с помощью сигналов, вырабатываемых блоком направления 12. Одновременно в этом блоке вырабатываются сигналы требуемого направления движения «виеред или «назад, которые поступают в блок управления нриводом. В процессе движения подъемного генератор импульсов движения 2 формирует снгналы, пропорциональные пути, пройденному подъемным сосудом.
Эти сигналы поступают в блок индикации местоположения нодъемного сосуда 3, вырабатывающего информацию о действнтелмюм местоположении сосуда в стволе
итахты (от нулевой отметки ствола) и на вход счетчнка заданного пути 11. При этом в счетчике заданного пути 11 происходит последовательное уменьшенпе числа, равное требуемому нути двнжения сосуда между горизонтами, в соответствнн с нутем, пройденным подъемным сосудом, которое оказывается равным нулю при достиженнн сосудом заданного горизоита следования.
Сигналы с выходов счетчнка заданного пути 11 поступают в блок формировання команд регулирования 10, управляющий работой блока управления приводом 9 в зависимости от числа, записанного в счетчике заданного путп 11. Формирование команд регулировання осуществляется таким образом, чтобы облегчить разгон нодъемного сосуда до заданной скоростн после пуска подъемной мащины н его замедление
прн подходе сосуда к заданному горнзонту назначения по сигналам, формируемым счетчиком заданного нути 11. Окончательная остановка подъемного сосуда на горнзонте назначення осуществляется по сигналам датчиков местонахождения подъемного сосуда 8, контакты которых замыкаются при достижении подъемным сосудом горизоита назначения (в случае, если число, заппсанное в счетчике заданного пути 11,
равно нулю). Эти сигналы поступают в блок управлення приводом 9, вызывая окончательную остановку мащнны. В блок индикации местоиоложения подъемного сосуда 3 поступают сигналы меток путн, нроходимого подъемным сосудом с выхода генератора нмпульсов движения 2. По этнм сигналам формирователь сигналов направлення движения 4 онределяет фактнческое направление движения нодъемного сосуда
«вверх или «вннз и формирует в соответствии с этим сигнал, поступающнй на суммирующий или вычитающий вход счетчика 5, счетный вход которого связан с одним из выходов блока кодирования 12 н на который в процессе двнжения нодъемного сосуда поступают снгналы с выхода генератора 2. Такнм образом, на выходах счетчнка 5 в нроцессе движения нодъемного сосуда формнруется ннформация о его действнтельном местоположенни. Одновременно сигналы с выходов счетчнка 5 поступают на входы дешифратора горизонтов 6, число выходов которого определяется чнслом горизонтов щахты. Снгналы на этнх выходах
формируются в момент-достижения подъемным сосудом соответствующего горизонта. В исходном состоянии, когда подъемный сосуд достиг заданного горизонта назначення, на соответствующем выходе дещифратора горизонтов 6 присутствует снгнал, поступающий через замкйутый контакт соответствующего датчика местоположения подъемного сосуда 8 в блок управления
нриводом 9 и один вход схемы «И 17 блока кодирования 12, а через замкиутый контакт соответствующей кнопки задания горизонта следования 7 на второй вход схемы «И 17 блока кодирования 12 (сигналы 24 и 25 на фнг. 2). В счетчике заданного пути II в это время записано число «нзль. Подъемная машииа остаиовлена. На выходе схемы«И 17 (снгнал 26 на фиг. 2) появляется сигнал, свидетельствующий о прибытии подъемного сосуда на заданный горизонт назначения, который иостуиает на установочные входы триггеров выбора направления «вперед 14 и «назад 15, устанавливая их Б исходиое состояиие, при котором на их единичиых выходах присзтствует сигнал «ноль, а на пулевых «единица. Одновременно этот сигнал поступает на единичный вход триггера управления 13, подготавливая его к работе.
