Изобретение относится к защите шахтных подъемных установок и может использоваться в ограничителях скорости подъемных машин.
Целью изобретения является упрош,ение схемы устройства и повышение надежности.
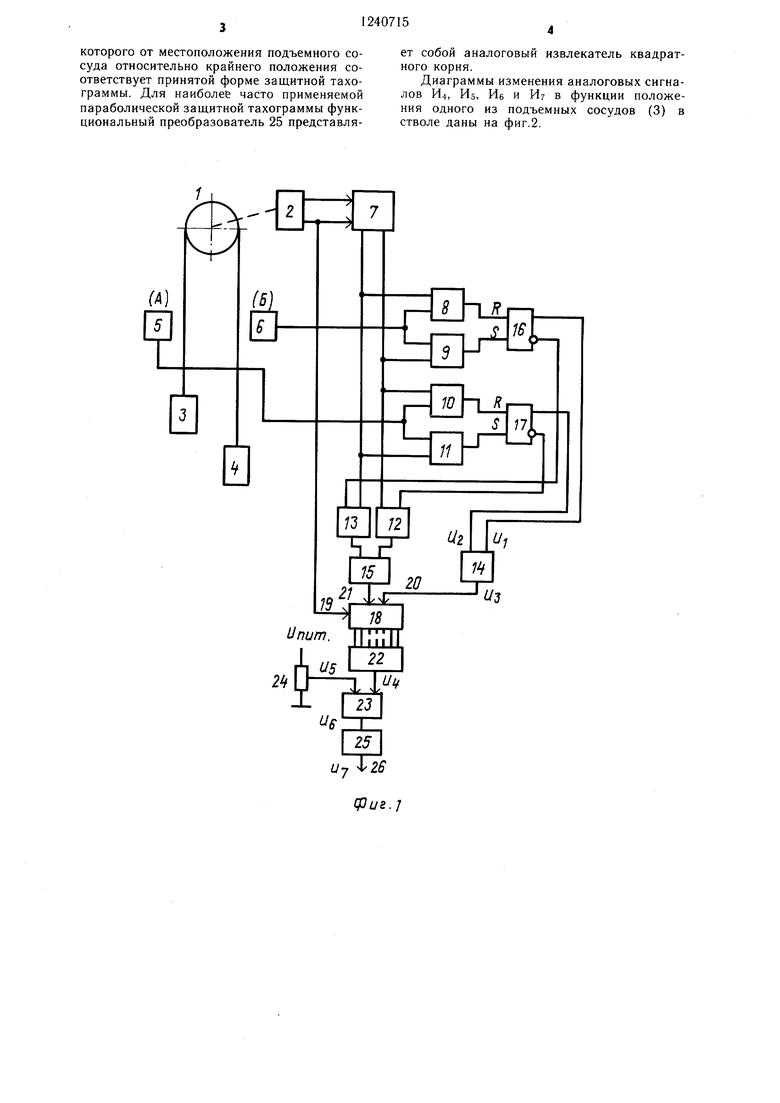
На фиг.1 представлена блок-схема устройства; на фиг.2 - диаграммы, поясняю- шие работу устройства.
Устройство для формирования заш,итной тахограммы ограничителя скорости шахтной подъемной машины содержит кинематически связанный с валом подъемной машины 1 импульсный датчик 2 перемеш.ения. В точках ствола, соответствуюш,их началу замедления одного подъемного сосуда 3 (точка А) и другого 4 (точка Б), установлены бесконтактные датчики (5 и 6) прохождения подъемных сосудов. С датчиком 2 соединен узел 7 определения направления движения. Для обеспечения возможности определения направления движения датчик 2 должен иметь не менее двух чувствительных элементов. По изменению фазы выходных сигналов этих чувствительных элементов узел 7 идентифицирует направление враш,ения подъемной ма- ujKHbi. На фиг.1 показаны два выхода датчика 2, что соответствует наличию двух чувствительных элементов. Узел 7 определения направления движения имеет два выхода, на одном из которых (В) логическая единица появляется при движении машины в направлении «Вперед, а на другом (Н) - при движении в направлении «Назад. Логическая структура, состоящая из схем И 8-14, схемы ИЛИ 15 и / 5-триггеров 16 и 17, управляет реверсивным счетчиком 18, счетный вход которого 19 соединен с импульсным датчиком 2, а входы сброса и остановки счета 20 и направления счета 21 соединены с упомянутой логической структурой. Разрядные выходы реверсивного счетчика 18 соединены с входами цифроаналогового преобразователя (ЦАП) 22. Выход ЦАП соединен с одним из входов вычитателя 23, другой вход которого соединен с потенциометром 24 максимальной контролируемой скорости. Вы- читатель соединен с функциональным преобразователем 25, выход 26 которого является выходом устройства.
