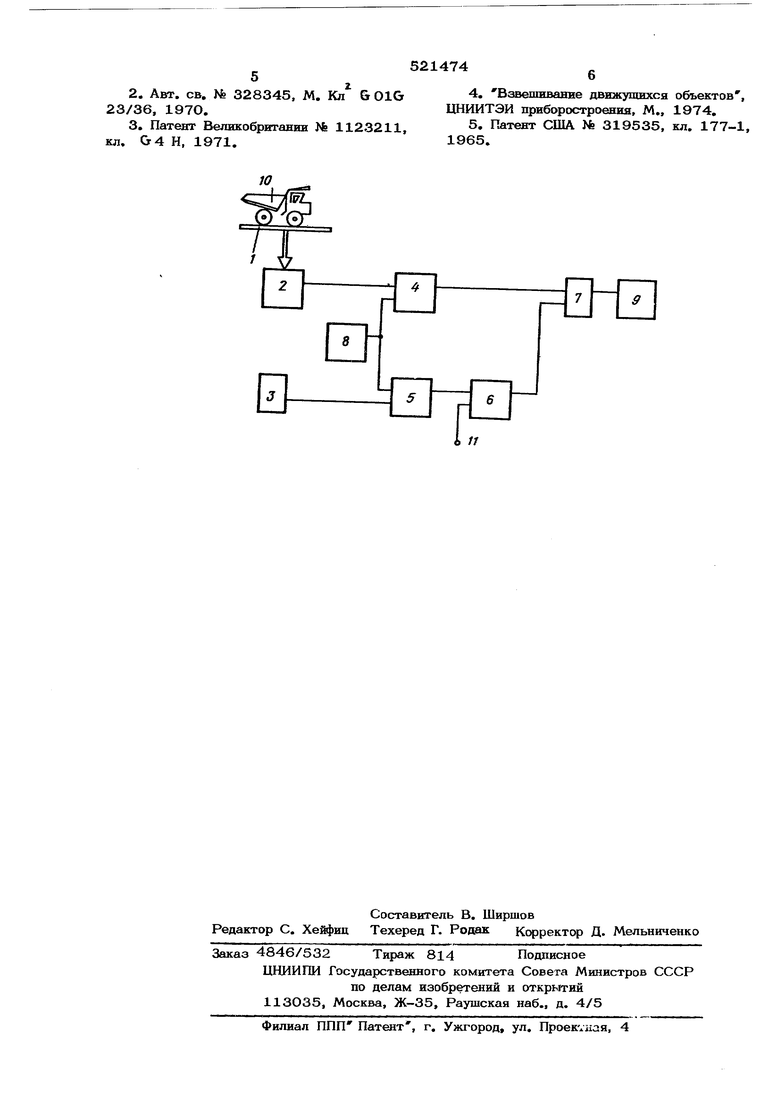
(54) УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ щего импульса на выходе формирователя времени взвешивания зависит от скорости движущегося объекта при взвешивании. Иэмеритель скорости контролирует скорость движущихся объектов непосредственно во время взвешивания и в случае превышения допустимой скорости движения выдает командный импульс, по которому в блоках де ления прекращается деление частоты вход ных сигналов и в формирователе времени взвешивания сокращается оставшееся вреЬЕГ измерения. Ча чертеже представлена блок-схема оюшсываемого устройства, содержащего грузоподъемную платформу 1, частотный датчьк веса 2, генератор 3 эталонной частоты, делители частоты 4 и 5, формирователь 6 времени взвешивания, схему совпадения 7, измеритель скорости 8 и интегрирующий счетчик 9, Устройство предусматривает два режима работы: нормальное и ускоренное взвешивание. В режиме нормального взвешивания производится взвешивание объекта, например автомобиля 10, движущегося по грузоприемной платформе 1 с допустимой скоростью, т. е. с такой скоростью, при которой при заданном времени взвешивания и определенной длине платформы 1 обеспечивается требуемая точность взвешивания. После того, как автомобиль 10 полност въедет на грузоприемную платформу 1, по дается импульс на клемму 11, по которому импульсы с выхода делителя частоты 5, в котором осуществляется деление (например на четыре) частоты сигнала генератор)а 3 эталонной частоты, начинают заполнять регистр времени формирователя 6 времени взвещивания. В течение всего времени заполнения регистра с выхода формирователя 6 времени взвешивания на вход схемы совпадения 7 поступает разрешаюпшй потенциал. При этом сигнал от датчика веса 2 черюз блок деления частоты 4, в котором выполняется деление (например , на четыре частоты датчика веса 2, будет проходить на вход интегрирующего счетчика 9. После переполнения регистра времени формирователя 6 времени взвешивания снимается разрешающи потенциал на входе схемы совпадения 7, и процесс взвешивания заканчивается. Количество импульсов,зафиксированное в интегрирующем счетчике 9, по окончанию взве шивания пропорционально массе автомобиля 10. Если автомобиль 10 во время взвешива ния движется со скоростью, превышающей допустимую, измеритель скорости 8 выдает сигнал, по которому в делителях частоты 4 и 5 прекращается деление частоты входных сигналов, т, е. частота сигнала на входе делителей равна частоте входнътх сигналов (режим ускоренного взвещивания). Увеличение частоты сигнала на выходе делителя частоты 5, поступающего на регистр времени формирователя 6, вызывает