Новый горизонт следования задается с помощью кнопок задания горизонта следования 7. При этом все остальные кнопки задания горизонта следования 7, кроме выбранной, находятся в исходном состояиии (контакты разомкнуты). Пусть новый горизонт следования находится «ниже горизонта настоящего местоположення подъемного сосуда. Тогда в момент иажатия кнопки 7 нового горизонта следования на входе схемы «И 17, связанном с выходами всех кноиок задания горизонта следования 7, исчезает сигнал (замыкается киопка 7; вход которой связан с выходом дешифратора б нового горизонта следования). Прн этом на выходе схемы «И 17 (сигиал 26 на фиг. 2) исчезает сигнал, и триггер управлеиий 13 оирокидывается в состояние, ири котором на его единичном выходе появляется, а иа нулевом исчезает сигнал (сигналы 28 и 29 на фиг. 2). Появление сигнала на единичном выходе триггера унравлепия разрещает работу дополнительного генератора 16 (сигнал 36 на фиг. 2) и переключает счетчик заданного пути II на суммирование импульсов. Счетчик 5 блока иидикании местоположения подъемного сосуда также будет суммировать импульсы. Сигналы доиолнительного генератора 16 ностуиают на один вход схемы «И 19, на второй вход которой поступает сигнал с нулевого выхода триггера направления «вперед (сигнал 31 на фиг. 2). При этом на выходе схемы «И 19 формируются сигналы (сигналы 38 на фнг. 2), поступающие через схемы «ИЛИ 23 на вход счетчика задаииого пути 11 (сигналы 24 на фиг. 2). Одновременно сигналы дополнительного генератора 16 через схему «ИЛИ 22 поступают на вход счетчика 5 блока индикации местоположения подъемного сосуда 3.
Таким образом, сигналы дополнительного генератора 16 начинают поступать иа вход обоих счетчиков 5 и 11, имитируя работу подъемной установки и вызывая последовательное переключение счетчиков. Так как
BFioBb заданный горизонт следования находится «ниже горизонта, где иаходится в настоящее время подьемный сосуд, то когда число импульсов, сформированных дополнптсльным генератором 16, окажется равным расстоянию между этими горизонтами, иа выходе дешифратора горизонтов следования 6 появится сигиал, который через замкиутый контакт кнопки задаиия горизонтов следования 7 поступит на тактирующий вход триггера иаправлеиия «вперед (сигнал 24 на фиг. 2). Иа информационный вход этого триггера в этот момент поступает сигнал с нулевого выхода триггера направлений «назад (сигнал 33 на фиг. 2). Такое сочетание еигналов вызывает опрокидывание триггера направления «вперед в момеит окоичания сигнала, поступающего на его тактирующий вход, т. е.
для последующего движения подъемной мапшны задается направление движеиия «вперед (сигиал 30 иа фиг. 2). Одновремеиио исчезиовеиие сигиала е иулевого выхода триггера направления «виеред 14
(сигиал 31 на фиг. 2) приводит к снятию сигналов на выходе схемы «И 19 (сигиал 38 иа фиг. 2) и иа вход счетчика заданного пути прекращается подача импульсов от дополнительного генератора 16 (сигиал 41
на фиг. 2). В счетчике заданного нутп оказывается записаииым число, равное расстоягипо между горизоитом настоящего местоположения иодъемного еоеуда и заданным горизоитом следования. Сигнал с единичкого выхода триггера иаправления «вперед через схему «ИЛИ 21 поступает иа один вход схемы «И-НЕ 20 (сигнал 34 на фиг. 2), подготавливая к работе последнего. Сигиалы с выхода схемы «ИЛИ 22
продолжают поступать иа вход счетчика 5 блока индикации местоположения подъемного еоеуда 5 (еигнал 40 иа фиг. 2). Прн этом счетчик 5 заполняется полностью и на его последнем выходе появляется сигнал,
поступаюпигй на тактирующий вход триггера направления «назад 15 (сигнал 35 на фиг. 2), так как на информационном входе этого триггера присутствует сигнал «ноль, поступающий с нулевого выхода
триггера 14 (выбрано иаправлеипе движения «вперед), то состояние триггера направления «назад не из.меняется (сигналы 32 и 33 иа фиг. 2). В дальнейшем, когда число импульсов, поступпвщпх в счетчик 5, станет равны.м расстоянию, соответствуюп ему настояпгему местоположению подъемного сосуда, сигнал с выхода дещифратора 6 блока индикации местоположения подъемного сосуда 3 через замкиутый контакт датчика 8 постуннт на один из входов схемы «И-НЕ 20 (снгнал 25 на фиг. 2). На втором входе этой ехемы приеутствует сигнал с выхода схемы «ИЛИ 21 (еигнал 34 па фиг. 2). При этом на выходе схемы