Устройство работает следующим образом.
В момент прохождения подъемными сосудами 3 и 4 точек ствола, соответствую- ш.их началу замедления (точки А и Б), где установлены датчики 5 и 6, на выходе последних появляется сигнал логической «1. При прохождении точки А этот сигнал поступает на соединенные входы схем И 10 и 11, а при прохождении точки Б - на входы схем И 8 и 9. Поскольку другие входы указанных схем И соединены с выходами узла 7 определения направления движения, то при этом происходит переключение RS-триггеров
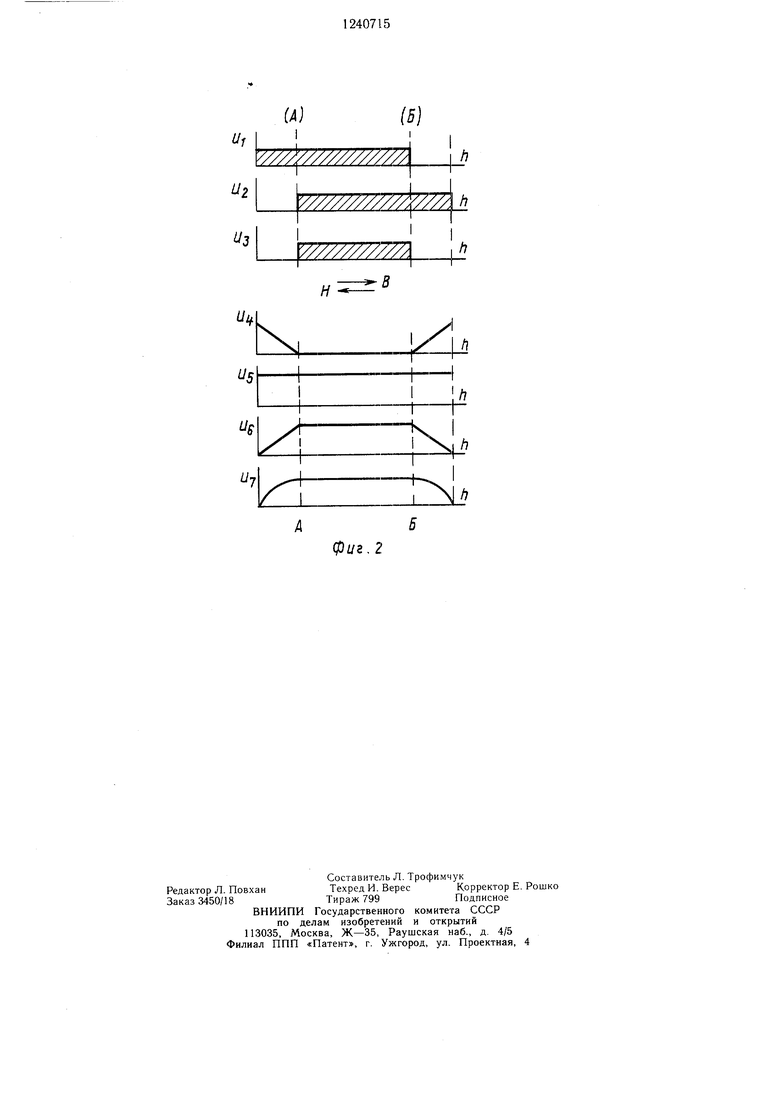
16 и 17 в одно или другое состояние. Диаграммы переключения представлены на фиг.2, где показаны выходные напряжения LJi и U2 триггеров и напряжение Us выхода схемы 5 И 14. При движении машины «Вперед (В) сигнал И| равен логической «1 (на диаграмме заштриховано) от крайнего положения до точки Б начала замедления. При движении «Назад (Н) сигнал И равен логической «1 от другого крайнего положения до точ ки А. Сигнал Из равен логической «1 на участке между точками А и Б независимо от направления движения. Этот сигнал подается на вход 20 сброса и остановки счета реверсивного счетчика 18, за счет чего
, последний находится в нулевом состоянии и не реагирует на импульсы, поступающие на счетный вход 19. На участках замедления (между крайними положениями и точками А и Б) логические единицы появляются на нулевых выходах / 5-триггера 17 (при
20 нахождении подъемного сосуда 3 на участке от точки А до левого по диаграммам крайнего положения) или / 5-триггера 16 (при нахождении подъемного сосуда 4 на участке между точкой Б и правым крайним положением). При этом логическая «Ь подается на один из входов схем И, соединенных с выходами узла 7 определения направления движения.
При нахождении подъемных сосудов в
2Q пределах одного или другого участков замедления логическая «1 на выходе схемы ИЛИ 15 (на входе 2 направления счета счетчика 18) появляется при движении сосудов к крайним положениям. При обратном направлении движения подъемных сосудов