сокращение оставшегося времени взвешивания, т, е. сокращение оставшейся длительности разрешающего потенциала на выходе формирователя 6, Так как одновременно с сокращением оставшегося времени взвешивания (например, в четыре раза) происходит увеличение (в четыре раза) частоты сигнала на выходе делителя частоты 4, то цеыа импульса в интегрирующем счетчике 9 не изменяется, и общее количество импульсов, зафиксированное в счетчике 9 к концу измерения, будет пропорционально массе автомобиля 10, Таким образом, в случае движения автомобиля 10 по грузоприемной платформе 1 со скоростью, превьппающей допустимую, сокращение времени взвешивания, хотя и несколько уменьшает точность взвешивания (из-за влияния динамической погрещности), однако позволяет измерить массу автомобиля 10 в течение времени, пока он находится на платформе 1. Формула изобретения Устройство для взвещивания движущихся объектов, например автомобилей, содержащее грузоприемную платформу, опирающуюся на частотный датчик веса, схему совпадения, связанную с формирователем времени взвешивания и интегрирующим счетчиком, отличающееся тем, что, с цельж} расширения диапазона его использования путем увеличения допустимых скоростей движения объектов при взвешивании, оно снабжено измерителем скорости, двумя делителями частоты и генератором эталонной частоты, nj)H4eM вход одного из делителей частоты соединен с датчиком веса, а выход подключен к схеме совпадения, вход втоого делителя частоты соединен с генераором эталонной частоты, а выход подключен формирователю времени взвешивания, при том управлякипие входы обоих делителей чаооты подсоединены к выходу измерителя скороои. Источники информации, принятые во внимание при экспертизе: 1. Авт. св. № 356478, М. Кл 23/36, 1970.
2.Авт. св. № 328345. М. Кл &О1& 23/36, 197О.
3.Патент Великобритании № 1123211, КЛ. СУ4 Н, 1971.
4.Взвешивание движущихся объектов , ЦНИИТЭИ приборостроения, М., 1974.
5,Патент США № 319535, кл. 177-1, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1978 |
|
SU731304A1 |
| Устройство для взвешивания движущихся объектов, например, автомобилей | 1975 |
|
SU515949A1 |
| Устройство для взвешиваниядВижущиХСя Об'ЕКТОВ | 1978 |
|
SU794393A1 |
| Устрой тво для взвешивания движущихся объектов | 1976 |
|
SU600398A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| УСТРОЙСТВО для ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1972 |
|
SU356478A1 |
| Устройство для взвешивания транс-пОРТНыХ СРЕдСТВ | 1979 |
|
SU808865A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для взвешивания | 1976 |
|
SU657270A2 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