«И-НЕ 20 исчезнет сигнал (сигиал 27 на фиг. 2) н триггер управления 13 опрокинется в исходное состояние (сигналы 28 и 29 на фиг. 2), свидетельствующее об окончании задания режима движения подъемной машины к новому горизонту следования. При этом ирекраш,ается работа доиолнительного генератора 16 (сигнал 36 на фиг. 2), счетчику заданного нути И разрешается работа на вычитание импульсов, в блок уиравления поступает сигнал на начало работы подъемной установки. В соответствии с числом, записанным в счетчике 11, блок формирования команд регулирования 10 формирует комаиды, иоступаюш,ие в блок уиравления приводом, н последипй начинает разгон привода. Теперь на входы счетчнка 5 и счетчика заданного пути 11 поступают сигналы с выхода генератора пмпульсов движения 2 через схемы «ИЛИ 22 и 23. По мере приближения подъемного сосуда к заданному горизонту следования, число, записанное в счетчике заданного пути 11, уменьшается. В момент, когда это число достигнет значения начала замедлеиия, блок формирования команд регулирования 10 начинает вырабатывать комаиды замедления привода, который остановится в момент установки счетчика 11 в нс.ходное состояние, иоявления сигнала на выходе дешифратора 6, соответствуюш,его заданному горнзонту иазиачения и срабатыванию датчика местоположения подъемного сосуда 8 на горнзонт назначения. При этом иа входы схемы «И 17 иоступают сигналы (сигналы 24 и 25 иа фиг. 2), вызывающие появление на выходе схемы «И 17 сигнала, устаиавливаюш,его трнггеры иаиравления 14 и 15 в исходное состояние (сигнал 26 на фиг. 2). При задании нового горизонта следования, например «выше, горизонта настоящего местоположения подъемного сосуда на выходе схемы «И 17 исчезает сигиал в момент нажатия соответствующей кнопки задания горизонта следования 7 (сигнал 27 на фиг. 2). Это вызывает опрокидывание триггера уиравления 13 в состояние, при котором на его единичном выходе появляется, а на нулевом исчезает сигнал (сигналы 28 и 29 на фиг. 2). Это вызывает появление сигналов дополнительного генератора 16 (сигнал 36 иа фиг. 2) на выходах схем «ИЛИ 22 н 23 (сигналы 40 и 41 на фиг. 2). Счетчик 5 блока индикации местоположения подъемного сосуда 3 н счетчик заданного нути 11 начинают пересчет этнх импульсов. Так как новый горизонт назначения находится «выше настояшего местоположения подъемного сосуда, то полное заполнение счетчика 5 и появление сигнала на его последнем выходе (сигнал 35 на фиг. 2) произойдет раньше, чем появится сигнал иа выходе дешифратора 6, соответствующий новому горизонту следования. Этот сигнал поступает на тактирующий вход триггера направления «иазад 15, на информационном входе которого в этот момент присутствует сигнал с нулевого выхода триггера направления «виеред 14 (сигнал 31 на фиг. 2). Триггер иаиравления «назад 15 опрокидывается, и на его единичиом выходе появляется сигнал (снгиал 32 иа фиг. 2), иоступающ й через схему «ИЛИ 21 на один вход схемы «И- НЕ 20 и на один вход схемы «И 18. В нроцессе дальнейщей работы счетчика 5, на выходе дещнфратора, соответствующего новому горизонту назначения, появляется сигнал, поступающпй через замкнутый контакт кнопки задания горизонта следования 7 на тактирующий вход триггера 14 и второй вход схемы «И 18 (сигнал 24 на фиг. 2). На информационном входе триггера 14 в этот момеит сигнал отсутствует, так как уже задано направление движения назад (сигнал 33 на фиг. 2) и триггер 14 не меняет свое состояние. Появление сигнала на втором входе схемы «И 18 вызывает появление сигнала на ее выходе (сигнал 37 на фиг. 2), который поступает на вход установки в исходное состояние счетчика заданного пути 11. После сброса счетчика заданного нути в исходное состояние он вновь продолжает накапливать импульсы, поступающие на его вход с выхода схемы «ИЛИ 23 (сигнал 41 иа фиг. 2). В дальнейшем, когда число нмиульсов, ноступпвших в счетчик 5, станет равным расстоянию, соответствующему настоящему местоположению подъемного сосуда, сигнал с выхода дешифратора 6 через замкнзтый контакт датчика 