2J (от крайних положений к точкам А и Б) на входе 21 появляется логический «О. Таким образом, счетчик 18 на участке движения с постоянной скоростью (между точками А и Б) заторможен в нулевом состоянии, а на участках замедления работает на сложе40 ние - при движении подъемных сосудов к крайним положениям и на вычитание - при движении их к центру ствола. ЦАП 22 преобразует код, записанный счетчиком 18, в аналоговый сигнал И, равный нулю на участке между точками А и Б и линейно возрастающий при движении подъемных сосудов от этих точек к крайним положениям. Вычитатель 23 производит вычитание сигнала И от постоянного напряжения ИБ, пропорционального максимальному значению
Q контролируемой скорости и устанавливаемого потенциометром 24. Сигнал Иб на выходе вычитателя 23 имеет максимальное значение при нахождении подъемных сосудов на участке ствола между точками А и Б и линейно убывает при приближении последних к край55 ним положениям.
Функциональный преобразователь 25 преобразует линейно изменяющийся сигнал Ие в сигнал Иу, функциональная зависимость
45
которого от местоположения подъемного сосуда относительно крайнего положения соответствует принятой форме защитной тахо- граммы. Для наиболее часто применяемой параболической защитной тахограммы функциональный преобразователь 25 представляет собой аналоговый извлекатель квадратного корня.
Диаграммы изменения аналоговых сигналов И4, Ио, Иб и И в функции положения одного из подъемных сосудов (3) в стволе даны на фиг.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шахтной подъемной машиной | 1978 |
|
SU745845A1 |
| Устройство для управления режимами работы шахтного подъемника | 1981 |
|
SU1094827A1 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Способ защиты шахтной подъемной установки от превышения скорости подъема | 1990 |
|
SU1828841A1 |
| Устройство для программного управления | 1981 |
|
SU960740A2 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| Устройство для программногоупРАВлЕНия | 1978 |
|
SU813374A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНОЙ | 1991 |
|
RU2010766C1 |
| Устройство для регулирования скорости шахтного подъемника | 1978 |
|
SU779230A1 |
| Цифровое программное устройство для задания скорости для шахтных подъемных машин | 1978 |
|
SU765174A1 |
/ TTTTTTI
22
3
i/J
у/////////Щ
Ui,
5 ff
фиг. 2
| Формирователь эталонной скоростидля уСТРОйСТВ зАщиТы шАХТНыХпОд'ЕМНыХ уСТАНОВОК | 1978 |
|
SU844533A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