8 иостуиает на один из входов системы «И-НЕ 20 (сигнал 25 на фиг. 2). На втором входе этой схемы присутствует сигнал с выхода схемы «ИЛИ 21 (сигнал 34 на фиг. 2). При этом на выходе схемы «И-НЕ 20 исчезнет сигнал (снгнал 27на фиг. 2), н триггер управления 13 опрокинется в исходное состояние (сигналы 28и 29 на фиг. 2), свидетельствующее об отклонении задания движения подъемной мащииы. Таким образом, прп выборе нового горизонта следования в счетчике заданного пути 11 всегда записано число, соответствующее расстоянию горизонта настоящего местонахождения подъемного сосуда до заданного и триггеры направления определяют требуемое направление движения. Формула изобретения Устройство управления приводом шахтной подъемной машины, содержащее блок формирования команд регулирования, блок управления, вход которого соединен с выходом блока формирования команд регулирования, блок индикации местоположения подъемного сосуда, входы которого соединены с выходом генератора имнульсов , связаииого с приводом подъемиой мащнны, а выходы подключены к со11
ответствующим датчикам местоположения подъемного сосуда н кнопкам задаппя горизонта следования, счетчик заданного пути, выходы которого соединены с блоком формирования команд регулирования, н блок кодирования, отличающееся тем, что, с целью повыгиения надежности, в блоке кодирования установлены триггеры управления, триггеры направлений «вперед и «назад, три элемента «ИЛИ, три элемента «И, дополнительный генератор и элемент «И-НЕ, один вход которого через элемент «ИЛИ соединен с единичными выходами триггеров направлений «вперед и «назад, второй - соединен со входами первого элемента «И, с блоком управления приводом и нодключен к выходам всех датчиков местоположения подъемного сосуда, а выход соединен с нулевым входом триггера управления, единичный вход которого соединен с входами установки в исходное состояние триггеров направления «вперед и «назад и выходом нервого элемента «И, второй вход которого соединен с входом второго элемента «И, тактовым входом триггера направления «вперед н подключен к выходам всех кнопок задания горизонта следования, единичный выход триггера управления соединен со входом дополнительного генератора, выход которого подключен к одному из входов второго элемента «ИЛИ и третьего элемента «И,
12
второй вход которого соединен с нулевым выходом триггера направления «вперед и информационным входом триггера направления «назад, а выход соединен с одним из входов третьего элемента «ИЛИ, второй вход которого соединен со входом второго элемента «ИЛИ и подключен к выходу генератора импульсов движения, информационный вход триггера направления
«вперед соединен с нулевым выходом триггера направления «назад, тактовый вход которого соединен с последним выходом счетчика блока индикации местоноложения сосуда, а единичные выходы триггеров направлений «вперед и «назад соединены со входами блока управления приводом, причем выход второго элемента «ИЛИ соединен со входами счетчика блока индикации местоположения подъемного
сосуда, выход третьего элемента «ИЛИ соединен со входом счетчика заданного пути, суммирующий и вычитающий входы которого соединены с выходами триггера управления, а вход установки в исходное состояние - с выходом второго элемента «И, второй вход которого подключен к единичному выходу триггера направления «назад.
Источники информации,
принятые во внимание при экспертизе
1. Патент США № 3425515, кл. 197-29, опублик. 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1987 |
|
SU1474061A1 |
| Устройство для контроля работы подъемной машины | 1988 |
|
SU1613421A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство для записи данных в траловых зондах | 1975 |
|
SU514256A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1989 |
|
SU1745659A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1990 |
|
SU1794844A1 |
| Устройство для программного управления и контроля хода шахтной подъемной машины | 1985 |
|
SU1299932A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| Устройство для формирования зашитной тахограммы органичителя скорости шахтной подъемной машины | 1984 |
|
SU1240715A1 |
1
I I I
1 I I
I I I
I I
